一种机械臂供料装置的制作方法
1.本实用新型涉及供料装置技术领域,特别是涉及一种机械臂供料装置。
背景技术:
2.机械臂供料装置,适用于可叠放、本体处有通孔的工件,且用于为机械臂供料,使工件置于同一位置供机械臂的夹手夹取。可以理解的是,当机械臂夹持工件时,需要对机械臂进行编程,当工件放置位置不定时,编程极其复杂,且由于机械臂的精度问题,还常出现抓取工件失败的情况。
技术实现要素:
3.为解决上述技术问题,本实用新型提供一种工件供料位置同一、托举力均匀的机械臂供料装置。
4.本实用新型的技术方案为:
5.一种机械臂供料装置,包括机架、转盘、转动机构、托举机构和控制单元,所述转盘的边缘处均布有若干呈竖直状设置的套杆,所述机架处设置有轴套,所述轴套处转动连接有转轴,所述转轴的上方设置有安装座,下方设置有调节盘,所述转盘固定连接于所述安装座处,所述调节盘处沿中心均布有与套杆数量相同的卡孔;
6.所述转动机构包括第一推杆、第二推杆、调节臂,所述机架处设置有第二支座,所述第一推杆与所述第二支座铰接,所述调节臂的一端与所述转轴转动连接,所述调节臂的另一端与所述第一推杆的伸缩杆铰接,所述调节臂处设置有第二推杆,所述第二推杆的伸缩杆端部设置有与各所述卡孔适配的卡块;
7.所述托举机构包括驱动电机、滑块、顶杆,所述驱动电机经第一支座与所述机架连接,所述第一支座处设置有与所述滑块适配的滑道,所述顶杆设置于所述滑块处,各所述套杆与所述转盘的连接点附近设置有供所述顶杆穿行的通孔,所述驱动电机用于调整所述滑块的相对位置;
8.所述驱动电机、第一推杆、第二推杆分别与所述控制单元电性连接。
9.优选地,所述机架处设置有若干万向球轴承,各所述万向球轴承沿转盘的回转中心均布,各所述万向球轴承用于承托所述转盘。
10.优选地,各所述套杆的直径包括若干规格,所述转盘处设置有套杆安装座,同一规格的各所述套杆分别与所述套杆安装座螺纹连接。
11.优选地,所述顶杆设置至少两根,且呈均布分布。
12.优选地,所述控制单元的芯片为单片机或者plc可编程控制器。
13.优选地,所述驱动电机为伺服电机或者步进电机。
14.优选地,所述第一支座处设置有用于约束所述顶杆行程的第一传感器、第二传感器。
15.优选地,所述第一传感器、所述第二传感器为干簧管或者红外对射传感器。
16.优选地,所述第一推杆、所述第二推杆均为气动推杆。
17.与现有技术相比,本实用新型的机械臂供料装置,转盘处均布有若干套杆,各套杆处设置有工件,通过托举机构的驱动电机带动顶杆,将设置于套杆处的工件依次顶出,通过调节机构调整各套杆的相对位置,具有工件供料位置同一,且托举力均匀的有益效果。
附图说明
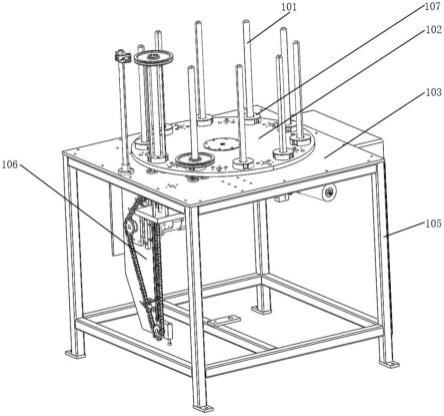
18.图1为本实用新型的机械臂供料装置的一实施例的示意图。
19.图2为本实用新型的机械臂供料装置的一实施例的另一视角的示意图。
20.图3为本实用新型的机械臂供料装置的转轴与轴套相配合的一实施例的示意图。
21.图4为本实用新型的机械臂供料装置的万向球轴承与机架配合的一实施例的示意图。
22.图5为本实用新型的机械臂供料装置的套杆与转盘连接的一优选实施例的示意图。
23.图6为本实用新型的机械臂供料装置的托举机构的一实施例的示意图。
24.图7为本实用新型的机械臂供料装置的转动机构的一实施例的示意图。
25.图8为本实用新型的机械臂供料装置的电路连接示意图。
26.图中标号说明:
27.101-套杆;102-转盘;103-台面;104-转动机构;105-支撑腿;106-托举机构;107-套杆安装座;201-安装座;202-轴套;203-调节盘;204-卡孔;301-万向球轴承;401-第一支座;402-第一传感器;404-传动链条;405-第二传感器;406-滑道;407-滑块;408-顶杆;501-第二支座;502-第一推杆;503-第二推杆;504-调节臂。
具体实施方式
28.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.在本实用新型的描述中,如出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等,其所指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,如出现术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.一种机械臂供料装置,请参见图1-8,包括机架、转盘102、托举机构106、转动机构104和控制单元,所述转盘102的边缘处均布有若干呈竖直状设置的套杆101,所述机架处设置有轴套202,所述轴套202处转动连接有转轴,所述转轴的上方设置有安装座201,下方设置有调节盘203,所述转盘102固定连接于转盘安装座处,所述调节盘203处沿中心均布有与套杆101数量相同的卡孔204;
31.所述转动机构104包括第一推杆502、第二推杆503、调节臂504,所述机架处设置有第二支座501,所述第一推杆502与第二支座501铰接,所述调节臂504的一端与转轴的下方
连接,所述调节臂504处设置有第二推杆503,所述第二推杆503的伸缩杆端部设置有与卡孔204适配的卡块,所述伸缩杆的另一端与第一推杆502的伸缩杆铰接;
32.所述托举机构106包括驱动电机、滑块407、顶杆408,所述驱动电机经第一支座401与机架连接,所述第一支座401处设置有与滑块407适配的滑道406,所述顶杆408设置于所述滑块407处,各所述套杆101与转盘102的连接点附近设置有供顶杆408穿行的通孔,所述驱动电机用于调整滑块407的相对位置;
33.所述驱动电机、第一推杆502、第二推杆503分别与所述控制单元电性连接。
34.在本实施例中,机架用于安装转盘102、托举机构106、转动机构104,其中机架包括支撑腿105、台面103。
35.均布于转盘102的边缘处且呈竖直状设置的套杆101用于防止叠放的工件倾覆,各套杆101均布于转盘102的边缘时为了保证转动机构104在转动一个角度时套杆101均能到达同一位置。所述转盘102经转轴与机架的台面103转动连接,具体的,台面103处固定连接有轴套202,所述转轴与轴套202转动连接,所述轴套202的上方设置有安装座201,转盘102与安装座201固定连接。
36.设置于转轴下方的调节盘203与转动机构104配合使用,具体的,所述转动机构104包括第一推杆502、第二推杆503、调节臂504,所述调节臂504的一端与转轴的下端转动连接,其中,为了防止调节臂504转动时,带动转轴转动,所述调节臂504与转轴间应设置轴承,以减小调节臂504与转轴间的摩擦力。调节臂504处设置有第二推杆503,第二推杆503的伸缩杆端部设置有卡块,调节盘203处均布有与套杆101数量相同的卡孔204,所述卡块与各卡孔204适配。第二支座501设置于台面103的下方。第一推杆502的缸体与第二支座501铰接,第一推杆502的伸缩杆的端部与调节臂504的端部铰接,因此,可使转动机构调节转盘102角度时第一推杆502不受机构自由度的限制。
37.当转盘102位置需要调节时,第二推杆503的伸缩杆缩回,卡块离开卡孔204。第一推杆502的伸缩杆执行推出动作,第一推杆502的伸缩杆带动调节臂504沿着转轴转动,当第一推杆502的伸缩杆运行至最大行程时,第二推杆503的伸缩杆恰好位于转盘102处相邻卡孔204的下方。此时,第二推杆503执行推出动作,卡块卡入卡孔204内。第一推杆502的伸缩杆执行缩回动作,调节臂504带动调节盘203转动,从而实现对转盘102角度的准确调节。其中,鉴于气动推杆具有动作迅速、准确的优点,第一推杆502、第二推杆503可选用气动推杆。为了实现对转盘102多种角度的调节,以及组装后的微调,所述第一推杆502应选用行程可调气动推杆。
38.所述托举机构106用于将叠放于套杆101处的工件依次顶至制定位置。具体的,所述托举机构106包括驱动电机、滑块407、顶杆408,所述第一支座401设置于机架的支撑腿105处,所述驱动电机与第一支座401固定连接,所述第一支座401处设置有与滑块407适配的滑道406,所述滑块407与滑道406滑动连接。所述驱动电机处设置有主动轮,所述第一支座401处设置有换向轮,所述主动轮、换向轮处设置有传动链条404,所述传动链条404与滑块407固定连接,通过驱动电机的转动,可实现滑块407的上下滑动,从而实现驱动电机对滑块407相对位置的调节。所述顶杆408设置于所述滑块407处,各所述套杆101与转盘102的连接点附近设置有供顶杆408穿行的通孔。其中,在托举机构106设计和总装时,应保证滑块407的滑行轨迹与套杆101平行,顶杆408与套杆101平行。
39.所述驱动电机可采用普通单相电机,也可采用伺服电机或步进电机,当采用普通单相电机时,可根据工件的高度,通过控制驱动电机的导通时间实现对套杆101处工件的依次顶出。当采用伺服电机或步进电机时,由于伺服电机或步进电机可实现对转速、转数的精准控制,因此,可根据工件的高度对驱动电机进行编程即可实现对套杆101处工件的依次顶出。
40.所述控制单元用于对转动机构104、托举机构106进行控制。所述驱动电机、第一推杆502、第二推杆503分别与所述控制单元电性连接,具体的,所述驱动电机采用普通单相电机时,所述驱动电机分别通过正转继电器、反转继电器与电源并联,所述正转继电器、反转继电器分别与所述控制单元的i/o接口电性连接,所述控制单元通过对继电器的控制实现对驱动电机正反转的控制,以实现对工件的顶出,以及顶杆408的缩回。当驱动电机采用步进电机或伺服电机时,驱动电机的信号线与所述控制单元的i/o接口电性连接,以实现对工件的顶出,以及顶杆408的缩回。所述第一推杆502、第二推杆503的电磁阀与所述控制单元的i/o接口电性连接,以实现对第一推杆502、第二推杆503的伸缩进行控制。
41.在使用时,所述控制单元与机械臂的控制器联动。先将转盘102的各套杆101处按一定角度填装特定数量的工件。当顶杆408顶出一个工件时,所述控制单元向机械臂发出抓取的反馈信号,机械臂进行一次抓取动作,直至该套杆101处的工件抓取完毕,所述控制单元向机械臂发出停止信号。待顶杆408缩回,转动机构104将相邻套杆101调整至托举机构106上方,且该套杆101处的工件顶出时,所述控制单元再次向机械臂发出抓取的反馈信号,机械臂再次执行抓取动作。
42.可以理解的是,所述控制单元的控制功能是依赖于所述控制单元硬件本身及安装于所述控制单元内的程序实现的,其中,所述控制单元的芯片可选用单片机或plc可编程控制器。
43.在本实施例中,所述机架处设置有若干万向球轴承301,各所述万向球轴承301沿转盘102的回转中心均布,各所述万向球轴承301用于承托转盘102。具体的,各万向球轴承301设置于台面103的上表面,在使用时,各万向球轴承301与转盘102的下表面接触,起到对转盘102承托的作用,使得转盘102保持水平状态,使得待抓取的工件位置同一。
44.在本实施例中,各所述套杆101的直径包括若干规格,所述转盘102处设置有套杆安装座107,同一规格的各所述套杆101分别与套杆安装座107螺纹连接。在具体的使用时,可根据工件处的通孔更换合适尺寸的套杆101,该设计提升了装置的适用性,同时套杆101与工件处通孔的略过盈配合还可保证工件抓取位置的同一性,实现机械臂的准确抓取。
45.在本实施例中,所述顶杆408设置至少两根,且呈均布分布。顶杆408设置至少两根,以保证托举力的均匀。
46.在本实施例中,所述第一支座401处设置有用于约束顶杆408行程的第一传感器402、第二传感器405,具体的,第一传感器402,第二传感器405分别与所述控制单元处的i/o接口电性连接。在使用时,当第一传感器402触发时,表示滑块407已至最高行程,所述控制单元收到该触发信号后可立即使驱动电机执行返回动作。当第二传感器405触发时,表示滑块407已行至最低行程,所述控制单元收到该触发信号后可立即使驱动电机停止返回动作。该设计提升了托举机构106运行的安全可靠性。其中,所述第一传感器402、所述第二传感器405可选用干簧管或红外对射传感器。
47.以上所述实施例,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不仅限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围之内,根据本实用新型的技术方案及其实用新型构思加以等同替换或者改变,都应该覆盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1