一种双电压逆变焊机的倍压和上电缓冲控制电路的制作方法
1.本实用新型涉及一种双电压逆变焊机的倍压和上电缓冲控制电路,属于逆变焊机技术领域。
背景技术:
2.目前,双电源电压逆变焊机产品市场的竞争十分激烈,不仅体现在技术的先进性和优势上,还在很大程度上取决于焊机的功能、控制电路设计等方面。
3.市场上,小型双电源电压逆变焊机的额定电流通常在250a以下,供电电源为单相220v,或者单相380v都能使用。但很多此类产品的故障率高,客户投诉不少。存在的主要问题是:1)单相220v和380v电源自动识别和倍压转换控制电路采用模拟器件组成的电路进行控制,控制性能受电路复杂性、模拟器件的离散性和温度变化的影响,电路工作不稳定,同时,输入电压高低的检测点通常只有单一的直流母线电压高低信号,这就容易导致控制电路工作不可靠。例如,如果发生高输入电源电压下进行倍压转换,必然会出现igbt炸管等机器故障;2)采用模拟电路控制上电缓冲电路的继电器,电路可靠性低;3)一般的逆变焊机,通电一段时间后,其上电缓冲电路中的继电器一直处于动作状态,或者说串联在输入回路中的限流热敏电阻一直处于被短接的状态,在这种情况下,其倍压转换是在有较大的电流流过倍压继电器的触头或开关的情况下进行的,因而,这种控制方法烧坏倍压继电器的几率是非常高的,这也是一般双电压逆变焊机故障率高的重要原因之一。如何解决好上述问题,一直是电焊机设计开发人员面临的课题。
4.因此,如何开发性能好、可靠性高的控制电路是本实用新型需要解决的问题。
技术实现要素:
5.本实用新型的目的在于一种双电压逆变焊机的倍压和上电缓冲控制电路,用于供电电源为单相220v或380v逆变焊机的倍压电路和上电缓冲电路的控制,利用微处理器控制电路系统,控制上电缓冲电路的工作状态,并采用检测逆变焊机主电路中整流和电解电容滤波后的直流母线电压或上臂电解电容的电压、下臂电解电容的电压的多点检测的方法,自动识别焊机的输入电源电压,控制倍压电路的工作状态;避免了模拟电路和单点检测控制存在的短处,提高了倍压转换及其控制电路的可靠性。
6.为实现上述目的采用以下技术方案:
7.一种双电压逆变焊机的倍压和上电缓冲控制电路,包括倍压和上电缓冲电路和控制电路,其特征在于:ac-in1和ac-in2是倍压和上电缓冲电路的电源接线端,ac-in1接线端与单相全波整流器bg1的电源输入一端之间串联有热敏电阻rt1,在rt1两端并联有的jdqb触点或开关,jdqb为上电缓冲继电器jdqa的触点或开关;并联的热敏电阻rt1和jdqb触点或开关组成所谓的上电缓冲电路的主电路,单相全波整流器bg1的输出两端连接串联电阻r01和电阻r02,串联的电解电容ec01、ec02也连接在bg1的输出两端,r01和r02是分压或均压电阻,也是电解电容ec01、ec02的放电电阻,电解电容ec01、ec02后级连接的inverter电路称
为逆变电路;电阻r01、r02的连接中点连接至电解电容ec01、ec02的连接中点,同时还连接至jdq1b触点或开关的一端,jdq1b触点或开关的另一端连接电源输入端ac-in2和单相全波整流器bg1的另一端电源输入,jdq1b触点或开关是倍压继电器jdq1a的触点或开关;所述的电解电容ec01称为上臂电解电容;电解电容ec02也称为下臂电解电容;电阻r03与电阻r04串联后并联在ec02电解电容的两端,是分压电路的两个电阻,通过电阻r03与电阻r04的中间连接点可获得电解电容ec02下臂电解电容两端的adl1电压检测信号,也称为下臂电容电压检测信号;电阻r05与电阻r06串联后并联于+vcc电压及其地的两端,也是分压电路的两个电阻,通过电阻r05与电阴r06的中间连接点连接电阻r07电阻,可获得+vcc电压的检测信号adh,称为直流母线电压检测信号;下臂电容电压检测信号和直流母线电压检测信号分别连接控制电路的下臂电压信号输入端和母线电压信号输入端连接;所述的控制电路具有mai信号端输出端和dv信号输出端,mai信号控制上电缓冲继电器jdqa的通断,dv信号控制倍压继电器jdq1a通断。
8.所述的控制电路包括电阻r1~r12、电容c1~c5、电解电容ec1和ec2、输出的集成稳压器u4、二极管d1和d2、pnp型开关三极管q1和q2、光耦u1和u2、微处理器u3、发光二极管e、l和h、插座m、烧写微处理器程序用的jtag插座以及直流电源;
9.插座m的1脚连接+24v直流电源,插座m的2脚连接+24v直流电源的地;插座m的3脚,连接pnp型开关三极管q1的集电极,pnp型开关三极管q1的发射极接+24v直流电源,pnp型开关三极管q1q1的基极连接电阻r1和电阻r2,电阻r2的另一端接+24v直流电源,电阻r1的另一端连接光耦u1中u1b的集电极,而u1b的发射极接+24v直流电源的地,光耦u1中u1a的阴极连接电阻r5,电阻r5的另一端连接微处理器u3的15脚,u1a的阳极接+5v直流电源;插座m的4脚连接pnp型开关三极管q2的集电极,pnp型开关三极管q2的发射极接+24v直流电源,pnp型开关三极管q2的基极连接电阻r3和电阻r4,电阻r3的另一端接+24v直流电源,电阻r4的另一端连接光耦u2中u2b的集电极,而u2b的发射极接+24v直流电源的地,光耦u2中u2a的阴极连接电阻r6,电阻r6的另一端连接微处理器u3的16脚,u2a的阳极接+5v直流电源;插座m的8脚连接倍压和上电缓冲电路的下臂电容电压检测采样信号端adl1,插座m的8脚还连接二极管d1的阳极和电阻r7,二极管d1的阴极接+5v直流电源,电阻r7的另一端连接电容c1和微片理器u3的11脚,电容c1的另一端接地;插座m的9脚连接+12v直流电源和电阻r8,电阻r8的另一端连接电解电容ec1的正极、输出的集成稳压器u4的输入端,电解电容ec1的负极和输出的集成稳压器u4的接地端接地,输出的集成稳压器u4的输出+5v端连接电解电容ec2的正极、电容c2和电容c3,电解电容ec2的负极、电容c2和电容c3的另一端接地;插座m的10脚连接倍压和上电缓冲电路的直流母线电压检测信号端adh,插座m的10脚还连接微处理器u3的19脚、二极管d2的阳极和电容c4,电容c4的另一端接地,二极管d2的阴极接+5v直流电源;插座m的11脚接地;jtag插座的1脚接+5v,其4脚接地,其2脚连接微处理器u3的2脚,其3脚连接微处理器u3的1脚,编写好的微处理器控制程序通过烧写器和jtag插座的连接,写入微处理器u3中;微处理器u3的3脚连接发光二极管e的阴极,发光二极管e的阳极连接电阻r12,电阻r12的另一端连接+5v直流电源,发光二极管e为总的直流母线电压异常故障指示灯;微处理器u3的4脚连接电容c5和电阻r9,电容c5的另一端接地,电阻r9的另一端接+5v直流电源;微处理器u3的5脚连接发光二极管l的阴极,发光二极管l的阳极连接电阻r11,电阻r11的另一端连接+5v直流电源,发光二极管l为下臂电容电压的异常故障指示灯;微处理器u3的6脚悬
空;微处理器u3的7脚和8脚接地;微处理器u3的9脚接+5v直流电源;微处理器u3的10脚连接发光二极管h的阴极,发光二极管h的阳极连接电阻r10,电阻r10的另一端连接+5v直流电源,发光二极管h为上臂电容电压的异常故障指示灯;微处理器u3的11脚连接电阻r7和电容c1;微处理u3的15脚输出信号端控制光耦u1的工作状态,最终通过插座m的4脚的mai信号去控制上电缓冲继电器的工作状态;u3的16脚输出信号端控制光耦u2的工作状态,最终通过插座m的4脚的dv信号去控制倍压继电器的工作状态。
10.控制电路通过插座m的插头及其控制线与焊机的电路部分连接,插座m的1脚接+24v,其2脚接+24v的地,其3脚的输出控制信号mai去控制上电缓冲继电器的工作,其4脚的输出控制信号dv去控制倍压继电器的工作,其8脚通过分压电阻的分压获取adl1下臂电容电压检测采样信号,其9脚接+12v,其10脚通过分压电阻的分压获取adh直流母线电压检测信号,其11脚接地,在微处理器u3控制程序的控制下,可实现逆变焊机的上电缓冲和倍压电路的控制。
11.该控制的大致过程如下:
12.逆变焊机通过电源开关接通输入电源后,上电缓冲电路中的继电器(如jdqa)不动作,热敏电阻rt1会接入输入回路中限制焊机上电期间的浪涌电流,防止烧坏焊机的电源开关;倍压继电器不会动作;输入电源经整流器整流后获得直流电压,此电压再经后级电解电容的滤波,可变换为较高的直流母线电压;同时,焊机的电源电路会产生+24v、+12v工作电源,于是,本实用新型电路部分也会产生+5v电源,为微处理器u3及其外围的控制电路提供工作电源。在微处理器u3控制软件的作用下,从开始程序运行时刻算起,会进行2秒的软件控制延时,之后,u3微处理器的15脚会输出低电平,使u1a发光二极管发光,u1b三极管导通,可使三极管q1导通,于是,mai控制信号变为近+24v的高电压信号,使上电缓冲电路中的继电器动作,该继电器的触点或开关短接rt1热敏电阻,之后会进行0.5秒的软件控制延时,接下来,控制系统会对前面所述的adh和adl2信号进行采样、a/d模数转换,获得直流母线电压、上臂和下臂电解电容的电压采样数据;依据上述采样获得的数据,即可判断焊机接入的供电电源电压是220v电压级别的,还是380v电压级别的;之所以说是某个电压级别的,是因为电网电压是有波动的,不一定是准确的220v或380v;
13.如果adh信号的采样数值大于交流260v对应的数值,或者adl2信号的采样数值大于交流130v对应的数值,那么,控制系统会判定焊机接入的电源电压是属于380v电压级别的,此时,控制系统发出的指令不会使倍压继电器吸合,也就是说,不进行倍压工作;焊机将进行正常逆变等输出控制。
14.否则,控制系统会判定焊机接入的电源电压是属于220v电压级别的,在这种情况下,微处理器u3的15脚会输出高电平,使u1a发光二极管不会发光,u1b三极管截止,可使q1三极管截止,于是,mai控制信号变为低电平信号,使上电缓冲电路中的继电器不动作,该继电器的触点或开关不会短接rt1热敏电阻;之后,会进行0.1秒的软件控制延时,接下来微处理器u3的16脚会输出低电平,使u2a发光二极管发光,u2b三极管导通,可使q2三极管导通,于是,dv控制信号变为近+24v的高电压信号,使倍压电路中的继电器动作,该继电器的触点或开关jdq1b闭合,实现电路的倍压转换;在此之后,会进行2秒的软件控制延时,之后,微处理器u3的15脚会输出低电平,使u1a发光二极管发光,u1b三极管导通,可使q1三极管导通,使mai控制信号变为近+24v的高电压信号,使上电缓冲电路中的继电器jdqa动作,该继电器
的触点或开关短接rt1热敏电阻;同时,焊机将进行正常逆变等输出控制。
15.在上述220v电压级别的电源判定后,首先使上电缓冲电路中的继电器jdqa不动作的目的,是使后面倍压继电器jdq1a的动作在有rt1接入的情况下进行,有利于减小流过倍压继电器的触头或开关jdq1b的电流,防止因电流过大而烧坏此触头或开关;这是有利于保护和提高倍压继电器以及焊机可靠性的。
16.在倍压转换完成之后,再使上电缓冲电路中的继电器jdqa动作,进入后期的正常逆变控制过程,上述这一点与一般逆变焊机通电一段时间后上电缓冲电路中的继电器一直处于动作状态,或者说rt1热敏电阻一直处于被短接的状态是完全不同的,后者,其倍压转换是在有较大的电流流过倍压继电器的触头或开关的情况下进行的,因而后者的这种控制方法烧坏倍压继电器的几率是非常高的;这也是一般双电压逆变焊机故障率高的重要原因之一。
17.如果监测到adh信号和adl2信号的采样数值异常,包括上臂电解电容两端的电压计算值异常,控制系统会依据异常的情况,去控制发光二极管e、l和h指示灯的点亮,实现对总的直流母线电压异常、下臂电容电压的异常和上臂电容电压的异常的故障指示;通过观察是哪个指示灯点亮,即可知道电路是哪个方面的故障,有利于查找焊机工作中出现的问题,提示用户进行相应地处理。
18.本实用新型的控制电路主要是完成上电缓冲控制、输入电源电压自动识别和倍压转换电路控制等工作;在控制电路的作用下,实现自动识别输入电源电压,并自动转换倍压控制电路;实现上电缓冲电路的控制;最终满足逆变焊机的控制要求,保障焊机工作的可靠性。本焊机的控制电路,经大量的实测和实际应用效果证明,电路的工作可靠性较高,控制性能达到了预期的结果。
附图说明
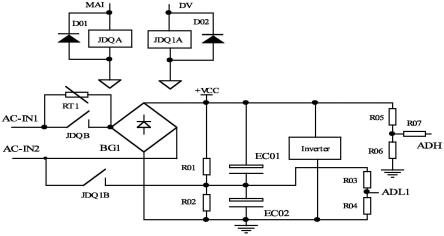
19.图1是双电压逆变焊机倍压和上电缓冲电路的主电路原理示意图;
20.图2是本实用新型焊机倍压和上电缓冲电路的控制电路原理图。
具体实施方式
21.如图1是双电源电压逆变焊机常见的倍压和上电缓冲电路的主电路原理图,ac-in1和ac-in2是焊机的输入电源接线端,即220v或380v单相交流电源的输入端;rt1是热敏电阻,并联在rt1两端的jdqb触点或开关,是继电器jdqa的触点或开关,当上电缓冲继电器jdqa动作时,jdqb闭合。并联的rt1和jdqb串联在焊机的输入回路中,连接至bg1单相全波整流器的电源输入一端。并联的rt1和jdqb组成所谓的上电缓冲电路的主电路,而控制继电器jdqa的电路则称为上电缓冲控制电路;bg1是二极管组成的单相全波整流器;串联的电阻r01、r02连接在bg1的输出两端,r01的阻值与r02的相同,r01和r02是分压或均压电阻,也是电解电容ec01、ec02的放电电阻,焊机不工作时,把电解电容上储存的高压电释放掉,可起到安全的作用。串联的电解电容ec01、ec02也连接在bg1的输出两端,ec01的电容容值与ec02的相同;ec01、ec02电解电容后级连接的inverter电路称为逆变电路,它可以是单端正激、半桥和全桥逆变电路中的某一种电路;电阻r01、r02的连接中点连接至电解电容ec01、ec02的连接中点,同时还连接至jdq1b触点或开关的一端,jdq1b触点或开关的另一端连接
电源输入端ac-in2和bg1单相全波整流器的电源输入另一端。jdq1b触点或开关是继电器jdq1a的触点或开关。
22.附图1中,当倍压继电器jdq1a不动作时,jdq1b不闭合,此时,ac-in1和ac-in2焊机的输入电源接线端连接的供电电压是380v高电压级别的,并且,ec01、ec02电容不参与倍压,只是起到电解电容滤波的作用,与此同时,电路中bg1输出的电压+vcc可获得较高的值,如500v左右的电压。特别说明的是:380v高电压级别输入的时候,是不允许jdq1b闭合的,也就是不允许倍压电路工作,否则,如果jdq1b闭合,则会使bg1输出的电压很大,可能会造成后级电解电容和inverter逆变电路严重损坏。这是需要避免的情况。
23.附图1中,当倍压继电器jdq1a动作时,jdq1b闭合,此时,ac-in1和ac-in2焊机的输入电源接线端连接的供电电压是220v低电压级别的,并且,ec01、ec02电容参与倍压,ec01、ec02既是滤波电容,也是倍压电路中的倍压电容。这里所说的倍压,就是当输入电源电压为220v低电压级别的时候,通过jdq1b闭合,使ec01、ec02电容参与倍压,最终使bg1输出的电压+vcc处于较高的电压,如500v左右的电压。这可使焊机的逆变电路在较高的工作电压下进行,最终保证焊机在较低的输入电压下工作时获得较大的输出或焊接电流。220v低电压级别输入时,如果jdq1b不闭合,则为倍压失败,会导致逆变电路和焊机的输出无法满足设计要求。这也是需要避免的情况。
24.附图1中,继电器jdq1a通常称为倍压继电器,而控制该继电器动作的电路则称为倍压控制电路。
25.因此,双电压的逆变焊机,需要检测输入电压的高低,并根据检测的结果决定什么时候进行倍压控制和工作。这是非常重要的。如果控制电路工作中出现错乱,该倍压时不倍压,不该倍压时却倍压,那就会引起焊机故障,无法保证其可靠工作。这也是一些双电压的逆变焊机常见的故障现象,降低了焊机的可靠性。
26.上电缓冲电路的作用,是利用接入的rt1热敏电阻限制上电或接通焊机电源开关后的输入电流的大小,防止过大的电流烧坏焊机的电源开关。当需要焊机正常工作时,则需要利用rt1并联的继电器触点或开关短接rt1。
27.上电缓冲电路及其控制电路,对焊机的工作可靠性也有着重要的影响。防止它们失效,也是十分重要的,也需要通过可靠的控制电路和器件的质量来加以保证。
28.附图1中,dv是控制倍压继电器的控制信号,当其为高电压时,如+24v,则倍压继电器动作,其触点或开关闭合,进行倍压转换;mai是控制上电缓冲继电器的控制信号,当其为高电压时,如+24v,则上电缓冲继电器动作,其触点或开关闭合,短接rt1,进行上电缓冲后的正常工作状态转换。
29.附图1中,ec01称为上臂电解电容;ec02也称为下臂电解电容。
30.附图1中,电阻r03(如100k电阻)与r04(如1.2k电阻)串联后并联在ec02电解电容的两端,是分压电路的两个电阻,通过r03与r04的中间连接点可获得ec02下臂电解电容两端的adl1电压检测信号,也称为下臂电容电压检测信号。
31.附图1中,电阻r05(如400k电阻)与r06(如1.2k电阻)串联后并联于+vcc电压及其地的两端,也是分压电路的两个电阻,通过r05与r06的中间连接点连接r07电阻,可获得+vcc电压的检测信号adh,称为直流母线电压检测信号。当然,通过该信号的检测电压值减去下臂电容电压检测信号,同样也可获得ec01上臂电解电容两端的电压计算值或检测信号。
32.附图2是是本实用新型焊机倍压和上电缓冲电路的控制电路原理图。
33.下面对本实用新型相关的控制电路进行组成和工作原理的说明:
34.见附图2,本实用新型焊机倍压和上电缓冲电路的控制电路主要由电阻r1~r12、电容c1~c5、电解电容ec1和ec2、+5v输出的集成稳压器u4、二极管d1和d2、pnp型开关三极管q1和q2(mmbt4403)、光耦u1(包括u1a发光二极管和u1b输出级的三极管)和u2(包括u2a发光二极管和u2b输出级的三极管)(el817d等)、32位微处理器u3(lks32mc033),发光二极管e、l和h,烧写微处理器程序用的jtag插座,11针的插座m,以及+12v和+24v直流电源电压组成。插座m的1脚连接+24v,插座m的2脚连接+24v的地;插座m的3脚,即mai控制信号端,连接三极管q1的集电极,q1的发射极接+24v,q1的基极连接r1、r2,r2的另一端接+24v,r1的另一端连接u1光耦中输出级三极管u1b的集电极,而u1b的发射极接+24v的地,u1光耦中发光二极管u1a的阴极连接r5,r5的另一端连接微处理器u3的15脚,u1a的阳极接+5v;插座m的4脚,即dv控制信号端,连接三极管q2的集电极,q2的发射极接+24v,q2的基极连接r3、r4,r3的另一端接+24v,r4的另一端连接u2光耦中输出级三极管u2b的集电极,而u2b的发射极接+24v的地,u2光耦中发光二极管u2a的阴极连接r6,r6的另一端连接微处理器u3的16脚,u2a的阳极接+5v;插座m的5脚、6脚和7脚,没有连接;插座m的8脚,即adl1下臂电容电压检测采样信号端,连接d1的阳极、r7,d1的阴极接+5v,r7的另一端(即adl2信号)连接c1和微处理器u3的11脚,c1的另一端接地(这个地与+24v的地是不同的,简称为地);插座m的9脚连接+12v电源、r8,r8的另一端连接ec1的正极、u4稳压器的输入端,ec1的负极和u4的接地端接地,u4的输出+5v端连接ec2的正极、c2和c3,ec2的负极、c2和c3的另一端接地;插座m的10脚,即adh直流母线电压检测信号端,连接微处理器u3的19脚、d2的阳极、c4,c4的另一端接地,d2的阴极接+5v;插座m的11脚接地;jtag插座的1脚接+5v,其4脚接地,其2脚连接u3的2脚,其3脚连接u3的1脚,编写好的微处理器控制程序通过烧写器和jtag插座的连接,写入u3中;u3的3脚连接e发光二极管的阴极,e的阳极连接r12,r12的另一端连接+5v,e发光二极管为总的直流母线电压异常故障指示灯;u3的4脚连接c5和r9,c5的另一端接地,r9的另一端接+5v;u3的5脚连接l发光二极管的阴极,l的阳极连接r11,r11的另一端连接+5v,l发光二极管为下臂电容电压的异常故障指示灯;u3的6脚悬空;u3的7脚和8脚接地;u3的9脚接+5v;u3的10脚连接h发光二极管的阴极,h的阳极连接r10,r10的另一端连接+5v,h发光二极管为上臂电容电压的异常故障指示灯;u3的11脚连接adl2信号端,也就是adl1下臂电容电压检测信号的微处理器u3的连接端;u3的15脚输出信号端控制光耦u1的工作状态,最终通过mai信号去控制上电缓冲继电器的工作状态;u3的16脚输出信号端控制光耦u2的工作状态,最终通过dv信号去控制倍压继电器的工作状态;u3的其余脚,如12~14脚、17脚、18脚和20脚,处于悬空。
35.本实用新型焊机倍压和上电缓冲电路的控制电路通过插座m的插头及其控制线,与焊机的其它电路部分,按照上述描述的连接关系,即插座m的1脚接+24v,其2脚接+24v的地,其3脚的输出控制信号mai去控制上电缓冲继电器的工作,其4脚的输出控制信号dv去控制倍压继电器的工作,其8脚通过分压电阻的分压获取adl1下臂电容电压检测采样信号,其9脚接+12v,其10脚通过分压电阻的分压获取adh直流母线电压检测信号,其11脚接地,连接在一起,在u3微处理器控制程序的控制下,可实现逆变焊机的上电缓冲和倍压电路的控制。该控制的大致过程如下:
36.逆变焊机通过电源开关接通输入电源后,上电缓冲电路中的继电器(如jdqa)不动
作,rt1热敏电阻会接入输入回路中限制焊机上电期间的浪涌电流,防止烧坏焊机的电源开关;倍压继电器(如jdq1a)不会动作;输入电源经整流器(如bg1)整流后获得直流电压,此电压再经后级电解电容(如ec01和ec02)的滤波,可变换为较高的直流母线电压;同时,焊机的电源电路会产生+24v、+12v工作电源,于是,本实用新型电路部分也会产生+5v电源,为u3微处理器及其外围的控制电路提供工作电源。在u3微处理器控制软件的作用下,从开始程序运行时刻算起,会进行2秒的软件控制延时,之后,u3微处理器的15脚会输出低电平,使u1a发光二极管发光,u1b三极管导通,可使q1三极管导通,于是,mai控制信号变为近+24v的高电压信号,使上电缓冲电路中的继电器(如jdqa)动作,该继电器的触点或开关短接rt1热敏电阻。之后,会进行0.5秒的软件控制延时。接下来,控制系统会对前面所述的adh和adl2信号进行采样、a/d模数转换,获得直流母线电压、上臂和下臂电解电容的电压采样数据。依据上述采样获得的数据,即可判断焊机接入的供电电源电压是220v(低)电压级别的,还是380v(高)电压级别的。之所以说是某个电压级别的,是因为电网电压是有波动的,不一定是准确的220v或380v。
37.如果adh信号的采样数值大于交流260v对应的数值,或者adl2信号的采样数值大于交流130v对应的数值,那么,控制系统会判定焊机接入的电源电压是属于380v(高)电压级别的,此时,控制系统发出的指令不会使倍压继电器吸合,也就是说,不进行倍压工作。焊机将进行正常逆变等输出控制。
38.否则,控制系统会判定焊机接入的电源电压是属于220v(低)电压级别的,在这种情况下,u3微处理器的15脚会输出高电平,使u1a发光二极管不会发光,u1b三极管截止,可使q1三极管截止,于是,mai控制信号变为低电平信号,使上电缓冲电路中的继电器(如jdqa)不动作,该继电器的触点或开关不会短接rt1热敏电阻。之后,会进行0.1秒的软件控制延时。接下来,u3微处理器的16脚会输出低电平,使u2a发光二极管发光,u2b三极管导通,可使q2三极管导通,于是,dv控制信号变为近+24v的高电压信号,使倍压电路中的继电器(如jdq1a)动作,该继电器的触点或开关jdq1b闭合,实现电路的倍压转换。在此之后,会进行2秒的软件控制延时,之后,u3微处理器的15脚会输出低电平,使u1a发光二极管发光,u1b三极管导通,可使q1三极管导通,使mai控制信号变为近+24v的高电压信号,使上电缓冲电路中的继电器(如jdqa)动作,该继电器的触点或开关短接rt1热敏电阻。同时,焊机将进行正常逆变等输出控制。
39.在上述220v(低)电压级别的电源判定后,首先使上电缓冲电路中的继电器(如jdqa)不动作的目的,是使后面倍压继电器(如jdq1a)的动作在有rt1接入的情况下进行,有利于减小流过倍压继电器的触头或开关(如jdq1b)的电流,防止因电流过大而烧坏此触头或开关。这是有利于保护和提高倍压继电器,以及焊机可靠性的。在倍压转换完成之后,再使上电缓冲电路中的继电器(如jdqa)动作,进入后期的正常逆变控制过程。上述这一点,与一般逆变焊机通电一段时间后上电缓冲电路中的继电器一直处于动作状态,或者说rt1热敏电阻一直处于被短接的状态是完全不同的,后者,其倍压转换是在有较大的电流流过倍压继电器的触头或开关的情况下进行的,因而后者的这种控制方法烧坏倍压继电器的几率是非常高的。这也是一般双电压逆变焊机故障率高的重要原因之一。
40.如果监测到adh信号和adl2信号的采样数值异常,包括上臂电解电容两端的电压计算值异常,控制系统会依据异常的情况,去控制e、l和h指示灯的点亮,实现对总的直流母
线电压异常、下臂电容电压的异常和上臂电容电压的异常的故障指示。通过观察是哪个指示灯点亮,即可知道电路是哪个方面的故障,有利于查找焊机工作中出现的问题,提示用户进行相应地处理。
41.本实用新型的控制电路主要是完成上电缓冲控制、输入电源电压自动识别和倍压转换电路控制等工作。在控制电路的作用下,实现自动识别输入电源电压,并自动转换倍压控制电路;实现上电缓冲电路的控制。最终满足逆变焊机的控制要求,保障焊机工作的可靠性。本焊机的控制电路,经大量的实测和实际应用效果证明,电路的工作可靠性较高,控制性能达到了预期的结果。
42.以上是本实用新型控制电路及其控制功能、连接使用方法的说明。由于本实用新型已经给出了详细的电路原理图,因此,对于有电路阅读能力(或具备相关电路知识)的人来说,是完全可以读懂的。电路图就是一种无声的语言。但是,对于没有电路阅读能力(或不具备相关电路知识)的人来说,即使解释的再多,他们也是难以理解的。鉴于篇幅的关系,本文只能阐述主要的部分,以使读者能够更好地理解相关的工作原理和过程。
43.通过上述说明可见,本实用新型电路有自己独特的设计思路和方法。所设计的控制电路良好性能,是使利用本实用新型制成的焊机产品具有良好工作可靠性的技术优势所在,也是满足焊机产品高可靠性、技术先进性的重要保障。本实用新型专利申请保护的目的就在于保护这种电路的设计。
44.以上内容是结合逆变焊机电路及控制功能对本实用新型所作的详细说明,不能认定本实用新型的具体实施只限于这些说明。对本实用新型所述技术领域的其他技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干其它的推演和变换,这些都应该视为属于本实用新型保护的范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1