三轴超声波金属焊接机的制作方法
1.本实用新型涉及焊接机技术领域,具体是三轴超声波金属焊接机。
背景技术:
2.超声波金属焊接机由于其独特的优势得到迅速应用,超声波焊接是通过超声波换能器将超声频电源提供的电能转换为高频振动的机械能,通过超声波调幅器和焊头将能量传递到焊接件上。
3.而现有超声波金属焊接机在使用过程中,由于与机架之间通过螺栓固定,导致在对产品进行焊接的过程中,需要通过人工手动推送产品进行移动,为此在焊接过程中,需要通过人工对产品进行不断调整,以此避免焊接出现偏差的情况,致使对产品的焊接较为耗时耗力,因此对产品的焊接效率较低,为此我们提出了三轴超声波金属焊接机。
技术实现要素:
4.本实用新型的目的在于:为了实现超声波金属焊接机对产品高效焊接的目的,提供三轴超声波金属焊接机。
5.为实现上述目的,本实用新型提供如下技术方案:三轴超声波金属焊接机,包括机架,所述机架的顶端固定连接有报警指示灯,所述机架的一端内部安装有超声波控制箱,所述机架内壁的一端设置有副支撑架,所述机架的内部设置有移动机构;所述移动机构包括第一伺服模组、第二伺服模组、第三伺服模组、第一伺服电机、第二伺服电机、第三伺服电机以及下降臂;所述第一伺服模组固定连接在副支撑架的一端,所述第三伺服电机固定连接在第一伺服模组远离副支撑架的一端;所述第三伺服模组固定连接在机架远离副支撑架内壁的一端,且与第一伺服模组滑动连接,所述第一伺服电机固定连接在第三伺服模组的一侧,且位于第三伺服电机的下方;所述第二伺服模组滑动连接在第一伺服模组的内部,所述下降臂固定连接在第二伺服模组的一端外壁,所述第二伺服电机固定连接在第二伺服模组的顶端。
6.作为本实用新型再进一步的方案:所述机架的一端外壁安装有控制组件,所述控制组件位于报警指示灯的下方,所述控制组件包括人机界面、控制按钮、视觉键盘。
7.作为本实用新型再进一步的方案:所述下降臂的一侧安装有视觉组件,所述视觉组件包括视觉相机、视觉镜头、视觉光源。
8.作为本实用新型再进一步的方案:所述下降臂的底端通过安装板固定连接有超声波焊接头,所述超声波焊接头通过导线与超声波控制箱电性连接,所述下降臂位于超声波焊接头的一侧安装有冷却吹气管。
9.作为本实用新型再进一步的方案:所述超声波焊接头的顶端安装有压力传感器,所述超声波控制箱、压力传感器、报警指示灯均通过导线与控制组件电性连接,所述第一伺服电机、第二伺服电机、第三伺服电机均通过导线与控制组件电性连接。
10.作为本实用新型再进一步的方案:所述机架的内部固定连接有与副支撑架滑动连
接的第一滑轨,所述第一伺服模组的内部固定连接有与第二伺服模组滑动连接的第二滑轨。
11.作为本实用新型再进一步的方案:所述第一伺服模组的底端固定连接有与第三伺服模组滑动连接的连接板。
12.与现有技术相比,本实用新型的有益效果是:
13.通过设置移动机构,通过固定模具将产品固定在机架的内部,然后在控制组件的电性控制下,通过第一伺服模组、第二伺服模组、第三伺服模组、副支撑架、视觉组件的相互配合,可对产品不同位置的焊点处进行查看,同时将观察的数据传输至控制组件上进行计算,此时通过控制组件根据计算得出的数据,可通过超声波控制箱使超声波焊接头对焊点处进行焊接操作,并重复上述操作,从而实现对产品进行高效焊接的目的。
附图说明
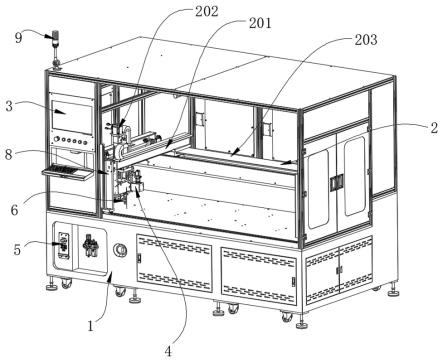
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的第一伺服模组结构示意图;
16.图3为本实用新型的移动机构正视结构示意图;
17.图4为本实用新型的移动机构侧视结构示意图;
18.图5为本实用新型的图3中的a处局部放大示意图。
19.图中:1、机架;2、移动机构;201、第一伺服模组;202、第二伺服模组;203、第三伺服模组;204、第一伺服电机;205、第二伺服电机;206、第三伺服电机;207、下降臂;3、控制组件;4、视觉组件;5、超声波控制箱;6、超声波焊接头;7、压力传感器;8、副支撑架;9、报警指示灯;10、冷却吹气管。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1~图5,本实用新型实施例中,三轴超声波金属焊接机,包括机架1,机架1的顶端固定连接有报警指示灯9,机架1的一端外壁安装有控制组件3,控制组件3位于报警指示灯9的下方,控制组件3包括人机界面、控制按钮、视觉键盘,机架1的一端内部安装有超声波控制箱5,机架1内壁的一端设置有副支撑架8,机架1的内部设置有移动机构2;移动机构2包括第一伺服模组201、第二伺服模组202、第三伺服模组203、第一伺服电机204、第二伺服电机205、第三伺服电机206以及下降臂207;第一伺服模组201固定连接在副支撑架8的一端,第三伺服电机206固定连接在第一伺服模组201远离副支撑架8的一端;第三伺服模组203固定连接在机架1远离副支撑架8内壁的一端,且与第一伺服模组201滑动连接,第一伺服电机204固定连接在第三伺服模组203的一侧,且位于第三伺服电机206的下方;第二伺服模组202滑动连接在第一伺服模组201的内部,下降臂207固定连接在第二伺服模组202的一端外壁,下降臂207的一侧安装有视觉组件4,视觉组件4包括视觉相机、视觉镜头、视觉光源,下降臂207的底端通过安装板固定连接有超声波焊接头6,超声波焊接头6通过导线与超
声波控制箱5电性连接,下降臂207位于超声波焊接头6的一侧安装有冷却吹气管10,第二伺服电机205固定连接在第二伺服模组202的顶端,超声波焊接头6的顶端安装有压力传感器7,超声波控制箱5、压力传感器7、报警指示灯9均通过导线与控制组件3电性连接,第一伺服电机204、第二伺服电机205、第三伺服电机206均通过导线与控制组件3电性连接。
22.在本实施例中:需要特别说明的是:机架1的内部可根据产品的不同安装有不同高度模具,使用本装置时,通过固定模具将产品固定在机架1的内部,然后通过控制组件3启动视觉组件4对产品焊点处进行查看,同时视觉组件4将观察的数据传输至控制组件3上进行计算,此时通过控制组件3根据计算得出的数据,分别启动第一伺服电机204、第二伺服电机205、第三伺服电机206带动丝杆转动,此时需要特别说明:第一伺服电机204、第二伺服电机205、第三伺服电机206的输出端均通过联轴器固定连接有与模组转动连接的丝杆,且模组与丝杆螺纹连接,在此过程中第一伺服模组201通过丝杆在第一伺服电机204的带动下,沿着第三伺服模组203的外壁移动,并带动副支撑架8沿着第一滑轨的外壁进行移动,同时第二伺服模组202通过丝杆在第三伺服电机206的带动下,带动视觉组件4、超声波焊接头6、冷却吹气管10沿着第二滑轨进行移动,当超声波焊接头6移动至焊点的正上方时,此时下降臂207通过丝杆在第二伺服电机205的带动下,带动超声波焊接头6移动至焊点处,此时通过控制组件3可启动超声波控制箱5使超声波焊接头6对焊点处进行焊接操作,并重复上述操作,从而实现对产品进行高效焊接的目的,同时通过压力传感器7可在焊接过程中进行自动焊接压力操作,此时需要特别说明:压力传感器7基于压阻效应,压力直接作用在陶瓷膜片的前表面,使膜片产生微小的形变,厚膜电阻印刷在陶瓷膜片的背面,连接成一个惠斯通电桥,由于压敏电阻的压阻效应,使电桥产生一个与压力成正比的高度线性、与激励电压也成正比的电压信号,标准的信号根据压力量程的不同标定为2.0/3.0/3.3mv/v等,当焊接完成后,通过控制组件3可通过移动机构2带动视觉组件4、超声波焊接头6进行自动复位,并通过报警指示灯9进行亮鸣操作,以便于工人对产品进行更换,并再次进行自动焊接操作。
23.请着重参阅图1~图5,机架1的内部固定连接有与副支撑架8滑动连接的第一滑轨,第一伺服模组201的内部固定连接有与第二伺服模组202滑动连接的第二滑轨。
24.在本实施例中:通过第一滑轨可使副支撑架8在第一伺服模组201的带动下,在机架1的内部进行移动,从而可对第一伺服模组201进行移动支撑。
25.请着重参阅图2~图5,第一伺服模组201的底端固定连接有与第三伺服模组203滑动连接的连接板。
26.在本实施例中:通过连接板可使得第一伺服模组201与第三伺服模组203滑动连接,从而可使得第一伺服模组201沿着第三伺服模组203的外壁进行限位移动。
27.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1