一种用于传感器外壳的自动化组装装置的制作方法
本技术属于传感器组装,具体涉及一种用于传感器外壳的自动化组装装置。
背景技术:
1、目前的汽车传感器外壳由管套和金属线组成,工厂内的组装线首先将金属线焊接好,然后由人工将焊接好的金属线插入管套中,从而形成外壳,然后送入下一组装工序,其中管套底部设有通孔,金属线一端穿过通孔,由于金属线具有一定的弹性作用力,因此金属线在管套内时会对管套施加一定的反作用力,从而固定在管套内。
2、但是对于批量生产传感器的工厂来说,将金属线插入管套中需要消耗大量的人力,并且此人力仅重复简单作业,同时作业效率低。
技术实现思路
1、鉴于现有技术中存在上述问题,本实用新型的目的是提供一种用于传感器外壳的自动化组装装置。
2、本实用新型提供了如下的技术方案:
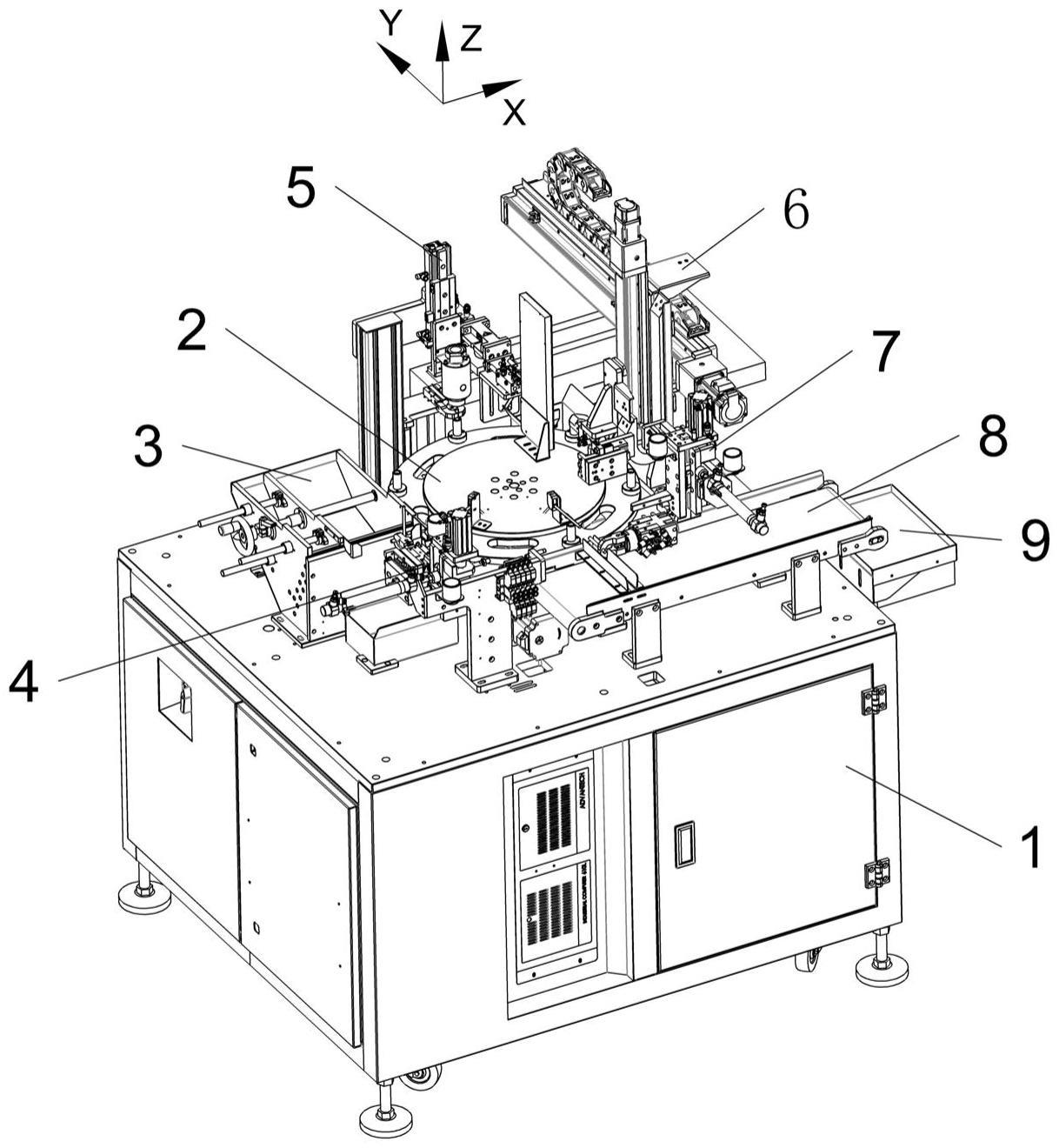
3、一种用于传感器外壳的自动化组装装置,包括柜体,安装在柜体中间位置的工作台,安装在柜体上且绕柜体中心顺时针依次排布的管套上料装置、上料装置、管套除尘装置、针抓取装置和收料装置,位于收料装置一侧且安装在柜体上的输送带,所述输送带远离工作台的一端设有回收盒,位于针抓取装置一侧的针上料装置;所述工作台包含转动盘和固定盘,所述转动盘为六等分分度盘,转动盘除设有套管放置工位、吸尘工位、上针工位和出料工位外,还设有个空工位,且固定盘上对应套管放置工位、吸尘工位、上针工位和出料工位的位置安装有磁性开关,同时所述管套上料装置的结构与收料装置的结构相同。
4、具体的,上料装置包括外壳,若干个固定块和若干个移动块交错置于外壳内、且呈阶梯状下降排列,最内端的移动块与外壳内壁相接触,同时外壳位于最内端的移动块的一端外安装有放置块,且移动块均高于固定块,同时固定块安装在外壳两侧的内壁上,所述固定块与移动块相接触,且若干个移动块安装在一起,同时移动块安装在气缸一上,气缸一的初始状态是满行程状态;最外端的固定块通过导向板与外壳相连,且最外端的固定块的顶端低于导向板、或顶端与导向板相连,同时导向板安装在外壳内,从而当人工往外壳内送入管套时,管套会顺着导向板的导向到达最外端的固定块处。
5、具体的,上料装置还包括置于外壳内的限位板,用于限制管套的长度,丝杠穿过限位板,同时所述丝杠与移动座螺纹连接,所述移动座安装在限位板上,所述丝杠远离外壳的一端安装有手柄,同时限位板两端安装有导向轴,导向轴穿过安装在外壳上的法兰。
6、具体的,管套上料装置包括底座,安装在底座上的直线导轨二,直线导轨二的滑块一端安装有气缸二,且直线导轨二的滑块上安装有底板,所述底板上安装有直线导轨三,气缸三的活塞杆一端安装在底板底面上,连接板安装在直线导轨三上,同时连接板也安装在气缸三的缸体上,而气缸四安装在连接板上,旋转夹爪气缸安装在气缸四上。
7、具体的,工作台包括电机,安装在电机上的齿轮一,固定盘通过固定轴安装在固定座一上,且固定轴穿过旋转轴,所述旋转轴通过轴承活动安装在固定座一和固定轴上,转动盘安装在所述旋转轴上,齿轮二安装在旋转轴外,所述齿轮一与齿轮二相啮合。
8、具体的,管套除尘装置包括固定座二,气缸五安装在固定座二上,直线导轨一安装在气缸五上,真空吸尘器通过板既连接在直线导轨一上又连接在气缸五上,气动夹爪一通过安装座安装在固定座二上,所述真空吸尘器连接有真空泵。
9、具体的,针抓取装置包括座,安装在座上的单轴机器人一,安装在单轴机器人一上的单轴机器人二,安装在单轴机器人二上的气动夹爪二。
10、本实用新型的有益效果是:
11、本装置能够依次自动完成上料、吹尘、上针和回收的一系列作业,减少人力的消耗,且保证了作业效率和作业质量。
技术特征:
1.一种用于传感器外壳的自动化组装装置,包括柜体(1),安装在柜体(1)中间位置的工作台(2),
2.根据权利要求1所述的一种用于传感器外壳的自动化组装装置,其特征在于,上料装置(3)包括外壳(301),若干个固定块(303)和若干个移动块(302)交错置于外壳(301)内、且呈阶梯状下降排列,最内端的移动块(302)与外壳(301)内壁相接触,同时外壳(301)位于最内端的移动块(302)的一端外安装有放置块(312),且移动块(302)均高于固定块(303),同时固定块(303)安装在外壳(301)两侧的内壁上,所述固定块(303)与移动块(302)相接触,且若干个移动块(302)安装在一起,同时移动块(302)安装在气缸一(304)上,气缸一(304)的初始状态是满行程状态;最外端的固定块(303)通过导向板(305)与外壳(301)相连,且最外端的固定块(303)的顶端低于导向板(305)、或顶端与导向板(305)相连,同时导向板(305)安装在外壳(301)内,从而当人工往外壳(301)内送入管套时,管套会顺着导向板(305)的导向到达最外端的固定块(303)处。
3.根据权利要求2所述的一种用于传感器外壳的自动化组装装置,其特征在于,上料装置(3)还包括置于外壳(301)内的限位板(306),用于限制管套的长度,丝杠(307)穿过限位板(306),同时所述丝杠(307)与移动座(309)螺纹连接,所述移动座(309)安装在限位板(306)上,所述丝杠(307)远离外壳(301)的一端安装有手柄(308),同时限位板(306)两端安装有导向轴(310),导向轴(310)穿过安装在外壳(301)上的法兰(311)。
4.根据权利要求1所述的一种用于传感器外壳的自动化组装装置,其特征在于,管套上料装置(4)包括底座(402),安装在底座(402)上的直线导轨二(403),直线导轨二(403)的滑块一端安装有气缸二(401),且直线导轨二(403)的滑块上安装有底板(404),所述底板(404)上安装有直线导轨三(405),气缸三(406)的活塞杆一端安装在底板(404)底面上,连接板(407)安装在直线导轨三(405)上,同时连接板(407)也安装在气缸三(406)的缸体上,而气缸四(408)安装在连接板(407)上,旋转夹爪气缸(409)安装在气缸四(408)上。
5.根据权利要求1所述的一种用于传感器外壳的自动化组装装置,其特征在于,工作台(2)包括电机(208),安装在电机(208)上的齿轮一(209),固定盘(202)通过固定轴(212)安装在固定座一(213)上,且固定轴(212)穿过旋转轴(211),所述旋转轴(211)通过轴承活动安装在固定座一(213)和固定轴(212)上,转动盘(201)安装在所述旋转轴(211)上,齿轮二(210)安装在旋转轴(211)外,所述齿轮一(209)与齿轮二(210)相啮合。
6.根据权利要求1所述的一种用于传感器外壳的自动化组装装置,其特征在于,管套除尘装置(5)包括固定座二(501),气缸五(502)安装在固定座二(501)上,直线导轨一(503)安装在气缸五(502)上,真空吸尘器(504)通过板既连接在直线导轨一(503)上又连接在气缸五(502)上,气动夹爪一(505)通过安装座(506)安装在固定座二(501)上,所述真空吸尘器(504)连接有真空泵。
7.根据权利要求1-6中任一项所述的一种用于传感器外壳的自动化组装装置,其特征在于,针抓取装置(6)包括座(604),安装在座(604)上的单轴机器人一(601),安装在单轴机器人一(601)上的单轴机器人二(602),安装在单轴机器人二(602)上的气动夹爪二(603)。
技术总结
本技术公开了一种用于传感器外壳的自动化组装装置,包括柜体,工作台,安装在柜体上且绕柜体中心顺时针依次排布的管套上料装置、上料装置、管套除尘装置、针抓取装置和收料装置,位于收料装置一侧且安装在柜体上的输送带,所述输送带远离工作台的一端设有回收盒,位于针抓取装置一侧的针上料装置;所述工作台包含转动盘和固定盘,所述转动盘为六等分分度盘,转动盘除设有套管放置工位、吸尘工位、上针工位和出料工位外,还设有2个空工位,且固定盘上对应套管放置工位、吸尘工位、上针工位和出料工位的位置安装有磁性开关。本装置能够依次自动完成上料、吹尘、上针和回收的一系列作业,减少人力的消耗,且保证了作业效率和作业质量。
技术研发人员:孙家良,孙健
受保护的技术使用者:南京微伽自动化技术有限公司
技术研发日:20221124
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!