一种自动拉铆装置的制作方法
本技术属于自动化设备领域,具体而言,涉及一种自动拉铆装置。
背景技术:
1、拉铆首先根据铆钉芯棒直径选定铆枪头的孔径,并调整导管位置,用螺母锁紧,然后将铆钉穿入钉孔,套上拉铆枪,夹住铆钉芯棒,枪端顶住铆钉头部,开动铆枪,依靠压缩空气产生的向后拉力,使心棒的凸肩部分对铆钉形成压力,铆钉出项压缩变形并形成铆钉头,同时,芯棒由于缩颈处断裂而被拉出,铆接完成。
2、目前,采用的最主要的方式是操作人员通过风动(或手动)拉铆枪进行拉铆或者采用拉铆设备进行拉铆作业。
3、而操作人员通过风动(或手动)拉铆枪进行拉铆时,不仅费时费力,效率低,而且随着人力成本的不断提高,手工安装增加了相关生产企业的制造成本;而采用拉铆设备进行拉铆作业,由于此种设备往往仍存在需要通过操作人员辅助的方式进行上料和下料,依然存在生产效率低的问题,而在上下料的过程中,操作人员稍有不慎就可能被设备弄伤,存在着安全隐患。
技术实现思路
1、为了解决现有技术存在的问题,本实用新型旨在提供一种自动拉铆装置,以实现自动化拉铆,提高效率的同时,减少操作人员的参与,降低成本。
2、为达到上述技术目的及效果,本实用新型通过以下技术方案实现:
3、一种自动拉铆装置,包括用于供给物料的供料单元、用于放置及组装物料的移载单元、用于拉铆作业的拉铆单元和用于上料的机器人夹爪单元,所述供料单元和所述机器人夹爪单元设置在所述移载单元的一侧,通过所述机器人夹爪单元将所述供料单元中的物料移动至所述移载单元内;所述拉铆单元横跨在所述移载单元的上方,通过所述拉铆单元对移动至所述移载单元内的物料进行拉铆。
4、进一步的,设置有三组所述移载单元,三组所述移载单元并排设置,所述拉铆单元横跨在三组所述移载单元的上方。
5、进一步的,所述移载单元由第一导轨组件和设置在所述第一导轨组件滑块上的移载工装组成,所述移载工装通过所述第一导轨组件的驱动可在所述第一导轨组件上前后移动。
6、进一步的,所述拉铆单元包括有第二导轨组件和设置在所述第二导轨组件滑块上的拉铆机构,所述拉铆机构通过所述第二导轨组件的驱动可在所述第二导轨组件上左右移动。
7、进一步的,所述拉铆机构有一固定框架、升降气缸、拉铆滑轨和拉铆抢,所述固定框架的后端通过一安装板固定在所述第二导轨组件的滑块上,所述升降气缸通过对应的支撑座固定在所述固定框架的前端,所述拉铆滑轨的轨道固定在所述固定框架的前端,所述升降气缸的活塞杆通过一连接板与所述拉铆滑轨的滑块连接,通过所述升降气缸活塞杆的伸出或收缩可驱动所述连接板通过所述拉铆滑轨上下移动,所述拉铆抢通过对应的支撑座固定在所述连接板的前端下部。
8、进一步的,所述供料单元1包括有振料盘和用于支撑所述振料盘的支撑平台。
9、进一步的,所述机器人夹爪单元包括一关节机器人,所述关节机器人的底座固定在一支撑框架上,所述关节机器人的末端设置有一用于抓取物料的夹爪机构。
10、进一步的,所述夹爪机构包括一与所述关节机器人的末端连接的连接盘,所述连接盘的下端面通过对应的支撑座设置有若干个用于夹取物料的夹爪气缸。
11、本实用新型的有益效果如下:本实现新型通过机器人夹爪单元实现物料的自动上料,并配合移载单元和拉铆单元,实现了自动拉铆,减少了操作人员,提高了生产效率,降低了成本;其次,通过多组配置,进一步提高了生产效率及设备的使用率。
12、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
技术特征:
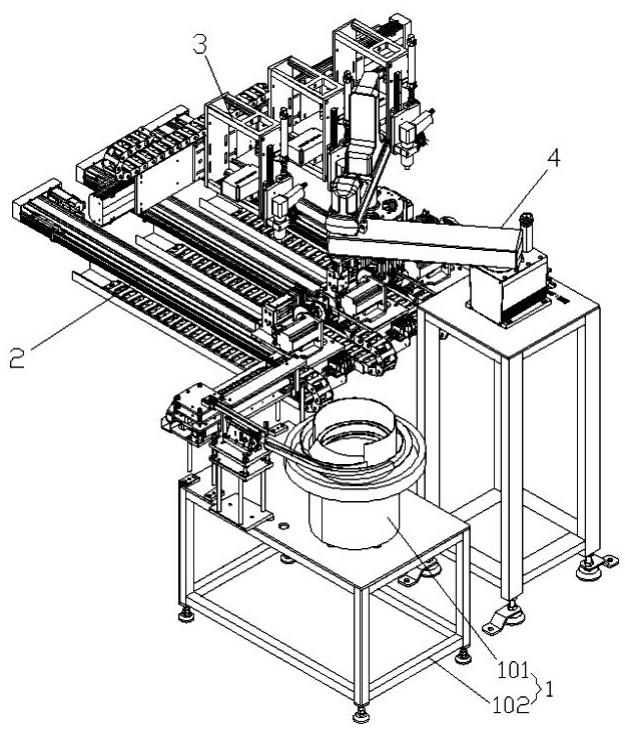
1.一种自动拉铆装置,其特征在于:包括用于供给物料的供料单元(1)、用于放置及组装物料的移载单元(2)、用于拉铆作业的拉铆单元(3)和用于上料的机器人夹爪单元(4),所述供料单元(1)和所述机器人夹爪单元(4)设置在所述移载单元(2)的一侧,通过所述机器人夹爪单元(4)将所述供料单元(1)中的物料移动至所述移载单元(2)内;所述拉铆单元(3)横跨在所述移载单元(2)的上方,通过所述拉铆单元(3)对移动至所述移载单元(2)内的物料进行拉铆。
2.根据权利要求1所述的自动拉铆装置,其特征在于:设置有三组所述移载单元(2),三组所述移载单元(2)并排设置,所述拉铆单元(3)横跨在三组所述移载单元(2)的上方。
3.根据权利要求2所述的自动拉铆装置,其特征在于:所述移载单元(2)由第一导轨组件(21)和设置在所述第一导轨组件(21)滑块上的移载工装(22)组成,所述移载工装(22)通过所述第一导轨组件(21)的驱动可在所述第一导轨组件(21)上前后移动。
4.根据权利要求1所述的自动拉铆装置,其特征在于:所述拉铆单元(3)包括有第二导轨组件(31)和设置在所述第二导轨组件(31)滑块上的拉铆机构(32),所述拉铆机构(32)通过所述第二导轨组件(31)的驱动可在所述第二导轨组件(31)上左右移动。
5.根据权利要求4所述的自动拉铆装置,其特征在于:所述拉铆机构(32)有一固定框架(321)、升降气缸(322)、拉铆滑轨(323)和拉铆抢(324),所述固定框架(321)的后端通过一安装板固定在所述第二导轨组件(31)的滑块上,所述升降气缸(322)通过对应的支撑座固定在所述固定框架(321)的前端,所述拉铆滑轨(323)的轨道固定在所述固定框架(321)的前端,所述升降气缸(322)的活塞杆通过一连接板(325)与所述拉铆滑轨(323)的滑块连接,通过所述升降气缸(322)活塞杆的伸出或收缩可驱动所述连接板(325)通过所述拉铆滑轨(323)上下移动,所述拉铆抢(324)通过对应的支撑座固定在所述连接板(325)的前端下部。
6.根据权利要求1所述的自动拉铆装置,其特征在于:所述供料单元(1)包括有振料盘(101)和用于支撑所述振料盘(101)的支撑平台(102)。
7.根据权利要求1所述的自动拉铆装置,其特征在于:所述机器人夹爪单元(4)包括一关节机器人(41),所述关节机器人(41)的底座固定在一支撑框架(42)上,所述关节机器人(41)的末端设置有一用于抓取物料的夹爪机构(43)。
8.根据权利要求7所述的自动拉铆装置,其特征在于:所述夹爪机构(43)包括一与所述关节机器人(41)的末端连接的连接盘(431),所述连接盘(431)的下端面通过对应的支撑座设置有若干个用于夹取物料的夹爪气缸(432)。
技术总结
本技术公开了一种自动拉铆装置,包括用于供给物料的供料单元、用于放置及组装物料的移载单元、用于拉铆作业的拉铆单元和用于上料的机器人夹爪单元,所述供料单元和所述机器人夹爪单元设置在所述移载单元的一侧,通过所述机器人夹爪单元将所述供料单元中的物料移动至所述移载单元内;所述拉铆单元横跨在所述移载单元的上方,通过所述拉铆单元对移动至所述移载单元内的物料进行拉铆。本技术通过机器人夹爪单元实现物料的自动上料,并配合移载单元和拉铆单元,实现了自动拉铆,减少了操作人员,提高了生产效率,降低了成本;其次,通过多组配置,进一步提高了生产效率及设备的使用率。
技术研发人员:许英南,马全成,任慈
受保护的技术使用者:苏州和瑞科智能装备有限公司
技术研发日:20221208
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!