用于冲压接合的装置的制作方法
背景技术:
1、对于用于变形地加工工件的工具、用于安置诸如螺栓或螺母的连接元件或功能元件的铆接钳或冲铆钳或接合钳等装置,针对工业应用设计了各种不同的机器方案。这些机器方案有利地还涉及工件和/或构件的供给和进一步移动。这种用于作用于工件部分或用于冲压接合(durchsetzfügen)的装置在下文中通常也称为接合钳。
2、功能元件优选地是压入元件,在安置于工件上的状态下,其具有外部的附加功能,例如连接部分或固定部分,比如用于将连接部分或固定部分与另一部分连接的外螺纹。
3、上述布置例如可以分为以下应用:
4、-机器人上的机器人引导的接合工具,其中,接合工具由机器人引导至构件;
5、-机器人馈送的接合钳,其中,构件位于机器人上并由机器人引导至接合工具;
6、-手动馈送的接合钳;
7、-机器集成的接合钳,其中,接合钳是固定的,或者可在空间限定的运动轴上移动,并且其中,构件例如通过传送系统比如回转工作台或线性传送系统予以进给和/或移除。
技术实现思路
1、本发明的目的是,改进开头部分提到的装置或接合钳。特别地,要以简单的方式消除这种装置的空行程问题。此外,应尽量减少因频繁发生的临界周期时间而造成的缺点。临界周期时间的特征尤其在于,接合钳朝向构件的相对较长的进入时间或接近时间和/或接合钳远离构件的相对较长的空行程时间。
2、该目的由独立权利要求实现。从属权利要求提出了本发明的有利且有益的改进。
3、本发明基于一种用于冲压接合构件或用于将接合元件或功能元件安置在构件上的装置,其包括保持部分和基体,利用该保持部分能够将该装置定位在环境中的接纳部上,该基体通过支承点支承在保持部分上,并且其中,具有底模元件的底模单元和与底模单元对置的具有冲头的冲头单元接纳在基体上,其中,设置驱动单元用于移动冲头和/或底模元件,该驱动单元沿装置的接合轴线可逆地驱动可线性移动的与冲头或底模元件耦联的执行元件,以便作用于存在于冲头单元和底模单元之间的构件。
4、在下文中,等效地使用术语“接合钳”来代替术语“装置”,并且特别地不局限于接合。
5、本发明的本质在于,基体能够经由支承点相对于保持部分移动,并且其中,执行元件和保持部分之间的控制设备被设计成,根据由于执行元件的被驱动的运动而导致的、执行元件沿着接合轴线的位置,预定基体相对于保持部分的位置。控制设备形成机械的耦联器,经由该机械耦联器,执行元件、例如具有活塞-缸-单元的驱动单元的工作活塞优选永久地与保持部分、例如保持支架或机架连接。
6、利用控制设备能够在执行元件的被驱动的线性运动与基体相对于保持部分的运动之间提供运动耦联。执行元件的线性运动优选地相对于固定的部分发生,执行元件可移动地支撑在该固定的部分上。固定的部分例如是包围执行元件的壳体,并且在壳体和执行元件之间具有滚动轴承设备。
7、有利地,装置或基体的例如与冲头侧和/或底模侧连接的一部分的补偿运动可以与装置的或接合钳的工作冲程同时进行。补偿运动有利地通过冲头的驱动运动和/或通过底模元件的驱动运动来执行。补偿运动尤其是与驱动运动强制耦联的运动。在此优选的情况是,驱动单元与基体一起移动。
8、利用所提出的用于冲压接合或用于安置功能元件或接合元件的装置,例如在机器集成的装置或接合钳中满足了实现基体的优化的运动的要求,该运动特别地包括补偿运动。
9、对于机器集成的装置,通常要求能够使得优选整个接合钳在接合方向上或至少几乎在接合方向上移动。由于需要将接合钳移出底模模具(工件支撑在该底模模具上),或者由于构件或构件保持器的空行程以便为工件的后续传送运动提供自由通路,所以经常出现这种需求。由此可以实现将底模单元和/或冲头单元远离构件的空行程,其中,该构件优选地是静止的。优选地,整个装置远离构件的空行程与冲头单元远离构件的空行程和/或底模单元远离构件的空行程的同时进行。
10、保持部分或保持支架或机架优选地是整个机器(例如整个装置)的集成的组成部分。
11、利用根据本发明的装置,还可以组合地满足经常出现的要求,例如将接合钳一次性进入到构件中和/或进入构件中或上。还可以有利地组合地实现在各个加工步骤之间以相对较小的空行程执行多个接合过程,和/或使接合钳移出或移离构件,和/或转移到下一个构件进行操作。
12、另外,采用本发明可以优选地在接合过程期间执行装置或接合钳相对于构件的规定的运动。就驱动而言,这特别是在由于更换冲头单元和底模单元而反转接合方向的情况下是有利的或必要的。优选或必要的是,构件在接合过程期间保持在空间上不移动。对此优选的是,在接合过程期间,接合钳沿着冲头或铆钉、功能元件或接合元件穿入构件中的路径同步地反向运动。反向运动尤其在方向和/或量上是同步的。
13、采用本发明尤其可实现以下优点:
14、-由于作为一方面的冲头或底模元件和作为另一方面的基体或其他部分同时运动,所以时间损失最小,直至没有时间损失;
15、-补偿运动或基体运动所需的控制成本较少或无需控制成本;
16、-没有显著的或实际相关的额外能源需求或能源消耗;
17、-因为通过例如接合钳的部分打开,与较大程度的打开或完全打开相比,进一步的时间优势或更短的周期时间,周期时间可进一步优化或缩短,无论冲头还是基体都进行部分行程或局部行程,这通过耦联运动或通过补偿运动或与驱动运动耦联地运动的部件的运动实现;
18、-在技术和结构上简单且节省空间或紧凑的解决方案;
19、-经济上有利或便宜;
20、-相对低的出错率。
21、保持部分例如是固定的,例如接纳在建筑物的一部分上。替代地,保持部分例如可移动地位于机器人手臂上。该构件、例如板状的工件例如是单层或多层的,或由多层材料组成。
22、执行元件优选地是线性运动元件,例如活塞-缸-驱动器的一部分,例如装置的或接合钳的工作活塞。驱动单元可选地特别是液压气动的、气动的、液压的和/或电的驱动单元。电驱动单元优选地包括电动机,优选电的主轴驱动器。
23、有利地,控制设备包括导轨和可沿着导轨移动的引导机构、优选地可沿着导轨移位的引导机构。导轨可以为曲线引导的引导机构提供引导曲线。利用优选曲线引导的或路径引导的控制设备,在执行元件或冲头或底模元件的驱动运动与保持部分之间进行耦联。由此根据执行元件的运动,优选地预定特别是基体相对于保持部分的运动或位置。由此特别是根据冲头或底模元件的所历经的移动路径,并且因此根据冲头和/或底模元件的被驱动的、可移动的自由端与构件的间距,能够设置基体的补偿运动。
24、由此特别地可以在构件实际变形之前和/或之后有利地规定由基体的运动预定的补偿运动,例如基体围绕其在保持部分上的支承点的枢转运动,并且因此有利地规定冲头单元和/或底模单元的补偿运动。补偿运动特别地与冲头和/或底模元件的驱动运动相协调。优选地,基体的运动路径和运动位置能够精确地在空间上和时间上可重复地来设置,并且特别地能够与驱动运动协调。优选地沿着导轨在两个相反的方向上进行协调。这里也可行的是,控制设备经过设计,使得在执行元件的运动期间,即当驱动单元运行时,存在基体相对于保持部分不发生运动的阶段。于是根据通常的接合过程,在底模单元静止且围绕冲头的压紧器静止的情况下,在例如冲头和构件之间就只有相对运动了。
25、一个优点是,导轨形成在保持部分上。原则上,保持部分可以是一个、两个或更多个部分,优选是一个部分。例如,保持部分的面向具有执行元件的驱动单元的部分可以具有导轨。保持部分的具有导轨的部分例如背离保持部分的固定在固定设备上或可空间移动的机器人手臂上的部分。
26、导轨适当地匹配,例如作为特别细长的单重或双重或多重的弯曲轨道,使得与导轨匹配的引导元件,例如销、滚子或螺栓,在导轨中连续地引导,平滑地滑动或可均匀且顺利地移动。
27、控制设备有利地包括滑槽引导件。滑槽引导件优选地包括具有传动元件的滑槽控制器。滑槽引导件例如包括保持部分上的导轨和沿导轨引导的可移动的传动元件,所述滑槽引导件易于提供、节省空间、稳定且有利于可靠地引导运动。导轨引导的传动元件优选是执行元件上的引导机构。导轨优选地是例如呈细长孔形式的凹口、直的和/或弯曲的和/或具有弯折的走向,例如为薄的扁平材料,比如一段金属板。优选地,导轨的相应对齐的部分形成在两个对置的、优选平行定向的金属板部分中,特别是恰好两个金属板部分中,这两个金属板部分在金属板部分的法线方向上间隔开并且具有在它们之间的自由中间区域。
28、导轨至少部分地在其走向上例如不连续地和/或连续地弯曲。
29、例如,导轨、例如滑槽导轨以这样的方式协调,使得在接合过程或安置过程中避免或几乎避免了基体的运动或者冲头和/或底模单元或者底模单元的底模元件相对于构件的运动。
30、如果控制设备根据肘节杆原理设计,则会产生另一个优点。由此可以有利地提供杠杆力和杠杆力矩。由此可有利地提供执行元件和基体之间的运动耦联。优选地,可采用控制设备提供的、在执行元件的驱动线性运动与基体相对于保持部分的运动之间的运动耦联根据肘节杆耦联的原理来设计。
31、还有利的是,控制设备包括与执行元件连接的引导机构。引导机构优选牢固地并且优选刚性地与执行元件连接。优选地在外侧呈球状或凸形的引导机构,例如销、滚子、小齿轮、摩擦轮或螺栓,沿着导轨、例如滑槽引导件的轨道移动。导轨具有例如平坦的或轮廓化的、例如齿廓形状的部分,其与引导机构的外侧作用接触。根据执行元件运动,优选为线性运动,引导机构可利用驱动单元而线性移动或者牢固地与执行元件耦联而移动。
32、支承点有利地包括旋转轴承。旋转轴承能够容易地、节省空间地且稳定地设置。
33、由旋转轴承形成的旋转轴线优选地垂直于接合轴线,或者垂直于可线性移动的执行元件的移动方向。旋转轴承例如包括细长的轴承销,其例如可松开地通过在基体和/或保持部分上的开口配合,或者例如通过与轴承销匹配的轴承开口或优选地通过两个或更多个彼此间隔开的匹配的轴承开口配合。至少一个轴承开口优选地存在于保持部分中。旋转轴承优选设计为滑动轴承或滚动轴承。例如,旋转轴承包括作为轴承销的螺钉,该螺钉例如可轴向地穿过彼此对齐的开口并且可轴向地固定,例如利用拧紧的螺母固定。
34、由于在被驱动的冲头运动和/或底模运动期间,执行元件随着基体在支承点处相对于保持部分的例如枢转运动而运动,因此不排除接合轴线的空间定向或倾斜度发生变化的运动阶段。
35、根据有利的变型,支承点包括轴向轴承。保持部分例如保持支架或机架与基体例如反力支架之间的支承点优选为包括例如可线性移动的滑架的轴向轴承。在基体在保持部分上的支承点处,例如可以预定相对于空间固定的空间轴线倾斜的线性运动。轴向轴承也称为纵向轴承、压力轴承或推力轴承。
36、根据本发明的一种改型,设置卸载设备用于控制设备的机械卸载。由此可以将作用到控制设备的构件例如导轨和/或沿着导轨可移动的引导机构上的力和/或力矩减小到不危险的范围,使得控制设备的部件仅发生可容忍的摩擦效应和/或不发生永久的或塑性的变形。
37、卸载设备优选地包括附加元件,其特别地抵消重力的影响。这种元件提供力和/或力矩,并且例如包括弹簧或具有气动气缸和气动-活塞的气动设备和/或液压设备。由于凸形形状,可以以简单且稳定的方式形成引导机构。另外,引导机构因此在引导机构和导轨的部分之间的摩擦影响方面被有利地设计。可以有利地最小化或避免引导机构在导轨中运动期间在导轨中的歪斜、冲撞或卡住。
38、引导机构的外部优选为球形,或者例如横截面为圆形、椭圆形或圆柱形。引导机构例如被设计为滚轮、辊子、螺栓或销。
39、控制设备有利地被设计成使得基体相对于保持部分的位置在冲压接合过程期间或在设定过程期间保持不变。因此,这通常仅是分阶段的情况,或者不是在被驱动行进的冲头或执行元件的整个时间内的情况。由此可以优化所希望的工作控制。特别地,在冲头或底模元件的被驱动的运动期间,基体例如围绕构件静止的阶段也是可能的,例如以便连续地固定和/或支撑构件。
40、还有利的是,控制设备被设计成使得在冲压接合过程期间或在安置过程期间,底模单元的移动方向和移动量与冲头的移动方向和移动量相反。例如,这适用于底模单元存在于驱动单元或工作活塞的作用侧上的情况,或者如果在底模单元侧上发生驱动或者其被驱动。于是,底模单元位于执行元件的一侧,或者执行元件与被驱动移动的底模部件连接。
41、在接合或安置过程期间底模单元的时间-距离-移动曲线至少几乎对应于冲头的相反定向的移动曲线。由此例如实现了使得构件相对于保持部分或机架以及基体或反力支架至少几乎保持静止。
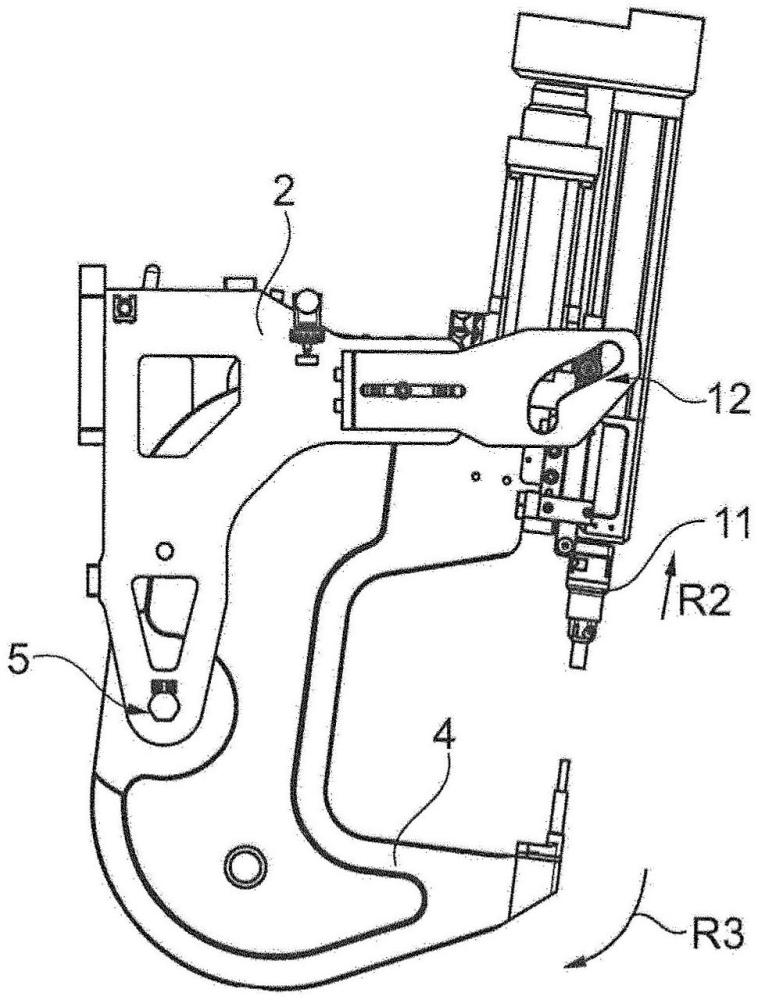
42、最后,有利的是,该装置被设计为具有c形弓架的接合钳。这也适用于本发明的所有其他装置。这种布置是经过考验的设计。例如,c形弓架接合钳被固定在墙壁上或可固定在机器人手臂上,并且可在空间上移动。c形弓架至少基本上形成基体。
- 还没有人留言评论。精彩留言会获得点赞!