一种锅筒焊接机器人的补偿连接装置的制作方法
1.本发明涉及锅筒焊接用机器技术领域,尤其涉及一种锅筒焊接机器人的补偿连接装置。
背景技术:
2.锅筒是水管锅炉中用以进行汽水分离和蒸汽净化,组成水循环回路并蓄存锅水的筒形压力容器。锅筒主要由两个半径为0.5m至1.2m的刚性筒体和数千根半径为44mm至55mm换热管构成。由于锅筒与换热管连接处必须完全密闭,因此需要在锅筒内沿着换热管外壁进行环缝焊接。传统的人工焊接需要多名焊工轮流在刚性筒体内逐一进行焊接,此种方式不仅耗费人力,效率低,且约束条件较多,为了能够提高焊接效率,因此采用机器人焊接。
3.在锅筒内使用机器人焊接,难点在于需要准确的对不同位置的管孔进行定位,机器人在焊接过程中需要先移动定位轴后,将定位轴伸入待焊接的换热管内,以定位轴为焊枪的环缝中心进行环缝焊接,然而在锅筒中的曲面空间无法保证每一根换热管都是垂直于曲面内壁,存在有一定的偏差,进而定位轴在多次定位后,因误差累积,则会使机器人的定位轴的轴线无法与换热管的轴线重合,使得定位轴出现卡死或者焊枪的环缝中心偏移,从而导致机器人焊接出现虚焊、漏焊等情况。
技术实现要素:
4.本发明所要解决的技术问题是:提供一种锅筒焊接机器人的补偿连接装置,能够使机器人的定位轴的轴线与待焊接的换热管的轴线重合,保证环缝焊接质量。
5.为了解决上述技术问题,本发明采用的技术方案为:一种锅筒焊接机器人的补偿连接装置,包括柔顺机构和气缸;所述柔顺机构包括安装板、送线组件、限位套和柔性连接件;
6.所述安装板沿厚度方向两侧分别设置有送线组件和限位套;所述送线组件具有延伸至安装板设置限位套一侧的拉绳;
7.所述柔性连接件的一端分别与拉绳和所述锅筒焊接机器人的定位轴连接,所述柔性连接件的另一端为活动端,所述活动端可伸入限位套内;
8.当所述活动端伸入限位套内时,所述柔性连接件无法发生摆动;当所述活动端伸出限位套时,所述柔性连接件可发生摆动;
9.所述气缸的活动端与安装板连接。
10.本发明的有益效果在于:将柔顺机构与锅筒焊接机器人的定位轴连接,在定位过程中,由气缸驱动活动端动作使柔顺机构和定位轴靠近待焊接换热管,然后利用送线组件放出拉绳,使柔性连接件和定位轴在重力作用下继续朝向待焊接换热管移动,在柔性连接件的活动端伸出限位套后,定位轴利用柔性连接件的摆动,定位轴能够进行纠偏补偿,进而让定位轴的轴线与待焊接换热管的轴线重合,以保证锅筒焊接机器人对换热管的环缝焊接质量。
附图说明
11.图1为本发明在具体实施方式中的一种锅筒焊接机器人的补偿连接装置的应用场景结构示意图;
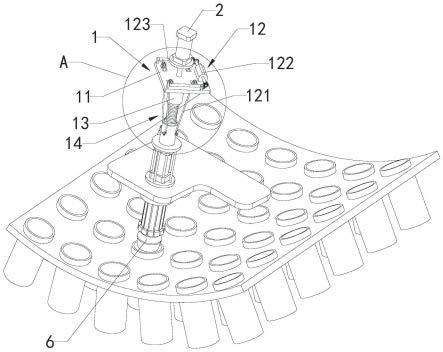
12.图2为图1一种锅筒焊接机器人的补偿连接装置的a部放大图;
13.标号说明:
14.1、柔顺机构;11、安装板;111、通孔;112、牵引轮;
15.12、送线组件;121、拉绳;122、电机;123、卷线轴;
16.13、限位套;
17.14、柔性连接件;141、端盖;142、拉伸弹簧;143、连接杆;
18.2、气缸;3、穿线环;4、第一斜齿轮;5、第二斜齿轮;6、定位轴。
具体实施方式
19.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
20.请参照图1和图2所示,本发明一种锅筒焊接机器人的补偿连接装置,包括柔顺机构1和气缸2;所述柔顺机构1包括安装板11、送线组件12、限位套13和柔性连接件14;
21.所述安装板11沿厚度方向两侧分别设置有送线组件12和限位套13;所述送线组件12具有延伸至安装板11设置限位套13一侧的拉绳121;
22.所述柔性连接件14的一端分别与拉绳121和所述锅筒焊接机器人的定位轴6连接,所述柔性连接件14的另一端为活动端,所述活动端可伸入限位套13内;
23.当所述活动端伸入限位套13内时,所述柔性连接件14无法发生摆动;当所述活动端伸出限位套13时,所述柔性连接件14可发生摆动;
24.所述气缸2的活动端与安装板11连接。
25.从上述描述可知,本发明的有益效果在于:将柔顺机构1与锅筒焊接机器人的定位轴6连接,在定位过程中,由气缸2驱动活动端动作使柔顺机构1和定位轴6靠近待焊接换热管,然后利用送线组件12放出拉绳121,使柔性连接件14和定位轴6在重力作用下继续朝向待焊接换热管移动,在柔性连接件14的活动端伸出限位套13后,定位轴6利用柔性连接件14的摆动,定位轴6能够进行纠偏补偿,进而让定位轴6的轴线与待焊接换热管的轴线重合,以保证锅筒焊接机器人对换热管的环缝焊接质量。
26.请参照图1和图2所示,进一步地,所述送线组件12还包括电机122和卷线轴123;所述卷线轴123与电机122的输出端传动连接,所述拉绳121卷绕在卷线轴123上。
27.由上述描述可知,利用电机122驱动卷线轴123转动可以快速的将拉绳121收起与放出,从而有效的控制柔性连接件14的活动端进出限位套。
28.请参照图2所示,进一步地,所述安装板11上设置有供拉绳121穿过的通孔111。
29.由上述描述可知,安装板11上设置有供拉绳121穿过的通孔111能够减少拉绳121的使用量。
30.请参照图2所示,进一步地,所述安装板11设置送线组件12的一侧设置有牵引轮112,所述牵引轮112靠近通孔111,所述拉绳121与所述牵引轮112的轮面接触。
31.由上述描述可知,利用牵引轮112支撑起拉绳121,使拉绳121不会与安装板11接
触,以避免送线组件12在收放线过程中,拉绳121与安装板11之间发生摩擦。
32.请参照图2所示,进一步地,所述柔性连接件14包括端盖141、拉伸弹簧142和连接杆143;所述端盖141与拉伸弹簧142的一端连接,所述拉伸弹簧142的另一端与连接杆143连接,所述拉伸弹簧142可伸入限位套13内,所述连接杆143的杆身与拉绳121连接,所述连接杆143远离拉伸弹簧142的一端与所述锅筒焊接机器人的定位轴6连接。
33.由上述描述可知,由于拉伸弹簧142在受到径向力时会发生弯曲,从而连接杆143连接的定位轴6在伸入待焊接换热管内时,定位轴6通过拉伸弹簧142的弯曲,可自行的进行纠偏补偿,进而让定位轴6的轴线与待焊接的换热管的轴线重合。
34.进一步地,所述端盖141与限位套13相对滑动连接。
35.由上述描述可知,端盖141与限位套13相对滑动连接,能够便于送线组件12在收回拉绳121时,拉伸弹簧142能够顺利的进入到限位套13内。
36.进一步地,所述定位轴6远离柔性连接件14的一端设置有倒角。
37.由上述描述可知,在定位轴6上设置倒角能够便于定位轴6伸入待焊接换热管中进行定位。
38.本发明一种锅筒焊接机器人的补偿连接装置的应用场景:在需要将定位轴6准确的伸入待焊接换热管中时,将柔顺机构1与锅筒焊接机器人的定位轴6连接,在定位过程中,由气缸2驱动活动端动作使柔顺机构1和定位轴6靠近待焊接换热管,然后利用送线组件12放出拉绳121,使柔性连接件14和定位轴6在重力作用下继续朝向待焊接换热管移动,在柔性连接件14的活动端伸出限位套13后,定位轴6利用柔性连接件14的摆动,定位轴6能够进行纠偏补偿,进而让定位轴6的轴线与待焊接换热管的轴线重合,以保证锅筒焊接机器人对换热管的环缝焊接质量。
39.实施例一
40.一种锅筒焊接机器人的补偿连接装置,请参照图1和图2所示,包括柔顺机构1和气缸2;所述柔顺机构1包括安装板11、送线组件12、限位套13和柔性连接件14;所述安装板11沿厚度方向两侧分别设置有送线组件12和限位套13;所述送线组件12具有延伸至安装板11设置限位套13一侧的拉绳121;所述柔性连接件14的一端分别与拉绳121和所述锅筒焊接机器人的定位轴6连接,所述柔性连接件14的另一端为活动端,所述活动端可伸入限位套13内;当所述活动端伸入限位套13内时,所述柔性连接件14无法发生摆动;当所述活动端伸出限位套13时,所述柔性连接件14可发生摆动;所述气缸2的活动端与安装板11连接。所述送线组件12还包括电机122和卷线轴123;所述卷线轴123与电机122的输出端传动连接,所述拉绳121卷绕在卷线轴123上。
41.请参照图2所示,所述安装板11上设置有供拉绳121穿过的通孔111。所述安装板11设置送线组件12的一侧设置有牵引轮112,所述牵引轮112靠近通孔111,所述拉绳121与所述牵引轮112的轮面接触。
42.请参照图2所示,所述柔性连接件14包括端盖141、拉伸弹簧142和连接杆143;所述端盖141与拉伸弹簧142的一端连接,所述拉伸弹簧142的另一端与连接杆143连接,所述拉伸弹簧142可伸入限位套13内,所述连接杆143的杆身与拉绳121连接,所述连接杆143远离拉伸弹簧142的一端与所述锅筒焊接机器人的定位轴6连接。所述端盖141与限位套13相对滑动连接。
43.所述定位轴6远离柔性连接件14的一端设置有倒角。
44.工作原理:在需要将定位轴6伸入待焊接换热管过程中,利用气缸2驱动活动端动作使柔顺机构1和定位轴6靠近待焊接换热管,然后送线组件12的电机122驱动卷线轴123转动释放出拉绳121,使柔性连接件14和定位轴6在重力作用下继续朝向待焊接换热管移动,当拉伸弹簧142退出限位套13后,由于拉伸弹簧142在受到径向力时会发生弯曲,从而连接杆143连接的定位轴6在伸入待焊接换热管内时,定位轴6通过拉伸弹簧142的弯曲,可自行的进行纠偏补偿,进而让定位轴6的轴线与待焊接换热管的轴线重合。
45.在完成焊接后,电机122驱动卷线轴123反转,将拉绳121收回,从而让定位轴6退出换热管,并同时拉伸弹簧142在端盖141的引导下进入到限位套13内,使拉伸弹簧142无法弯曲,因此锅筒焊接机器人在摆动定位轴6一定角度后,使定位轴6朝向另一待焊接换热管的管口后,定位轴6不会受重力影响而发生活动。
46.实施例二
47.本实施例在实施例一的基础上进一步限定了送线组件12对柔性连接件14的连接机构:
48.请参照图2所示,所述连接杆143的杆身上沿周向均匀分布有四个穿线环3;所述电机122为双轴电机,所述双轴电机的两个输出轴上分别设置有第一斜齿轮4;所述卷线轴123数量为两个,所述卷线轴123的一端设置有与第一斜齿轮4相啮合的第二斜齿轮5;所述拉绳121的数量为两根,一根所述拉绳121穿过相邻两个穿线环3,另一个所述拉绳121穿过另外两个穿线环3,所述拉绳121的两端均卷绕在卷线轴123上。
49.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1