基于图像识别的水导激光自动对焦系统及其对焦方法
本发明涉及水导激光加工,特别是涉及基于图像识别的水导激光自动对焦系统及其对焦方法。
背景技术:
1、水导激光加工(water jet guided laser)是一种水射流与激光复合的特种加工技术。水导激光加工中,首先将激光束聚焦到微细水射流当中,由于激光在水中与空气中的折射率不同,在满足全反射的条件下激光将在水与空气的界面发生全反射,从而不断向前传输,水射流将激光引导到材料表面进行加工。水导激光加工方法结合了常规激光加工方法和水射流加工方法的特点,一方面继承了激光切割无机械压力、无刀具磨损、切口宽度窄等优点,另一方面又利用了微细水射流良好的散热和冲刷作用,有效减少切割区域附近的热效应,及时带走熔渣避免污染和重熔,大大提高切割质量,有效解决了传统机械加工与常规激光加工的弊端。然而由于激光在水射流中通过全反射传播,因此在加工工件之前,必须将激光束与水射流进行耦合,这就要求将激光光斑移动至喷嘴口的位置上。
2、现有技术存在以下弊端:
3、由使用者通过设备(如摄像机)观察,通过使用者的视觉识别出喷嘴位置,随后将激光束向孔移动,通过聚焦实现耦合。该过程耗时较长,且由于目视始终存在一定误差,导致耦合效果不理想。通过光学检测来自喷嘴的激光束反射,控制激光束进行扫描,以实现自动对准。仍然不能完全排除手动操作;且进行扫描可能会对喷嘴造成不利影响。通过检测设备放在工作平台上,通过检测水射流传递到工作平台上的功率确定耦合是否成功。操作复杂;受外界环境影响,测量易产生误差。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明提出一种基于图像识别的水导激光自动对焦系统,基于图像处理的水导激光耦合过程,该过程基于光学地感测喷嘴与激光光斑的实际位置,通过图像处理取得二者相对位置,并通过计算以实现激光与喷嘴的耦合。
3、本发明的另一个目的在于提出一种基于图像识别的水导激光自动对焦方法。
4、为达上述目的,本发明一方面提出一种基于图像识别的水导激光自动对焦系统,包括:
5、激光单元,用于提供激光;
6、光学单元,用于将激光从所述激光单元转移至所述喷嘴单元;
7、喷嘴单元,用于产生水射流;
8、观测单元,用于识别水射流传导激光产生的喷嘴表面图像,以根据图像识别结果得到喷嘴圆心与激光光斑圆心的相对位置。
9、另外,根据本发明上述实施例的基于图像识别的水导激光自动对焦系统还可以具有以下附加的技术特征:
10、进一步地,在本发明的一个实施例中,所述系统,还包括:
11、控制单元,所述控制单元用于控制所述喷嘴单元移动,使得喷嘴圆心移动至激光光斑圆心的位置以完成位置信息耦合。
12、进一步地,在本发明的一个实施例中,所述控制单元,还用于:
13、控制所述光学单元中镜片位置以调整激光光斑圆心位置,以将激光光斑圆心移动至喷嘴圆心的位置。
14、进一步地,在本发明的一个实施例中,所述系统,还包括:
15、照明单元,所述照明单元用于为所述光学单元产生的激光提供光照。
16、为达上述目的,本发明另一方面提出一种基于图像识别的水导激光自动对焦方法,包括:
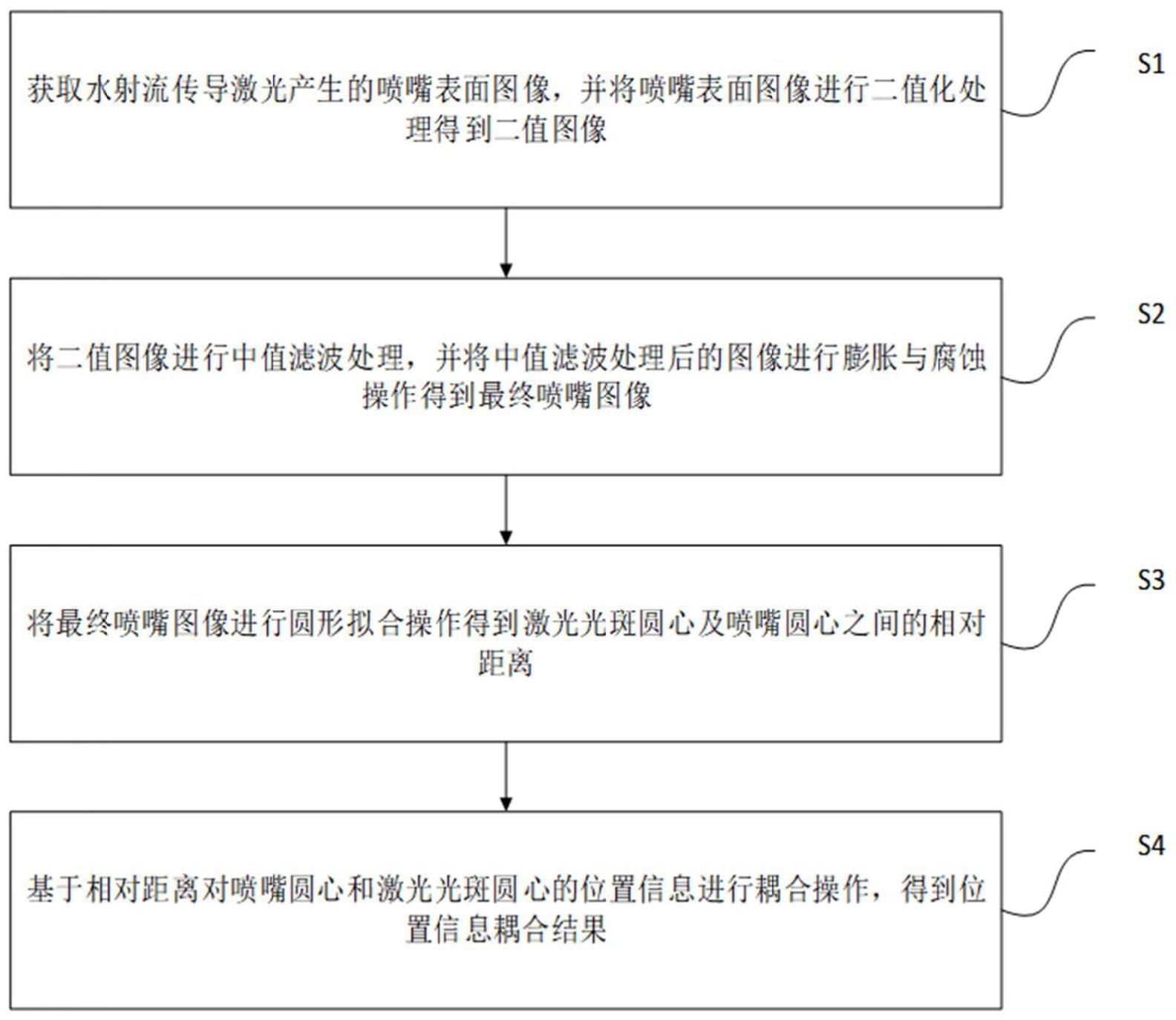
17、获取激光照射水射流产生的喷嘴表面图像,并将所述喷嘴表面图像进行二值化处理得到二值图像;
18、将所述二值图像进行中值滤波处理,并将中值滤波处理后的图像进行膨胀与腐蚀操作得到最终喷嘴图像;
19、将所述最终喷嘴图像进行圆形拟合操作得到激光光斑圆心及喷嘴圆心之间的相对距离;
20、基于所述相对距离对喷嘴圆心和激光光斑圆心的位置信息进行耦合操作,得到位置信息耦合结果。
21、本发明实施例的基于图像识别的水导激光自动对焦系统及其对焦方法,能够提高水导激光的耦合精度,降低耦合时间,减少人工参与。
22、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于图像识别的水导激光自动对焦系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,所述系统,还包括:
3.根据权利要求1所述的系统,其特征在于,所述控制单元,还用于:
4.根据权利要求1所述的系统,其特征在于,所述系统,还包括:
5.一种应用于如权利要求1-4中任一一项所述基于图像识别的水导激光自动对焦系统的对焦方法,其特征在于,包括:
6.根据权利要求5所述的方法,其特征在于,所述将所述喷嘴表面图像进行二值化处理得到二值图像,包括:
7.根据权利要求5所述的方法,其特征在于,所述将所述二值图像进行中值滤波处理,包括将所述二值图像或序列中心点位置的值使用域的中值替代。
8.根据权利要求5所述的方法,其特征在于,所述将中值滤波处理后的图像进行膨胀与腐蚀操作得到最终喷嘴图像,包括:
9.根据权利要求5所述的方法,其特征在于,所述方法,还包括:
技术总结
本发明公开了基于图像识别的水导激光自动对焦系统及其对焦方法,该方法包括:获取水射流传导激光产生的喷嘴表面图像,并将喷嘴表面图像进行二值化处理得到二值图像;将二值图像进行中值滤波处理,并将中值滤波处理后的图像进行膨胀与腐蚀操作得到最终喷嘴图像;将最终喷嘴图像进行圆形拟合操作得到激光光斑圆心及喷嘴圆心之间的相对距离;基于相对距离对喷嘴圆心和激光光斑圆心的位置信息进行耦合操作,得到位置信息耦合结果。本发明可以提高水导激光的耦合精度,降低耦合时间,减少人工参与。
技术研发人员:韩福柱,唐文翰,潘遇安,徐星汉
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!