一种可自调位姿的磁吸钻机
本发明属于钻削设备,具体涉及一种可自调位姿的磁吸钻机。
背景技术:
1、钻床是指用钻头在工件上加工孔的机床,在金属加工有着广泛应用。通常,在加工工件时,除了需要保证孔的位置精度,还需要保证加工面与钻头的角度(一般为垂直角度)。对于只有一个加工面的简单工件,只需要装夹一次便可以加工完毕;但是对于复杂的工件,可能需要在很多不平行的面上钻孔,也有可能在曲面上钻孔,此时需要多次装夹才能保证每次钻孔时钻头垂直于被加工面,这种情况下,不仅装夹工序繁多,效率低下,而且由于夹具本身精度不高,钻头和被加工表面也很难保证垂直,装夹质量的好坏往往取决于操作人员的技能和经验,随机性大,工作效率低。此外,夹具设计制造也带来的大量工作和成本。因此,开发一种能实现多种平面或曲面上的打孔作业,降低钻削作业中工件的移动和装夹频率,并能够自动调节、固定钻头位置和位姿,保证打孔位置精度和打孔方向的自动化钻机,对于提高钻孔精度、提高加工效率以及减少人力资源成本都有着非常积极的现实意义。
2、现有技术中也有一些解决上述问题的方案:专利cn108098784a公开了一种飞机机翼钻铣加工机器人,用于飞机机翼表面加工,能够在曲面上实现主轴自动对中、自动法向找正,提高所钻孔的精度,降低加工成本。该发明通过xy位移平台和3轴并联机构实现了精确定位的功能,但是其不足也较为明显:3轴并联机构的工作空间较小,只能在小范围内调节位姿,吸附固定精度误差大;使用激光跟踪仪来调整位姿需要一个复杂的算法求解,而且每一次钻削都需要单独计算求解,提高了成本。专利cn104308839a公开了一种结构解耦的六足钻、铣削加工机器人,包括:装有钻、铣削电主轴的机器人躯干、六条机械腿、六个装有吸附装置的足;通过六条机械腿在被加工对象表面行走、定位,实现钻、铣削加工。该方案每条机械腿是一种支链含闭环的三自由度解耦机构,因此控制钻头定位时,解耦算法复杂且计算精度难以保证,因此导致控制效率低,定位精度低。
3、综上所述,现有技术中的方案或应用受限、定位效果差,或结构复杂、控制效率低、控制精度差,用于复杂表面上钻削作业且具有自定位功能的钻削设备的研究依然意义重大。
技术实现思路
1、针对现有技术的不足,本发明提供一种可自调位姿的磁吸钻机,该钻机不但能在复杂表面上吸附固定、实施钻削作业,还能自动调节钻机主轴位姿以定位钻孔位置和钻孔方向,不但节省了夹具制造和装夹调试所需的时间和人工成本,而且结构紧凑,控制简单,钻削精度高。
2、为实现上述目的,本发明提供了如下技术方案:
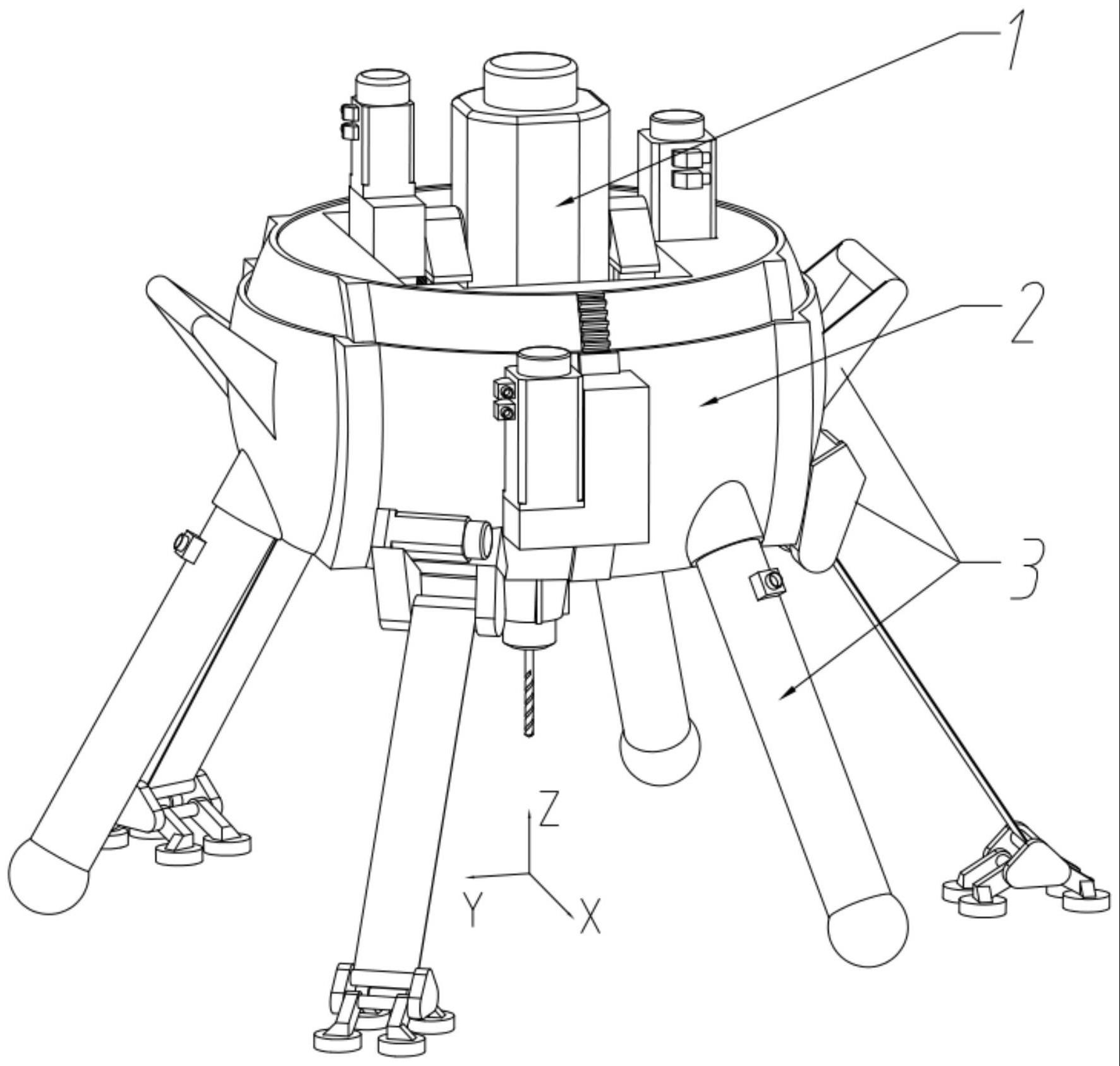
3、一种可自调位姿的磁吸钻机,其特征在于,包括钻削组件、位姿调节组件、钻机固定组件;其中,钻削组件包括钻削机构和钻削进给机构,布置于位姿调节组件中心,并与位姿调节组件通过传动机构连接;位姿调节组件包括3r1p四轴串联机构,用于自动调节钻削组件位姿以定位钻孔位置和钻孔方向;钻机固定组件固定在位姿调节组件外侧,用于钻机的固定;钻机固定组件包括三个支撑杆和三组带牵拉磁吸足,三个支撑杆和三组带牵拉磁吸足均关于钻机中心轴中心对称安装,且交替均匀布置;所述带牵拉磁吸足包括缠绕机构、缠绕伺服电机、拉带和磁性足,缠绕伺服电机连接并驱动缠绕机构,拉带上端固定在缠绕机构上,下端连接磁性足;磁性足包括三杆连接件,三杆连接件中的上部杆固定连接拉带下端,两根下部杆分别通过连接件可转动地连接有两个磁铁;支撑杆上安装有压力传感器,且其末端安装有橡胶球形垫。
4、优选地,所述钻削组件由棱柱筒形外壳支承;所述钻削机构包括依次固定连接的钻削主轴、钻头夹具、钻头,钻削主轴外表面固定有沿其中心轴方向布置的燕尾块,燕尾块与开设在外壳内侧的燕尾槽嵌套,使钻削主轴与外壳轴向滑动连接;所述钻削进给机构包括进给电机、齿轮、齿条,进给电机通过连接件固定在外壳外表面,齿轮固定在进给电机的输出轴上,齿条竖直固定在钻削主轴上,齿轮与齿条啮合。
5、优选地,所述钻削组件下端关于钻削主轴中心对称布置固定有四个激光投线仪和六个红外测距传感器。
6、进一步优选地,所述钻削组件顶部还安装有陀螺仪传感器。
7、优选地,所述3r1p四轴串联机构包括四个串联的传动机构,其中,第一至第四传动机构分别实现钻削组件竖直面内旋转、水平面内移动、水平面内转动、竖直面内旋转;第一传动机构与钻削组件连接,第四传动机构与钻机固定组件连接。
8、进一步优选地,所述第一传动机构包括第一电机、传动箱、涡轮、第一蜗杆;传动箱一端与钻削组件上的第一横销销连接,对应的另一端固定在第一电机外壳上,涡轮、第一蜗杆安装在传动箱内,涡轮固定在横销上,第一蜗杆固定在第一电机输出轴上,涡轮、第一蜗杆啮合;第一电机与第二传动机构连接。
9、进一步优选地,所述第二传动机构包括第二电机、第一齿轮箱、丝杠滑轨架,丝杠滑轨架包括平行安装的丝杠和滑轨,第二电机通过第一齿轮箱与丝杠固定,丝杠与第一传动机构上的螺母滑环旋合;丝杠滑轨架、第二电机均与第三传动机构固定。
10、进一步优选地,所述第三传动机构包括依次固定连接的第三电机、第二齿轮箱、第一锥齿轮以及锥齿圈,第三电机、第二齿轮箱通过圆台与第二传动机构固定,第一锥齿轮与锥齿圈啮合;锥齿圈与第四传动机构固定。
11、进一步优选地,第四传动机构包括第四电机、第三齿轮箱、第二蜗杆、弧形齿条、内球壳;第四电机、第三齿轮箱、第二蜗杆依次固定连接,并固定在外球壳上;弧形齿条固定在内球壳外侧,内球壳与第三传动机构固定;第二蜗杆、弧形齿条啮合。
12、再进一步优选地,所述外球壳上至少布置有一组楔形滑槽,所述楔形滑槽与所述内球壳上对应布置的楔形滑块相互嵌套滑动。
13、与现有技术相比,本发明的有益效果是:
14、1.因为本发明采用均匀分布在球壳上的三个刚性支撑足(支撑杆)和三个磁吸式自适应支撑足(带牵拉磁吸足)装夹固定钻机,而且三个刚性支撑足上设置压力传感器,用于精确控制三个方向上的装夹力,不但使得钻机固定更加可靠、稳定,还能在钻削过程中自动调节钻削力,有利于提高钻削精度。
15、2.因为本发明采用3r1p四轴串联机构调节钻机主轴位姿,位姿调节算法简单、可靠;而且为固定钻削主轴的圆台上设置两转一移三个自由度,在圆台与钻机固定组件之间设置球壳,球壳上设置控制圆台相对球壳转动的机构,不但补偿了圆台上三个电机控制钻机主轴位姿的奇异点,还使得电机位姿调控和钻机固定调控相互独立,位姿调控也更加灵活、可靠。
技术特征:
1.一种可自调位姿的磁吸钻机,其特征在于,包括钻削组件(1)、位姿调节组件(2)、钻机固定组件(3);
2.根据权利要求1所述的一种可自调位姿的磁吸钻机,其特征在于,所述钻削组件(1)由棱柱筒形外壳(102)支承;
3.根据权利要求1所述的一种可自调位姿的磁吸钻机,其特征在于,
4.根据权利要求3所述的一种可自调位姿的磁吸钻机,其特征在于,所述钻削组件(1)顶部还安装有陀螺仪传感器(101)。
5.根据权利要求1所述的一种可自调位姿的磁吸钻机,其特征在于,所述3r1p四轴串联机构包括四个串联的传动机构,其中,第一至第四传动机构分别实现钻削组件(1)竖直面内旋转、水平面内移动、水平面内转动、竖直面内旋转;第一传动机构与钻削组件(1)连接,第四传动机构与钻机固定组件(3)连接。
6.根据权利要求5所述的一种可自调位姿的磁吸钻机,其特征在于,所述第一传动机构包括第一电机(201)、传动箱(204)、涡轮(203)、第一蜗杆(202);传动箱(204)一端与钻削组件(1)上的第一横销(111)销连接,对应的另一端固定在第一电机(201)外壳上,涡轮(203)、第一蜗杆(202)安装在传动箱(204)内,涡轮(203)固定在横销(111)上,第一蜗杆(202)固定在第一电机(201)输出轴上,涡轮(203)、第一蜗杆(202)啮合;第一电机(201)与第二传动机构连接。
7.根据权利要求5所述的一种可自调位姿的磁吸钻机,其特征在于,所述第二传动机构包括第二电机(211)、第一齿轮箱(210)、丝杠滑轨架,丝杠滑轨架包括平行安装的丝杠(205)和滑轨(206),第二电机(211)通过第一齿轮箱(210)与丝杠(205)固定,丝杠(205)与第一传动机构上的螺母滑环(2041)旋合;丝杠滑轨架、第二电机(211)均与第三传动机构固定。
8.根据权利要求5所述的一种可自调位姿的磁吸钻机,其特征在于,所述第三传动机构包括依次固定连接的第三电机(212)、第二齿轮箱(214)、第一锥齿轮(213)以及锥齿圈(215),第三电机(212)、第二齿轮箱(214)通过圆台与第二传动机构固定,第一锥齿轮(213)与锥齿圈(215)啮合;锥齿圈(215)与第四传动机构固定。
9.根据权利要求5所述的一种可自调位姿的磁吸钻机,其特征在于,所述第四传动机构包括第四电机(219)、第三齿轮箱(220)、第二蜗杆(221)、弧形齿条(218)、内球壳(217);第四电机(219)、第三齿轮箱(220)、第二蜗杆(221)依次固定连接,并固定在外球壳(222)上;弧形齿条(218)固定在内球壳(217)外侧,内球壳(217)与第三传动机构固定;第二蜗杆(221)、弧形齿条(218)啮合。
10.根据权利要求9所述的一种可自调位姿的磁吸钻机,其特征在于,所述外球壳(222)上至少布置有一组楔形滑槽(2221),所述楔形滑槽(2221)与所述内球壳(217)上对应布置的楔形滑块(2171)相互嵌套滑动。
技术总结
本发明属于钻削设备技术领域,公开了一种可自调位姿的磁吸钻机,包括依次连接的钻削组件、位姿调节组件、钻机固定组件;其中,钻削组件包括钻削机构和钻削进给机构,位姿调节组件包括3R1P四轴串联机构,钻机固定组件包括三个支撑杆和三组带牵拉磁吸足,三个支撑杆和三组带牵拉磁吸足均关于钻机中心轴中心对称安装,且交替均匀布置。该钻机不但能在复杂表面上吸附固定、实施钻削作业,还能自动调节钻机主轴位姿以定位钻孔位置和钻孔方向,不但节省了夹具制造、装夹、调试所需的时间和人工成本,而且结构紧凑,控制简单,钻削精度高。
技术研发人员:潘自立,王大中,刘胜,黄帅,凌志文,卢浩翔,恽熠鑫,罗向城,吴淑晶,刘书华
受保护的技术使用者:上海工程技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!