一种图像采集装置的制作方法
本发明涉及一种图像采集装置,更具体地说,它涉及一种用于机床刀具检测用的图像采集装置。
背景技术:
1、在传统的数控加工中,依赖于人工对刀具的情况进行检查,在每个切割任务前,都需要有经验的工人对刀具进行观察,评估其是否满足加工的任务要求。这些检查主要依赖于人工进行,大部分时候也需要到机床现场进行评估。人工检验既存在效率低下,又存在人为误差的缺点。随着智能制造的提倡和推广,智能加工逐渐开始趋向于自动化检验,而且由于计算机科学、人工智能等领域高速发展,机器视觉技术将相机,图像采集,图像处理等模块整合到零件的质量自动化检验中。例如cn202010061083.0公开了一种基于视觉特征提取的刀具损伤检测方法,可以判断刀具是否具有损伤是否具备继续使用的条件。现有技术对检测用的图像进行采样时,一般通过在刀库内设置摄像头,来实现对刀具的采样。例如,cn202111113329.5公开了一种基于机器视觉的刀库集成式刀具损伤检测系统及方法,其采样系统集成于刀库内,该采样装置的通用性较差,不能实现老旧设备的升级。因此,需要提供一种制备简单、成本合理的图像采集装置。
技术实现思路
1、本发明的目的是提供一种图像采集装置,达到了移动方便效果,使其可以方便地在不同机床设备之间轮换使用。
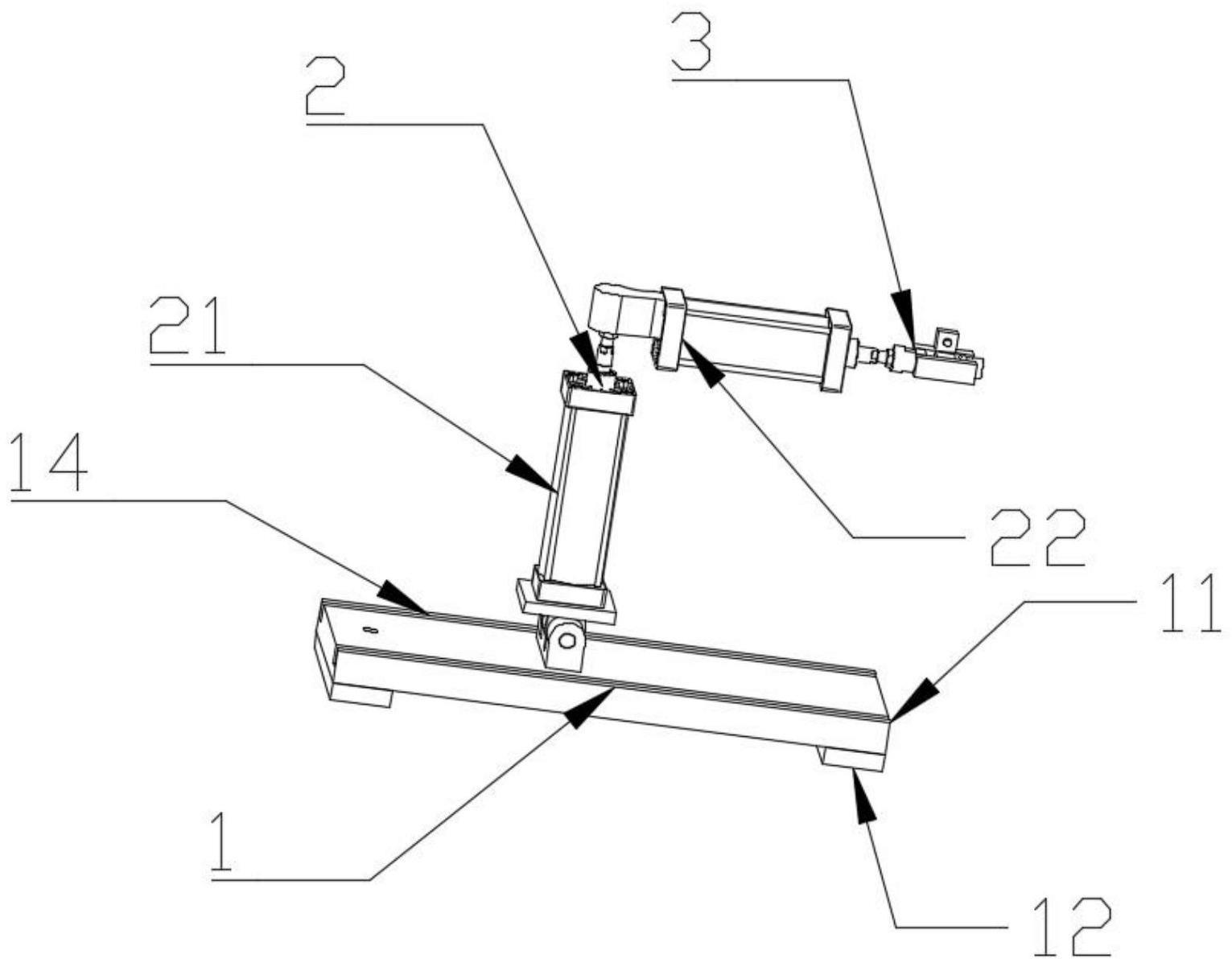
2、本发明的上述技术目的是通过以下技术方案得以实现的:一种图像采集装置,所述图像采集装置包括摄像头和固定装置;固定装置包括固定座、机械臂和安装架;机械臂设置于固定座上;安装架设置于机械臂的末端;安装架上设置有步进电机;步进电机与摄像头连接;步进电机可以带动摄像头转动,使摄像头朝向在水平和竖直方向上切换;机械臂可以带动安装架在竖直和水平方向移动;固定座包括底座和磁吸块;磁吸块设置于底座下方;机械臂设置于底座上。
3、进一步的,机械臂包括伸缩臂;伸缩臂包括第一伸缩臂和第二伸缩臂;第一伸缩臂包括第一固定部和第一伸缩部;第一固定部与固定座连接;第二伸缩臂包括第二固定部和第二伸缩部;第一伸缩部与第二固定部连接;安装架设置于第二伸缩部上;第一伸缩臂和第二伸缩臂的伸缩方向相互垂直。
4、进一步的,伸缩臂包括缸筒、活塞和复位簧;缸筒的尾端封闭,缸筒尾部设置有进气口;活塞设置于缸筒内;活塞上设置有伸缩部;复位簧设置于缸筒的内部;复位簧一端与缸筒的底部连接,另一端与活塞连接。
5、进一步的,机械臂与固定座相铰接。
6、进一步的,底座上设置有导轨;还包括折叠防尘罩,折叠防尘罩与导轨连接;折叠防尘罩可以在直线导轨上运动,用于遮蔽机械臂和摄像机。
7、综上所述,本发明具有以下有益效果:
8、1、采用磁吸式底座可以使装置更加方便移动。机床内部金属结构较多,通过磁吸式的底座可以使装置固定在任何设备内或者设备外,方便对于无视觉设备的机床进行检测,有利于实现自动化或远程化刀具诊断,提高了刀具检测的效率。
9、2、机械臂和步进电机可以带动摄像头实现刀头端部和杆部的全身视觉检测,提高了检测的准确性。
技术特征:
1.一种图像采集装置,其特征是:所述图像采集装置包括摄像头和固定装置;固定装置包括固定座、机械臂和安装架;机械臂设置于固定座上;安装架设置于机械臂的末端;安装架上设置有步进电机;步进电机与摄像头连接;步进电机可以带动摄像头转动,使摄像头朝向在水平和竖直方向上切换;机械臂可以带动安装架在竖直和水平方向移动;固定座包括底座和磁吸块;磁吸块设置于底座下方;机械臂设置于底座上。
2.根据权利要求1所述的一种图像采集装置,其特征是:机械臂包括伸缩臂;伸缩臂包括第一伸缩臂和第二伸缩臂;第一伸缩臂包括第一固定部和第一伸缩部;第一固定部与固定座连接;第二伸缩臂包括第二固定部和第二伸缩部;第一伸缩部与第二固定部连接;安装架设置于第二伸缩部上;第一伸缩臂和第二伸缩臂的伸缩方向相互垂直。
3.根据权利要求2所述的一种图像采集装置,其特征是:伸缩臂包括缸筒、活塞和复位簧;缸筒的尾端封闭,缸筒尾部设置有进气口;活塞设置于缸筒内;活塞上设置有伸缩部;复位簧设置于缸筒的内部;复位簧一端与缸筒的底部连接,另一端与活塞连接。
4.根据权利要求1所述的一种图像采集装置,其特征是:机械臂与固定座相铰接。
5.根据权利要求1所述的一种图像采集装置,其特征是:底座上设置有导轨;还包括折叠防尘罩,折叠防尘罩与导轨连接;折叠防尘罩可以在直线导轨上运动,用于遮蔽机械臂和摄像机。
技术总结
本发明公开了一种图像采集装置,确切的说它涉及一种用于机床刀具检测用的图像采集装置,解决了现有采集装置移动不便,通用性差的问题,其技术方案要点是:一种图像采集装置,所述图像采集装置包括摄像头和固定装置;固定装置包括固定座、机械臂和安装架;机械臂设置于固定座上;安装架设置于机械臂的末端;安装架上设置有步进电机;步进电机与摄像头连接;步进电机可以带动摄像头转动,使摄像头朝向在水平和竖直方向上切换;机械臂可以带动安装架在竖直和水平方向移动;固定座包括底座和磁吸块;磁吸块设置于底座下方;机械臂设置于底座上。达到方便移动,通用性强的目的。
技术研发人员:刘钢,刘方吉,茅健,杨青平,戴时飞
受保护的技术使用者:成都永峰科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!