一种点焊机器人焊接方法与流程
本发明主要涉及工业机器人的,具体涉及一种点焊机器人焊接方法。
背景技术:
1、电阻点焊是电阻焊的一种,是通过点焊电极对工件施加电极压力并通电,利用电阻热进行焊接的方法。
2、根据申请号为cn202021745219.1的专利文献所提供的关节式焊接机器人可知,该焊接机器人包括底座、焊枪,底座上设有焊丝箱,焊丝箱内固定有固定杆,固定杆外套设有焊丝盘,焊丝盘包括缠绕部和两个挡沿,挡沿上设有连接杆,连接杆上转动连接有锁定棘爪,连接杆外套设有锁定扭簧,挡沿的外侧套设有锁定环,锁定环固定于焊丝箱内,锁定环的上表面上设有环形的齿槽,锁定棘爪远离连接杆的端部与其中一个齿槽卡接;驱动臂上设有送丝箱,送丝箱内设有张紧机构、送丝机构。该实用新型能对焊丝进行整形,实现焊接机器人的平稳均匀送丝,能自动调节焊丝伸出焊枪的长度,避免发生堵丝或者断丝现象,保证稳定的焊接电流,形成均匀的焊缝,从而保证焊接效果。
3、上述焊接机器人能对焊丝进行整形,实现焊接机器人的平稳均匀送丝,但传统的焊接机器人往往通过焊丝管维持焊丝的状态,缺少张紧的焊丝容易无法稳定地进入到焊接头内,供焊接头使用,从而影响机器人的点焊加工。
技术实现思路
1、本发明主要提供了一种点焊机器人焊接方法用以解决上述背景技术中提出的技术问题。
2、本发明解决上述技术问题采用的技术方案为:
3、一种点焊机器人焊接方法,包括以下步骤:
4、步骤一,通过摆动臂和驱动臂调整焊接头至距离焊接点较近的位置;
5、步骤二,焊丝经过焊丝张紧机构,从而为焊接头供丝;
6、步骤三,到达焊接位置的焊接头对工件进行点焊加工;
7、焊丝经过焊丝张紧机构的过程中,第一电磁铁推动第一轮体,通过第一轮体抵住焊丝,增大通过第一电磁铁的电流,以增强第一电磁铁的磁斥能力,保持对焊丝的张紧力。
8、进一步的,通过第一轮体抵住焊丝的过程中,第二轮体进行上下移动;
9、当第二轮体上移时,通过第二轮体上设置的排气孔所喷出的保护气体,以对焊丝进行保护;
10、当第二轮体下移时,通过第二轮体与第一轮体分别列于焊丝的两侧,以对焊丝进行夹持,减少焊丝的移动,提高对焊丝张紧时的效果。
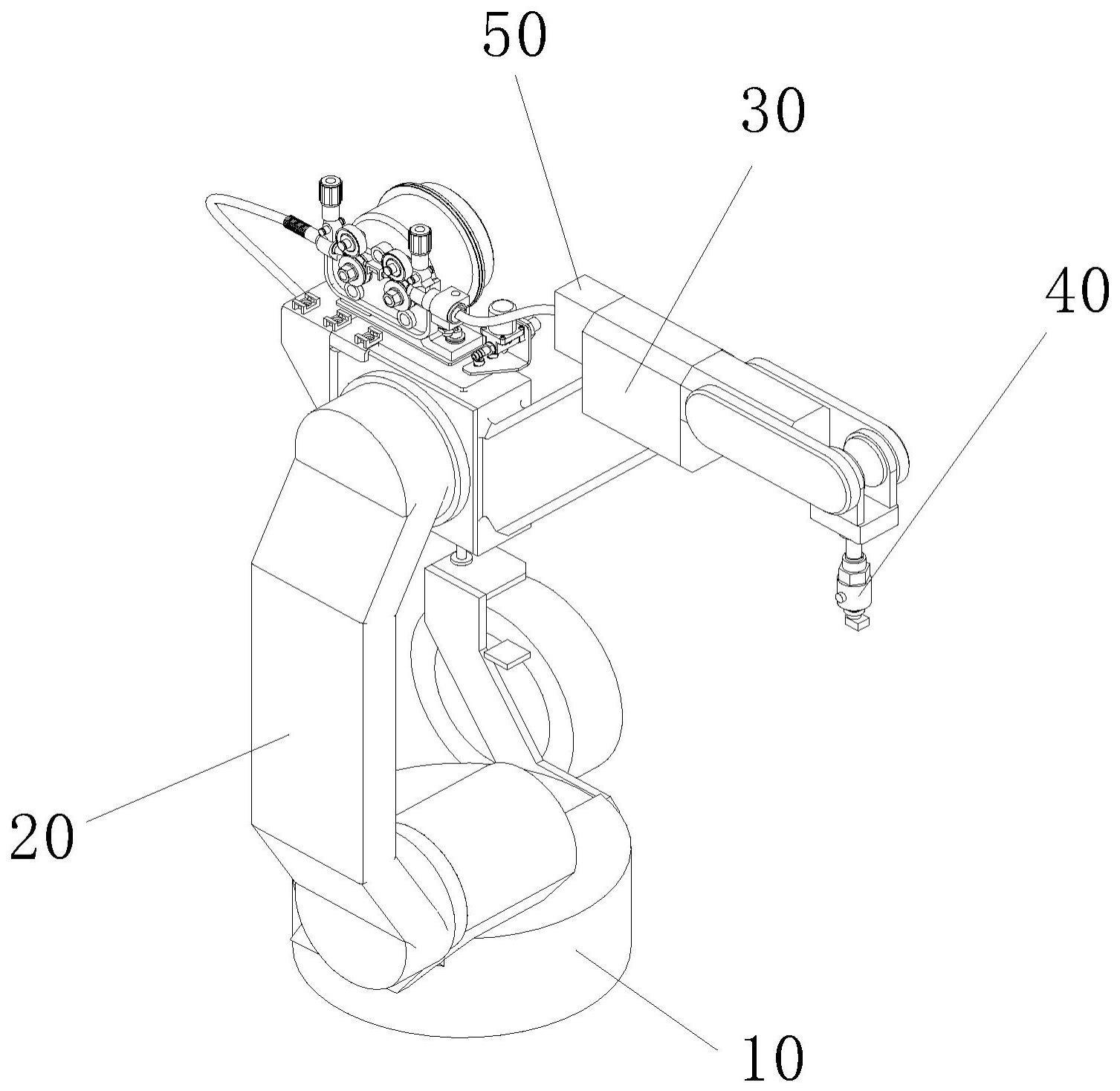
11、进一步的,一种点焊机器人,用于实施所述的一种点焊机器人焊接方法,包括底座,所述底座的顶端转动连接有摆动臂,所述摆动臂远离所述底座的一端转动连接有驱动臂,所述驱动臂远离所述摆动臂的一端连接有焊接头,所述驱动臂的上表面连接有焊丝张紧机构;
12、所述焊丝张紧机构包括安装于所述驱动臂上表面的张紧盒,安装于所述张紧盒内部的磁斥伸缩组件,与所述磁斥伸缩组件的执行端相连接的张紧轮;
13、所述磁斥伸缩组件包括安装于所述张紧盒内部底端的两个电流限制器,以及设于两个所述电流限制器之间、且与所述电流限制器滑动连接的滑动杆,所述滑动杆的一端与所述张紧轮相连接。
14、进一步的,所述电流限制器包括安装于所述张紧盒内部底端的电阻板,以及与所述电阻板滑动连接的导电滑片,所述导电滑片安装于所述滑动杆两侧,在本发明中,通过导电滑片在电阻板上的滑动,以改变与导电滑片、电阻板形成电路的第一电磁铁的电流大小。
15、进一步的,所述滑动杆包括安装于所述张紧轮底端的杆体,以及套设于所述杆体的外部、且由上至下依次设置的第一永磁铁以及第一电磁铁,所述杆体的一端与所述导电滑片相连接,所述第一电磁铁安装于两个所述电阻板之间,在本发明中,杆体以及其上张紧轮所受到的推力相同,以保持对焊丝的张紧力,防止随焊丝上升过程中的,因对杆体的推力不足,而影响对焊丝的张紧效果。
16、进一步的,所述张紧轮包括安装于所述杆体远离所述第一永磁铁一端的转轮架,以及通过转轴连接于所述转轮架内部的第一轮体,在本发明中,通过转轮架为第一轮体提供支撑,通过第一轮体抵住焊丝,并通过第一轮体跟随焊丝的转动而转动,以为焊丝提供支撑。
17、进一步的,所述转轮架的一端滑动连接有第二轮体,所述第二轮体与所述转轮架之间通过磁推部件相连接,在本发明中,当第二轮体上移时,通过第二轮体上设置的排气孔所喷出的保护气体,以对焊丝进行保护。
18、进一步的,所述磁推部件包括设于所述转轮架两侧的滑板,与所述滑板滑动连接的滑块,以及安装于所述滑块下表面的第二永磁铁,所述第二永磁铁的底端设有连接于所述滑板内部的第二电磁铁,所述滑块通过转轴与所述第二轮体相连接,在本发明中,由于第二电磁铁与的导电滑片、电阻板形成电路,以在第一轮体上移时,第二电磁铁磁斥力减弱,第二轮体下移,以通过第二轮体配合第一轮体进行张紧。
19、进一步的,所述张紧盒内部内部安装有气泵,所述气泵的输入端通过软管与所述第二轮体相连接,在本发明中,通过气泵引导保护气体经过软管,经过软管的保护气体进入到第二轮体的内部。
20、进一步的,所述滑板的壳体上设有t形槽,所述t形槽的槽体底端设有堵块,在本发明中,通过堵块封堵第二轮体开口,防止保护气体进入到第二轮体中,使得第二轮体排出的气体影响焊丝的张紧。
21、与现有技术相比,本发明的有益效果为:
22、其一,本发明能够对焊丝进行有效张紧,以使焊丝稳定进入到焊接头内,增加点焊的稳定性,具体为:焊丝经过焊丝张紧机构的过程中,第一电磁铁推动第一轮体,通过第一轮体抵住焊丝,增大通过第一电磁铁的电流,以增强第一电磁铁的磁斥能力,保持对焊丝的张紧力。
23、其二,本发明在第二轮体上移时,通过第二轮体上设置的排气孔所喷出的保护气体,以对焊丝进行保护;在第二轮体下移时,通过第二轮体与第一轮体分别列于焊丝的两侧,以对焊丝进行夹持,减少焊丝的移动,提高对焊丝张紧时的效果。
24、以下将结合附图与具体的实施例对本发明进行详细的解释说明。
技术特征:
1.一种点焊机器人焊接方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种点焊机器人焊接方法,其特征在于,通过第一轮体(532)抵住焊丝的过程中,第二轮体(533)进行上下移动;
3.一种点焊机器人,用于实施权利要求1-2任一项所述的一种点焊机器人焊接方法,包括底座(10),其特征在于,所述底座(10)的顶端转动连接有摆动臂(20),所述摆动臂(20)远离所述底座(10)的一端转动连接有驱动臂(30),所述驱动臂(30)远离所述摆动臂(20)的一端连接有焊接头(40),所述驱动臂(30)的上表面连接有焊丝张紧机构(50);
4.根据权利要求3所述的一种点焊机器人,其特征在于,所述电流限制器(521)包括安装于所述张紧盒(51)内部底端的电阻板(5211),以及与所述电阻板(5211)滑动连接的导电滑片(5212),所述导电滑片(5212)安装于所述滑动杆(522)两侧。
5.根据权利要求4所述的一种点焊机器人,其特征在于,所述滑动杆(522)包括安装于所述张紧轮(53)底端的杆体(5221),以及套设于所述杆体(5221)的外部、且由上至下依次设置的第一永磁铁(5222)以及第一电磁铁(5223),所述杆体(5221)的一端与所述导电滑片(5212)相连接,所述第一电磁铁(5223)安装于两个所述电阻板(5211)之间。
6.根据权利要求5所述的一种点焊机器人,其特征在于,所述张紧轮(53)包括安装于所述杆体(5222)远离所述第一永磁铁(5221)一端的转轮架(531),以及通过转轴连接于所述转轮架(531)内部的第一轮体(532)。
7.根据权利要求6所述的一种点焊机器人,其特征在于,所述转轮架(531)的一端滑动连接有第二轮体(533),所述第二轮体(533)与所述转轮架(531)之间通过磁推部件(534)相连接。
8.根据权利要求7所述的一种点焊机器人,其特征在于,所述磁推部件(534)包括设于所述转轮架(531)两侧的滑板(5341),与所述滑板(5341)滑动连接的滑块(5342),以及安装于所述滑块(5342)下表面的第二永磁铁(5343),所述第二永磁铁(5343)的底端设有连接于所述滑板(5341)内部的第二电磁铁(5344),所述滑块(5342)通过转轴与所述第二轮体(533)相连接。
9.根据权利要求8所述的一种点焊机器人,其特征在于,所述张紧盒(51)内部内部安装有气泵(511),所述气泵(511)的输入端通过软管与所述第二轮体(533)相连接。
10.根据权利要求8所述的一种点焊机器人,其特征在于,所述滑板(5341)的壳体上设有t形槽(5345),所述t形槽(5345)的槽体底端设有堵块(5346)。
技术总结
本发明提供了一种点焊机器人焊接方法,包括以下步骤:步骤一,通过摆动臂和驱动臂调整焊接头至距离焊接点较近的位置;步骤二,焊丝经过焊丝张紧机构,从而为焊接头供丝;步骤三,到达焊接位置的焊接头对工件进行点焊加工;焊丝经过焊丝张紧机构的过程中,第一电磁铁推动第一轮体,通过第一轮体抵住焊丝,增大通过第一电磁铁的电流,以增强第一电磁铁的磁斥能力,保持对焊丝的张紧力。本发明能够对焊丝进行有效张紧,以使焊丝稳定进入到焊接头内,增加点焊的稳定性。
技术研发人员:吴应举
受保护的技术使用者:芜湖常瑞汽车部件有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!