C形刀架、具有C形刀架的设置装置和设置C形刀架偏移差的方法与流程
本发明涉及一种c形刀架、具有该c形刀架的设置装置以及用于设置c形刀架偏移差的方法。
背景技术:
1、c形刀架的使用在现有技术中通常是已知的,例如通过设置装置。通常,对应的c形刀架包括限定框架平面的框架结构,并且包括通过连接件彼此连接的两个支腿。在设置装置的情况下,具有驱动单元和冲模圆顶的冲头设置在支腿的自由端。
2、在要建立的连接的精确性和中心性或同心度方面,对这种c形刀架的不断增加的要求限定了在过程引起的变形的情况下的公差。这种过程引起的变形例如是在设置过程中弯曲打开c形刀架。
3、对于中心性而言,与此相关的不是c形刀架的绝对变形,而是c形刀架变形使得冲头和冲模在操作点或以中心或同心方式接合时相遇。换句话说,c形刀架的两个支腿必须变形相等。在这种情况下,操作点或接合点是冲头和冲模的接触点,其中部件位于两者之间,其中部件厚度与设置装置的总行程相比可忽略不计。
4、在de 10 2007 020 166 a1中可以找到用于减少这种过程引起的变形的示例。在此,描述了一种具有机械活性元件的刀架,该刀架例如与机械设备一起用于通过技术成形的工艺,特别是铆接和冲压铆接,以及热连接工艺,例如电阻点焊、处理工艺、压花工艺、旋拧和压配合工艺。该刀架具有保持工具的工具保持部分,在操作时必须在使刀架的框架结构弹性变形的同时用操作力迫使工具抵靠工件等。在使用中增加的灵活性是通过以下事实提供的,在刀架处,特别是提供了在变形区域中活动或作用于变形区域的可拆卸的、机械活动元件,所述活动元件在变形期间以预定方式影响刀架的预定机械特性,特别是变形特性。因此,机械活性元件用于抵抗过程引起的变形,即c形刀架的弯曲开口。
5、在现代应用中,相应的c形刀架经常与多轴机器人结合使用。为此,c形保持器在连接件的部分的中心或在第一腿处(即在顶部)与连接件相邻处包括用于结合单元(用于结合到多轴机器人)的紧固部分。因此,关于相应的连接任务,c形刀架通常不仅垂直设置,而且以倾斜或水平的方式设置。
6、特别是在水平刀具位置,c形刀架由于其自重和驱动器的重量而自身变形,这对连接的中心性有很大影响。此外,还存在不同的其他干扰因素,例如导轨中的间隙或c形刀架的生产公差和材料厚度,这些因素可能导致偏离理想的操作点或接合点。由于对设置设备的要求越来越高,因此也必须考虑到这一点。
7、此外,应该考虑到,标准化组件通常与所谓的模块化原则结合使用,以应对成本、交付时间和开发工作方面的挑战。通常,在用于示例性设置装置的这种模块化系统内,对于c形刀架的每个变型,只有一个具有一个冲模圆顶和一个具有驱动单元的冲头的理想组合。换言之,每个c形刀架都包括具有给定的结合和给定的驱动重量的理想的操作点或连接点。实际操作点或连接点离理想操作点或连接点越远,连接的偏心率就越高。因此,模块化系统的所有进一步组合通常都有偏心率。
8、这意味着对中心性的要求越高,模块化系统可以实现的组合就越少。
9、这意味着,对于标准模块化系统不足以满足中心化要求的工具,将开发单独的特定解决方案。一方面,这些包括生产更刚性的c形刀架,尤其是具有更宽的框架结构。然而,这导致更高的成本、更高的重量以及由此产生的更高的干涉轮廓。这个问题也可以通过与例如多轴机器人的特定结合来解决。然而,这也导致了更高的成本和更高的重量,所以这仅对于一些组合是有利的。
10、总之,可以说已知的c形刀架的缺点是对中心性的要求限定了冲头与驱动单元和模具的组合可能性,并且需要使用特定的构造。后者伴随着建筑和生产成本高、交货时间长、储存成本高以及相应的更换库存和零件的一般维护工作的增加。
11、相对于中心性而言,更好的性能通常只能通过c形刀架的更大宽度来实现。由于所需的原材料和加工时间,c形刀架的干涉轮廓更高,自重更高,因此总重量也更高,这导致生产成本更高。由于更高的总重量,当将示例性设置装置结合到多轴机器人时,可能必须选择更高级别的机器人,这另外导致更高的成本。此外,额外的自重导致更高的变形,这抵消了更高刚性的优点。
12、因此,本发明的目的是提供一种c形刀架的替代解决方案,即使在水平工具布置中,该c形刀架也能以过程安全的方式满足与不同驱动单元相结合的连接中心性的要求,从而克服上述缺点。同样地,其任务是提供一种相应设置装置和用于设置c形刀架的偏移差的方法。
技术实现思路
1、上述目的通过根据独立权利要求1的c形刀架、根据独立权利要求10的具有c形刀架的设置装置以及根据独立权利要求12的用于设置c形刀架偏移差的方法来解决。有利的实施例和进一步的发展源于以下描述、附图以及附属权利要求。
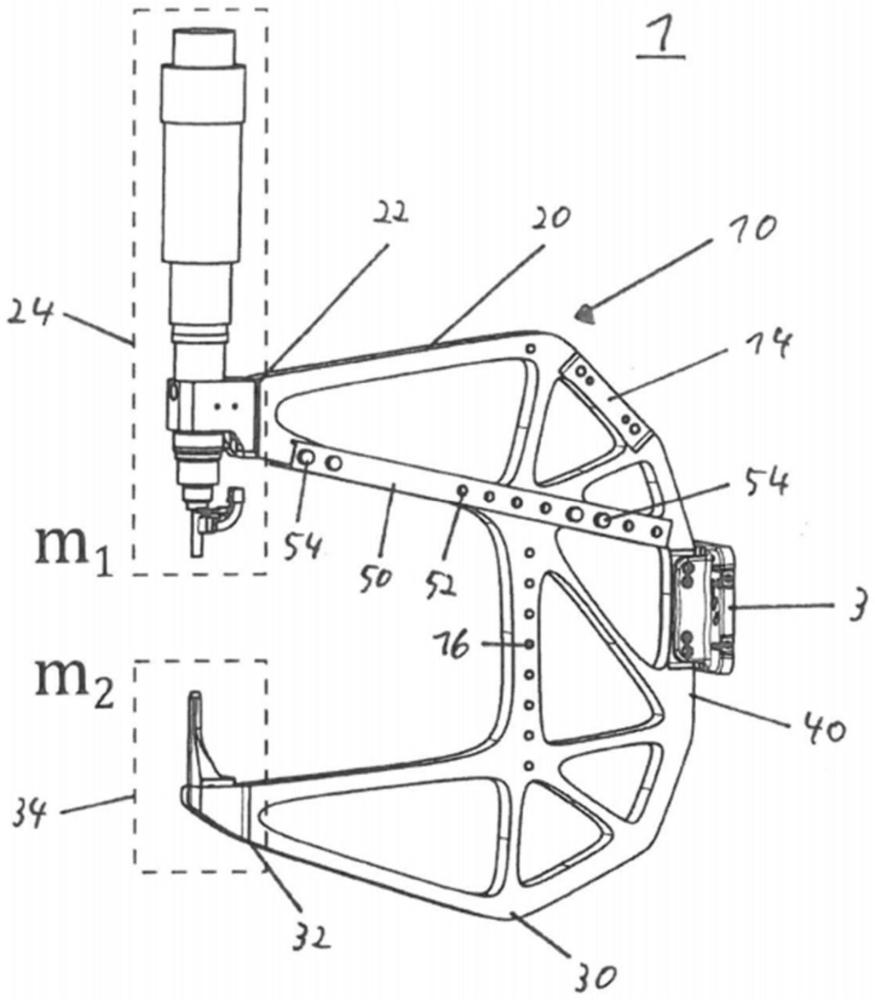
2、本发明的具有限定框架平面的框架结构的c形刀架包括第一支腿和与第一支腿相对设置的第二支腿,每个支腿包括连接端和操作端;连接件,第一支腿和所述第二支腿通过所述连接件在各自的连接端处彼此连接;其中所述第一支腿的所述操作端用于紧固具有相关联的驱动单元的冲头,所述驱动单元限定所述冲头在所述第二支腿的操作端的方向上的运动方向,并且所述第二支腿的操作端用于紧固冲模圆顶,其中所述第一支腿的所述操作端和所述第二支腿的所述操作端之间的由于重力的作用的垂直于框架平面的偏移差能够通过至少一个补偿元件最小化,所述补偿元件设置在以下元件中的一个或多个处:所述第一支腿、第二支腿或连接件,以及对应于所述冲头在第二支腿的操作端方向上的运动方向的第一直线和从所述第二支腿的所述操作端在第一支腿的所述操作端方向上延伸的第二直线的交叉点,能够通过所述至少一个补偿元件设置到操作点。
3、在下文中,将说明c形刀架在设置装置中使用时的情况。为此,c形刀架优选地具有类似框架的框架结构。由于在设置装置中的使用,具有相关驱动单元的冲头优选地固定在第一支腿的操作端,并且冲模圆顶固定在第二支腿的工作端。c形刀架与多轴机器人的结合例如通过用于结合单元的中心紧固部分进行。因此,结合单元设置在连接件的中心。
4、首先,假设一个垂直的工具位置。在该垂直工具位置,框架平面平行于重力延伸。换言之,对应于冲头在第二支腿的操作端方向上的移动方向的第一直线和第二直线是一致的。因此,第一直线和第二直线示例性地沿着第一轴,即笛卡尔坐标系的x轴延伸。y轴平行于第一支腿和第二支腿延伸。因此,x轴和y轴构成由框架结构定义的框架平面。
5、当相应的设置装置现在布置在水平位置时,驱动单元在第一支腿处的重量导致第一支腿的操作端由于重力而偏移出框架平面,即沿着z轴偏移。为此,第一支腿在y方向上的悬臂是必然的,即第一支腿的长度或第一支腿操作端与结合单元之间沿y轴的距离。这同样适用于具有冲模圆顶的第二支腿的操作端。
6、由于冲模圆顶的重量与驱动单元相比较低,因此第二支腿的操作端的重力引起的偏移低于第一支腿的重力造成的偏移。换言之,当仅考虑该效应时,第一直线和第二直线彼此平行地延伸,但不再以全等的方式延伸。因此,重力引起的偏移差出现在第一支腿的操作端和第二支腿的工作端之间,这需要补偿。
7、此外,第一和第二支腿的悬臂将被考虑,这是由于沿着x轴的示例性中心附接而产生的,因为这些悬臂导致与重力引起的偏移不同的角度偏移,由此第一直线和第二直线不再彼此平行地延伸,而是在一个交叉点处相交。然而,该交叉点不一定对应于设置装置的操作点,因此在这里,也需要相应的设置或校正。
8、为了补偿这些影响,提供了至少一个补偿元件。在本示例中,由于重力引起的偏移较高,优选地以可释放的方式,例如通过螺钉、销、夹具或夹子,将其固定到第一支腿上,因为尤其是可释放的紧固类型,其提供了在使用具有驱动单元的另一冲头和/或另一冲模圆顶时考虑重力引起的变化的偏移的可能性。此外优选的是,c形刀架包括两个补偿元件,优选地在同一元件的相对侧上,即这里的第一支腿上。以这种方式,第一支腿的变形以第一直线和第二直线在操作点相交或交叉的方式与第二支腿的变形相适应。
9、在刀架在第一腿的部分中示例性地附连到多轴机器人的情况下,即在上部结合的情况下的情况中,优选地,至少一个补偿元件布置在连接件处。其原因是悬臂,其由于不同的结合而沿着第一和第二支腿的x轴和y轴变化,以及由此产生的第一和第二支腿的变化变形。关于细节,参考详细描述。
10、这种方法的一般优点是可以实现c形刀架形式的立式模块化工具的偏心率的后续设置。因此,所述至少一个补偿元件优选地可变地紧固到以下元件之一:第一支腿、第二支腿或连接件。有利的是,可以以这种方式实现对示例性设置装置中的下支架的间隙的补偿。
11、通过以这种方式实现的设置的可能性,可以另外单独设置冲模圆顶和c形刀架的多个组合的中心度。因此,模块化系统的使用仍然是可能的,其中与现有技术相比,可以实现具有驱动单元的冲头和冲模圆顶的附加组合。
12、此外,c形刀架可以不那么刚性,并且可以减少c形刀架的自重。此外,这意味着c形刀架的宽度可以减小,这也导致干涉轮廓的减小。此外,这对制造成本有积极影响,因为在c形刀架宽度减小的情况下,制造成本也会降低。
13、根据c形刀架的优选实施例,所述至少一个补偿元件在横截面中具有第一轴向几何惯性矩和大于第一轴向几何惯性矩的第二轴向几何惯性矩,并且所述至少一个补偿元件被布置为使得所述第二轴向几何惯性矩垂直于所述框架平面作用。在轴向几何惯性矩的情况下,考虑了至少一个补偿元件在加载时的变形的横截面依赖性。在这种情况下,所述至少一个补偿元件的变形越小,轴向几何惯性矩越大。因此,将所述至少一个补偿元件布置在第一支腿、第二支腿或连接件中的一个上,使得重力导致较低的变形。因此,较大的轴向几何惯性矩垂直于框架平面作用。为了更好地理解,基于截面为矩形的补偿元件来解释这种方法。在横截面中,其高度h大于其宽度b。
14、在第一种情况下,该矩形补偿元件例如布置在第一支腿,使得高度h平行于最初定义的笛卡尔坐标系的x轴延伸,从而平行于框架平面延伸。因此,宽度b平行于z轴延伸,即在框架平面之外。在围绕平行于x轴的轴的变形的情况下,即在重力引起的变形的情形下,补偿元件的轴向几何惯性矩因此计算如下:
15、在第二种情况下,补偿元件示例性地布置在第一支腿,使得宽度b平行于x轴延伸,现在使得高度h延伸超过z轴超出框架平面。在绕平行于x轴的轴线发生变形的情况下,即在重力引起变形的情况中,轴向几何惯性矩的计算如下:
16、只有在第二种情况下,当高度h大于宽度b时,较大的轴向几何惯性矩才垂直于框架平面作用。在第一种情况下,较大的几何惯性矩作用于框架平面,即在围绕平行于z轴的轴线变形的情况下。
17、由于补偿元件的这种优选对准,至少一个补偿元件对例如第一支腿具有这样的加强作用,使得第一支腿和第二支腿之间的偏移差最小化,并且第一直线和第二直线之间的交叉点对应于示例性设置装置的操作点。
18、此外优选的是,补偿元件具有截面上具有以下形状之一的轮廓形状:矩形、半圆、圆形层或圆形区域、三角形、t形、双t形、l形、u形、梯形或其组合。尤其是这些形状在一个方向上具有特别高的轴向几何惯性矩。因此,通过这些形状可以特别有利地实现本发明。
19、在c形刀架的另一有利实施例中,至少一个补偿元件包括至少两个紧固点,优选至少四个、六个、八个或十个紧固点并且特别优选多个紧固点。特别是当使用多个紧固点时,从四个紧固点开始,优选地,两个紧固点各自直接相邻地定位(例如在至少一个补偿元件的端部处)。由于使用了两个彼此直接相邻的紧固点,因此可以进一步抵消由操作力引起的c形刀架的弯曲开口。
20、另外优选的是,补偿元件具有中空轮廓或碗形轮廓的形状,并且此外,在补偿元件与第一支腿、第二支腿或连接件之间存在两个槽螺母。一方面,槽形螺母防止至少一个补偿元件的变形,从而失去其积极特性(positive properties)。另一方面,几何惯性矩可以进一步受到槽螺母尺寸的影响。在这种情况下,可以参考平行轴定理/斯坦纳定理。除此之外,稍后将参考详细描述和附图来更清楚地说明这一点。
21、本发明的设置装置包括本发明的c形刀架,其中具有相关联的驱动单元的冲头被紧固在第一支腿的操作端,并且冲模圆顶被紧固在第二支腿的工作端。在关于本发明的c形刀架的讨论中已经详细说明了相应的设置装置。为了避免不必要的重复,因此参考关于技术效果和优点的相应说明。
22、有利地,设置装置通过c形刀架紧固到多轴机器人上。以这种方式,设置装置可以在不同的方向上使用,例如在自动化生产线中。
23、一种用于设置本发明的c形刀架的第一支腿和第二支腿之间的偏移差的本发明方法包括以下步骤:以框架平面垂直于重力对齐的方式布置c形刀架,确定所述第一支腿相对于所述框架平面的第一偏移,并确定所述第二支腿相对于该框架平面的第二偏移,之后,将至少一个补偿元件紧固到以下部件中的一个或多个:第一支腿、第二支腿或连接件,以及使第一支腿的操作端和第二支腿的工作端之间的偏移差最小化。关于本发明的方法,也参考了以上关于本发明c形刀架的陈述,特别是关于所产生的技术效果和优点。
24、在一个有利的实施例中,该方法还包括以下步骤:通过所述至少一个补偿元件将对应于冲头在第二支腿的操作端的方向上的运动方向的第一直线和从所述第二支腿的所述操作端在第一支腿的所述操作端方向上延伸的第二直线的交叉点设置至操作点。通过该步骤,不仅考虑重力引起的偏移差,还考虑当前的角度偏移。
25、还优选的是至少一个补偿元件在横截面中包括第一轴向几何惯性矩和大于第一轴向几何惯性矩的第二轴向几何惯性矩,并且进行紧固步骤,使得补偿元件以第二轴向几何惯性矩垂直于框架平面作用的方式布置。这种方法使得至少一个补偿元件所布置的相应元件得到加强,并且通过这样做,实现偏移差的补偿,并且将第一直线和第二直线的交叉点设置为操作点。关于这一点,还参考了c形刀架的优选实施例和截面为矩形的补偿元件的相关示例的相应的上述说明。
26、此外,有利的是,所述至少一个补偿元件经由至少两个紧固点紧固到以下元件中的一个或多个:第一支腿、第二支腿或连接件。当使用多个紧固点时,从四个紧固点开始,可以考虑操作力引起的c形刀架的弯曲开口,并且优选地将其最小化。
27、在该方法的另一优选实施例中,所述至少一个补偿元件优选地通过螺钉、销、夹具或夹子可释放地紧固到第一支腿、第二支腿或连接件。尤其是可释放的紧固件,其允许刀架适应具有驱动单元的不同冲头和冲模圆顶,因此,适应相应的重量是可能的。因此,模块化原则仍然适用。
28、最后,所述至少一个补偿元件有利地具有中空轮廓或碗形轮廓的形状,并且在所述补偿元件与所述第一支腿、所述第二支腿或所述连接件之间存在至少两个槽螺母。如上所述,一方面,槽螺母阻止至少一个补偿元件变形,从而在紧固时失去其积极特性。另一方面,几何惯性矩可以通过槽螺母的尺寸来进一步影响。
- 还没有人留言评论。精彩留言会获得点赞!