一种柔索并联驱动的刚柔耦合机器人
背景技术:
1、焊接工作环境恶劣,劳动强度大,对工种的技术水平有较高的要求,对操作人员有一定的危险性。在焊接中,复杂平面结构经常出现,并且在三维空间多表现出复杂的表面,串联式工业机器人承载能力和刚度往往难以达到需求,并且对复杂表面的焊接具有一定的难度。因此焊接的主机构越来越多的选择并联机器人,但传统的并联机器人在工作过程中转动惯量大并且响应较慢,从而使其灵活性受限等问题,所以需要一款能够适应复杂表面的焊接机器人。
2、通过专利检索,存在以下已知的技术方案:
3、中国文献专利号“cn217167119u”提出了一种新型焊接机器人,通过调节挡板组件的位置,能够起到焊接过程中阻挡并吸收向外飞溅的火花的作用,提高了装置的使用效果和使用的安全性。但由于挡板组件的位置和形状的限制,这种方式无法在对复杂曲面的焊接过程中进行使用。
4、中国文献专利号“cn216990511u”提出了一种表面焊接质量高的焊接机器人,通过调节机构驱动滑动板沿水平方向滑动,从而实现对焊接机器人主体的移动,能够对焊接机器人主体的位置进行调节,提高了焊接机器人主体的工作效率。但以这种移动方式进行焊接时,对复杂曲面以及不规则形状的材料进行焊接时较为困难。
5、因此需要一款能够灵活适应复杂表面,惯量小,相应快的焊接装置。本发明设计的一种柔索并联驱动的刚柔耦合焊接机器人,采用柔索牵引的形式驱动末端执行器,代替了传统刚性并联机构的刚性驱动,因此柔索并联驱动的机器人具有运行速度快、负载能力强、惯性小等特点,使得该装置能够灵活适应复杂平面的焊接工作。
技术实现思路
1、本发明为克服上述现有技术的不足之处,提供了一种柔索并联驱动的刚柔耦合机器人,其特点是能够解决响应速度慢及灵巧度的问题,能够应对复杂曲面,对不规则形状的材料进行焊接,大大提高焊接设备的适应性问题。
2、为了实现上述目的,本发明采用如下的设计方案:
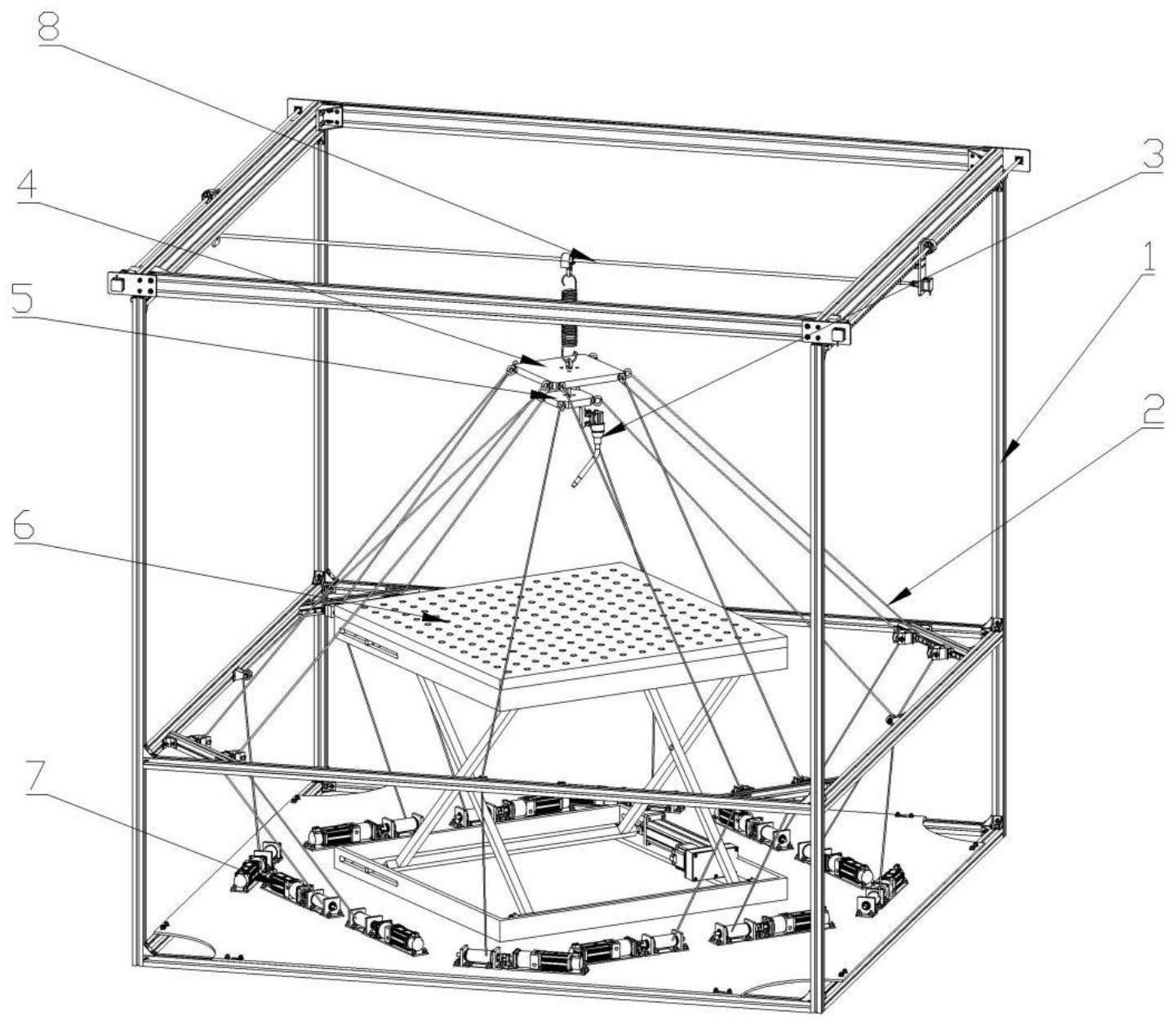
3、一种柔索并联驱动的刚柔耦合机器人,包括主体框架、柔索组、焊枪、平动平台、转动平台、焊接平台、驱动装置、自动拉紧装置。其中,驱动装置和焊接平台安装在主体框架的底板上。自动拉紧装置安装在主体框架顶部。平动平台和自动拉紧装置之间由弹簧连接,安装在自动拉紧装置下方。转动平台和平动平台之间由球铰连接,安装在平动平台下方。焊枪固定在转动平台下方。柔索组下端连接在驱动装置上,通过主体框架的滑轮组与平动平台和转动平台的吊环相连接。驱动装置驱动柔索组,通过柔索组控制转动平台和平动平台,并利用自动拉紧装置保证柔索的受力,最后实现焊枪对焊接平台上焊件的加工。
4、本发明的具体方案为:
5、一种柔索并联驱动的刚柔耦合机器人,由主体框架1、柔索组2、平动平台4、转动平台5、驱动装置7、自动拉紧装置8组成。其中,
6、在主体框架1的底部设有驱动装置7,在主体框架1的顶部设有自动拉紧装置8。
7、自动拉紧装置8经平动平台4与转动平台5相连接。
8、通过柔索组2将平动平台4、转动平台5分别与驱动装置7相连接。
9、主体框架1负责安装该机器人的各个零件。柔索组2负责调整末端执行器的位置与姿态。平动平台4负责控制末端执行器的平动自由度。转动平台5负责控制末端执行器的转动自由度。驱动装置7负责驱动柔索组进行作业。自动拉紧装置8负责防止柔索松弛而产生干扰。
10、进一步说,所述的一种柔索并联驱动的刚柔耦合机器人还包括:焊枪3和焊接平台6。其中,转动平台5的底部设有焊枪3。在主体框架1的底部设有焊接平台6。焊枪3负责对工件进行加工处理。焊接平台6负责放置焊件并调整焊件位置。
11、进一步说,主体框架1包含一块底板103。驱动装置7和焊接平台6安装在底板103上。
12、进一步说,驱动装置7包含卷绳机构a701和卷绳机构b702。焊接平台6被驱动装置7的卷绳机构所围绕。
13、自动拉紧装置8包括一个弹簧809。弹簧809与平动平台4相连接。
14、转动平台5和平动平台4之间由球铰512连接。焊枪3固定在转动平台5下方。柔索组2下端与驱动装置7连接,经过滑轮组a102与平动平台4连接,经过滑轮组b104与转动平台5连接。
15、柔索组2的一端与驱动装置7连接。驱动装置7固定在主体框架1的底部,驱动装置7的卷绳机构呈正方形或矩形排布。
16、主体框架1包括有滑轮组a102和滑轮组b104。在平动平台4上设有吊环a402、吊环b403和吊环c404,在转动平台5上设有吊环a502。
17、柔索组2经滑轮组a102与吊环a402、吊环b403相连接。
18、柔索组2经滑轮组b104与吊环a502相连接。
19、使用时,驱动装置7驱动与之相连的柔索组2,通过柔索组2控制转动平台4和/或平动平台5的活动。柔索组2分为柔索a201、柔索b202、柔索c203。
20、在对应的平动平台4的之间设有一组/一对柔索a201和柔索b202。即设有4组柔索a201和柔索b202,计有柔索a201和柔索b202共8根。即柔索a201和b202都是与平动平台4相连的。
21、在同一组内的柔索a201和柔索b202形成平行四边形结构。其中,柔索a201的上端与平动平台4的吊环a402相连,柔索a201的中部与相邻的滑轮组a102相连,柔索a201的下端与相邻的驱动装置7的卷绳机构相连。
22、柔索b202的上端与平动平台4的吊环a402相连,柔索b202的中部与相邻的滑轮组a102相连,柔索b202的下端与相邻的驱动装置7的卷绳机构相连。
23、余下3组柔索a201和柔索b202的结构与前述相同。四组柔索关于框架中心呈中心对称。
24、在对应的转动平台5拐角之间设有一根柔索c203。即柔索c203共有四根。每个柔索c203的下端均与相邻的驱动装置7的卷绳机构相连,柔索c203的中间与滑轮组b104相连,柔索c203的上端与相邻的转动平台5的吊环d502相连。通过自动拉紧装置8保证柔索a201、柔索b202、柔索c203的受力,最后实现焊枪3对焊接平台6上焊件的加工。柔索c只与转动平台相连。
25、进一步说,主体框架1包括外框架101。外框架101为一个矩形框架。外框架为型材构成的框架。所述型材为铝型材、钢型材或合金型材。各个型材之间采用角码用t型螺母和内六角螺栓连接。
26、主体框架1中下部由四个横置型材连接而成,用于放置滑轮组a(102)和滑轮组b104。
27、在主体框架1中设有铝型材。所述铝型材有4个。铝型材与框架呈45°斜切。该铝型材用于安装滑轮组a(102)。底板103用t型螺栓与法兰螺母固定在框架底部,用于放置驱动装置7和焊接平台6。
28、进一步说,滑轮组a102和滑轮组b104结构相同,均分别由滑轮113、滑轮支架112和滑轮导轨111组成,滑轮支架112通过螺栓114固定在滑轮导轨111上,滑轮113安装在滑轮支架112上。
29、进一步说,焊接平台6由焊接板601、上底版602、连杆组603、下底板604、电动缸605和电动缸连杆606组成。
30、焊接板601用于放置焊件,通过连杆组603连接上底板602和下底板604,电动缸605固定在下底板604上,在下底板604的侧边设有水平槽,通过驱动电动缸连杆606在水平槽的横向移动,实现焊接平台6的纵向伸缩,使焊件位置达到焊枪3的工作空间。
31、进一步说,驱动装置7共有12个,均为卷绳机构。
32、其中8个记为卷绳机构a,每2个一组排列,构成矩形或方形。
33、余下4个记为卷绳机构b,布置在由卷绳机构a构成矩形或方形的四角。
34、驱动装置7用于驱动柔索a201、柔索b202和/或柔索c203。
35、进一步说,驱动装置7均由伺服电机711、减速器712、联轴器713和卷筒714组成。伺服电机座715和卷筒座716通过螺栓安装在主体框架1的底板103上,伺服电机711固定在伺服电机座715上,卷筒714固定在卷筒座716上,伺服电机座715和卷筒座716在水平方向上保持一致,均固定在底板103上。伺服电机711与减速器712相连,减速器712与卷筒714通过联轴器713连接,当伺服电机711正反转时,通过减速器712带动卷筒714工作,从而实现柔索a201、柔索b202和/或柔索c203的伸缩运动。
36、进一步说,自动拉紧装置8包括滚珠丝杠a803、滚珠丝杠b808、步进电机a801、步进电机b805、弹簧809、螺母座a807、螺母座b810、步进电机座802、滑板806和直线导轨804。
37、步进电机a801设有1个,步进电机a801驱动滚珠丝杠a803,步进电机b805设有1个,步进电机b805驱动滚珠丝杠b808。
38、步进电机a803安装在步进电机座802上,并通过联轴器连接滚珠丝杠a803,滚珠丝杠a803通过螺母座a807固定在滑板806上。设有两个直线导轨804,对称分布在主体框架1上部的两侧。每个直线导轨804均与一个滑板806活动连接。滑板806一方面可以滑动,另一方面也是用来固定电机的。即滑板806可沿着直线导轨804进行滑动。在两个滑板806之间通过螺母座a807连接一根滚珠丝杠b808,螺母座b810安装在滚珠丝杠b808上,用于连接弹簧809,并由安装在滑板806上的步进电机b805驱动,实现螺母座b810在滚珠丝杠b808上的移动。
39、进一步说,平动平台4包括一块平动平板401。平动平板401呈正方形。在平动平板401的四角各安装了2个吊环a402,每两个吊环a402一组,用来连接柔索a201和柔索b202,在平动平板401的中央设有一个吊环c404,用来连接弹簧810,使平动平台4和自动拉紧装置8相连接。
40、进一步说,转动平台5包括转动平板501和吊环d502。转动平板501呈正方形,在转动平板501的四角各安装一个吊环d502,用来连接柔索c203。万象球轴承511安装在平动平台4的正下方,球铰512安装在万象球轴承511中,球铰512下方通过连接杆513与转动平台5连接在一起。焊枪3与转动平台5焊接在一起。
41、进一步说,柔索组由4根柔索a201、4根柔索b202和4根柔索c203组成,1根柔索a201和1根柔索b202为一组,柔索a201和柔索b202的下端与驱动装置7的卷绳机构相连,中间与滑轮组a102相连,上端与平动平台4的吊环a402和吊环b403相连,与柔索a201和柔索b202相同的结构还有三组,四组柔索关于框架中心呈中心对称,在运动过程中,每组柔索总是保持平行四边形的形状,限制了转动自由度。柔索c203通过卷筒和滑轮组b连接到转动平台的吊环d502上,使转动平台能在柔索的带动下在一定转角范围内转动。补充地说,滑轮组a的两个滑轮之间的距离和对应的平动平台吊环之间的距离相等,在加上两根平行柔索,形成平行四边形的结构。该结构下方柔索结构与驱动装置连接的部分,在结构上与控制平动自由度没有关系,只要上边形成的是平行四边形,就不会产生转动自由度。
42、进一步说,在刚柔耦合机器人上设有传感器,包括拉线位移传感器、角速度传感器、测力传感器和视觉传感器。其中,拉线位移传感器有四个,安装在与柔索a201相连的驱动机构7上。角速度传感器有四个,安装在与柔索c203相连的驱动器7上。测力传感器有八个,分别安装在柔索a201和柔索c203上。视觉传感器有一个,安放主体框架1的竖直型材上。
43、上述传感器器经运动控制卡板的反馈输入端与工控机连接。柔索并联驱动的刚柔耦合机器人输出端焊枪3与运动控制电路连接。
44、进一步说,本机器人的控制方法,包括以下几个步骤:
45、步骤一:进行系统的初始化,检测各个模块之间的网络通讯状况是否良好,人工输入末端执行器的初始坐标,将待焊接工件放置于固定位置,并确定工件的位置参数,输入控制系统上位机中。
46、步骤二:开启传感器单元,检测安装在焊接机器人上的各种传感器与反馈各类信号的实时状态。
47、步骤三:上位机依据工件的位置参数,确定工作空间主要区域位置,焊接平台6自动调节高度,使待焊接工件移动至合适高度。
48、步骤四:将待焊接工件的形状姿态参数输入上位机进行分析。
49、步骤五:根据待焊接工件的大致形状姿态参数,在上位机的控制下,驱动卷绳机构a701和卷绳机构b702调整出索点位置,从而适应不同形状、大小的工件的加工需求。
50、步骤六:驱动装置7带动柔索组2长度的长短变化,从而控制平动平台4和转动平台5的运动。
51、步骤七:在平动平台4和转动平台5运动过程中,焊枪3跟随其运动,并完成当前可行的工作空间的焊接任务。拉力传感器、转角传感器等进行数据采集输出至上位机,从而控制驱动装置随末端运动进行调整,确保不存在干涉等影响运动的情况。
52、步骤八:在工件较大时,可能机器人并不能通过一次焊接工作而完全覆盖整个工件,从而无法完成整体的焊接任务,此时可通过调整焊接平台6的高度和焊件在焊接平台6上的位置,从步骤三重新开始,直至完成整个工件的焊接工作。
53、采用本发明所述的一种柔索并联驱动的刚柔耦合焊接机器人的整体工作过程:自动拉紧装置可使柔索始终绷紧,该装置的弹簧由三组步进电机驱动的滚珠丝杠机构带动,实现x、y两个方向的平动自由度,使弹簧始终保持竖直状态与平动平台相连。柔索通过驱动装置的卷筒经过滑轮组导向,连接到平动平台和转动平台,实现末端执行器焊枪的5个自由度,可控制焊枪对焊接平台上的焊接进行焊接工作,由于焊接平台使可伸缩的,使得焊枪可在自身的工作空间内进行工作。
54、本发明所述的一种柔索并联驱动的刚柔耦合焊接机器人,装置整体由不同模块组成,整体大小为长2.5米,宽2.5米,高2.5米。
55、本发明的优点是:
56、1.本发明采用设计了一种柔索驱动的焊接机器人,采用柔索牵引的形式驱动末端执行器,对与复杂曲面和不规则形状的材料进行焊接时,能够轻松应对,解决了工作空间小以及灵巧度的问题。
57、2.本发明将自动拉紧装置与平动平台之间用弹簧进行连接,使弹簧始终与平动模块的中心线保持大致的竖直状态,能够保证柔索始终是紧绷的,使得弹簧始终是单一方向受力,防止了在焊接过程中因柔索的松弛而对焊接工作产生干扰。
58、3.本发明的柔索一共有12根,其中8根和平动平台的吊环相连,每两根为一组,在运动过程中,每组柔索总是保持平行四边形的形状,限制了转动自由度,只具有沿x、y、z的平移自由度,另外4根和转动平台的吊环相连,控制绕x、y的转动自由度,通过对柔索位置的合理布置,防止各个柔索之间发生干涉。
59、4.本发明设计了一种可伸缩式的焊接平台,通过焊接平面的上下移动,可以保证焊枪在规定的工作空间内能够很好的进行焊接。
- 还没有人留言评论。精彩留言会获得点赞!