一种基于人工智能的自动焊接执行装置的制作方法
本发明属于钢管焊接,具体地说是一种基于人工智能的自动焊接执行装置。
背景技术:
1、管道焊缝焊接装置是对管道进行焊接的装置,随着时代技术的变迁,人们对管道焊缝焊接装置的要求也是越来越高。
2、在日常生活中经常会需要人工进行焊接,人工焊接效率低、焊接不均匀,焊条不能被合理使用、人工焊接对眼部伤害较大以及容易造成烫伤。
3、在公开号为cn108942012a的中国专利中,提到了一种换热器管板接头环缝自动焊接设备,该发明通过其包括定位机构、转动机构、步进电机、延伸板、焊枪夹持器以及焊枪,所述焊枪夹持器通过延伸板固定在转动机构上,所述焊枪固定在焊枪夹持器上,对钢管进行焊接。
4、但是,该发明的直接利用焊枪对钢管进行焊接,使钢管焊接精准度下降,难以精确定位焊缝并进行焊接操作。
5、对此,发明人提出一种基于人工智能的自动焊接执行装置,用以解决上述问题
技术实现思路
1、为了解决上述技术问题,本发明提供一种基于人工智能的自动焊接执行装置,以解决现有技术中问题。
2、一种基于人工智能的自动焊接执行装置,包括传动机构以及执行机构,所述传动机构具有两个,所述传动机构包括底板,所述底板上表面相对固定安装有两个安装架,两个所述安装架外表面均滑动连接有滑动架,所述执行机构包括固定安装在滑动架上表面的支架,所述支架上表面固定安装有电气控制系统柜,所述支架上表面固定安装有机器人,所述机器人顶端固定安装有焊接枪,所述机器人顶端固定安装有激光传感器。
3、优选的,所述执行机构还包括固定安装在焊接枪外表面的支撑架,所述支撑架内表面固定安装有相机。
4、优选的,所述支架一侧表面固定安装有操作板。
5、优选的,所述电气控制系统柜与机器人、焊接枪、激光传感器、相机以及操作板均电性电线连接。
6、优选的,所述传动机构还包括设置在底板上表面两个驱动皮带,两个驱动皮带分别与若干滑动架连接。
7、优选的,所述滑动架上表面固定安装有夹持转动组件,所述夹持转动组件内表面夹持有钢管。
8、优选的,所述底板上表面固定安装有控制面板。
9、与现有技术相比,本发明具有如下有益效果:
10、1、本发明通过电气控制系统柜控制机器人,使机器人带动前端的焊接枪在钢管上进行焊接,并且与激光传感器以及相机进行相互配合,进行焊接工作,通过激光传感器用于检测焊缝的位置和形状,以便机器人能够精确定位并进行焊接操作,相机能够实时拍摄焊接过程以及焊缝的位置和形状,并将画面显示出,以便工作人员能够及时观看焊缝的位置和形状,避免出现设置差错,通过机器人、焊接枪、激光传感器以及相机能够提高自动焊接的精确性,实现高精度的焊接操作。
技术特征:
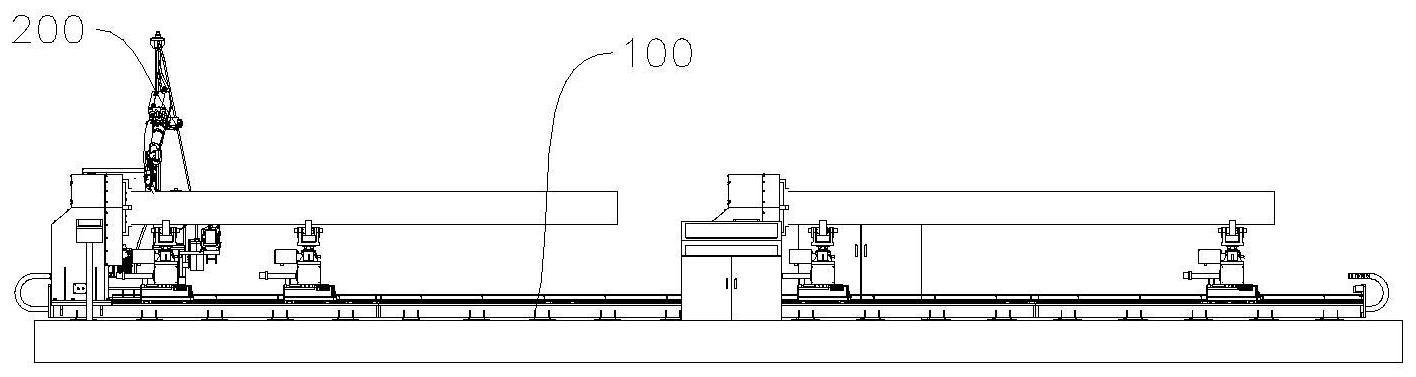
1.一种基于人工智能的自动焊接执行装置,包括传动机构(100)以及执行机构(200),所述传动机构(100)具有两个,所述传动机构(100)包括底板(101),所述底板(101)上表面相对固定安装有两个安装架(102),两个所述安装架(102)外表面均滑动连接有滑动架(103),其特征在于:所述执行机构(200)包括固定安装在滑动架(103)上表面的支架(201),所述支架(201)上表面固定安装有电气控制系统柜(202),所述支架(201)上表面固定安装有机器人(203),所述机器人(203)顶端固定安装有焊接枪(204),所述机器人(203)顶端固定安装有激光传感器(205)。
2.如权利要求1所述一种基于人工智能的自动焊接执行装置,其特征在于:所述执行机构(200)还包括固定安装在焊接枪(204)外表面的支撑架(206),所述支撑架(206)内表面固定安装有相机(207)。
3.如权利要求1所述一种基于人工智能的自动焊接执行装置,其特征在于:所述支架(201)一侧表面固定安装有操作板(208)。
4.如权利要求3所述一种基于人工智能的自动焊接执行装置,其特征在于:所述电气控制系统柜(202)与机器人(203)、焊接枪(204)、激光传感器(205)、相机(207)以及操作板(208)均电性电线连接。
5.如权利要求1所述一种基于人工智能的自动焊接执行装置,其特征在于:所述传动机构(100)还包括设置在底板(101)上表面两个驱动皮带(104),两个驱动皮带(104)分别与若干滑动架(103)连接。
6.如权利要求1所述一种基于人工智能的自动焊接执行装置,其特征在于:所述滑动架(103)上表面固定安装有夹持转动组件(105),所述夹持转动组件(105)内表面夹持有钢管(106)。
7.如权利要求1所述一种基于人工智能的自动焊接执行装置,其特征在于:所述底板(101)上表面固定安装有控制面板(107)。
技术总结
本发明属于钢管焊接技术领域,提供了一种基于人工智能的自动焊接执行装置,包括传动机构以及执行机构,传动机构具有两个,传动机构包括底板,底板上表面相对固定安装有两个安装架,两个安装架外表面均滑动连接有滑动架,执行机构包括固定安装在滑动架上表面的支架;本发明通过电气控制系统柜控制机器人,使机器人带动前端的焊接枪在钢管上进行焊接,并且与激光传感器以及相机进行相互配合,进行焊接工作,通过激光传感器用于检测焊缝的位置和形状,以便机器人能够精确定位并进行焊接操作,相机能够实时拍摄焊接过程以及焊缝的位置和形状,并将画面显示出,以便工作人员能够及时观看焊缝的位置和形状,避免出现设置差错。
技术研发人员:王永强,周文,沙新明,孙聪聪,康承飞,夏浩,陈昱杉
受保护的技术使用者:招商局重工(江苏)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!