一种柱钉辊套粘钉机器人的制作方法
本发明属于柱钉辊套,尤其涉及一种柱钉辊套粘钉机器人。
背景技术:
1、众所周知,柱钉辊作为辊压机的核心配件之一,为辊压机提供高耐磨、高抗压强度的特性,可以满足不同工况的使用要求。柱钉辊套采用耐磨合金复合辊套并进行钻、铰孔工序后,工作辊面采用镶嵌硬质合金柱钉的方式制造,柱钉辊套表面需要镶嵌装配的柱钉数量非常多,在柱钉的粘钉过程中,工艺流程主要为:柱钉孔的清洗、点胶、放垫、点胶、放柱钉、旋压、检测等工序;由于传统的方式是采用手工清洗、点胶、插入,随后利用锤击装配;这种传统工艺过程存在如下的缺陷:
2、一、粘钉工艺复杂,人工操作失误率高;比如,忘记点胶,造成安装不牢固,柱钉脱落的问题,点胶过量,造成流胶;
3、一、劳动强度大,由于柱钉辊套套上需要嵌入成千上万的柱钉,因此人工嵌入的方式需要耗费大量的时间和人力;
4、二、人工操作容易发生遗漏的事故;由于柱钉孔的数量巨大,因此难免发生遗漏的事故;
5、人工操作时,锤击的力度难以把握,因此导致柱钉的牢固程度不同,高度不同,影响最终的质量。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种能够实现柱钉及柱钉垫的自动上料、清扫、点胶、旋压的柱钉辊套粘钉机器人。
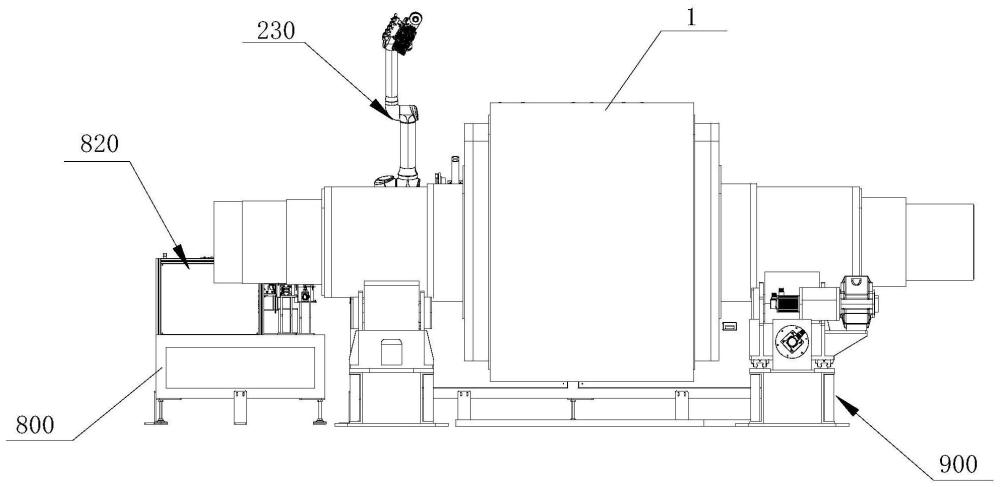
2、本发明是这样实现的,一种柱钉辊套粘钉机器人,其特征在于:包括床身,所述床身包括床身机架,所述床身机架上安装有自动粘钉机架组件,所述自动粘钉机架组件包括上层移动导轨和下层移动导轨,在床身机架内所述上层移动导轨的侧面安装有上层传动齿条;在床身机架内所述下层移动导轨的侧面安装有下层传动齿条;上层移动导轨上安装有协同机器人底座,协同机器人底座上安装有机器人行走电机,机器人行走电机的输出端安装有与上层齿条啮合的机器人行走齿轮;协同机器人底座上安装有协同机器人,协同机器人的机械臂的端部安装有机械手法兰基板,所述机械手法兰基板上安装柱钉抓取机构和柱钉垫抓取机构;上层移动导轨上安装有安装有点胶装置和旋压装置,其中,点胶装置用于在柱钉和柱钉垫放置前箱柱钉孔内注入胶液;旋压装置将协同机器人抓取的柱钉和柱钉垫压紧在柱钉辊套柱钉孔内;下层移动导轨上安装有3d相机采集装置和打磨清洗喷吹装置,其中,3d相机采集装置用于拍摄柱钉辊套上的某一个柱钉孔实际位置;打磨清洗喷吹装置,用于对柱钉辊套柱钉孔在点胶前进行打磨和清扫;在协同机器人侧还设有上料平台,所述上料平台安装有相互独立的柱钉上料单元和柱钉垫上料单元;在床身的侧面安装有托辊总成,用于支撑柱钉辊套。
3、优选的,所述柱钉垫抓取机构包括上部夹持块,所述上部夹持块安装有电磁铁安装块,电磁铁安装块内嵌装有电磁铁,靠近上料侧所述电磁铁安装块上设有柱钉垫定位槽;所述机械手法兰基板上安装有推压机构;推压机构包括双杆气缸,双杆气缸的活塞杆连接推板,所述推板上安装有六个推杆。
4、优选的,所述柱钉抓取机构包括取料板,取料板通过连杆连接机械手法兰基板,取料板上安装有六个柔性爪,每个柔性爪均包括两个相对设置的夹持块,夹持块连接双向气缸来实现夹持动作;在取料板的一端安装有2d相机安装板,2d相机安装板上安装有2d相机,2d相机用于采集柱钉辊套上柱钉孔的位置。
5、优选的,机械手法兰基板上还安装有粘钉保护支架,所述粘钉保护支架上安装有用于检测推杆位置极限位置的检测传感器,起到了柔性防护作用,防止超行程推送柱钉垫和柱钉。优选的,在上层移动导轨上的直线轨道滑行座;直线轨道滑行座侧面安装有行走电机,所述行走电机的输出端安装有与上层齿条啮合的行走齿轮;直线轨道滑行座的上方安装有点胶旋压进给基板,点胶旋压进给基板上安装点胶装置和旋压装置;点胶旋压进给基板与直线轨道滑行座之间设有直线轨道,点胶旋压进给基板上安装点胶旋压进给行走电机,点胶旋压进给行走电机的输出端安装有点胶旋压进给行走齿轮,在点胶旋压进给基板与直线轨道滑行座之间设有与点胶旋压进给行走齿轮啮合的齿条;点胶旋压进给基板的一侧安装有旋转升降机构;所述旋转升降机构包括与点胶旋压进给基板垂直设置的四个升降柱,在点胶旋压进给基板的下方安装升降电机,升降电机通过丝杠螺母副连接旋转升降基板,旋转升降基板的一侧设置有旋转装置。
6、所述旋转装置包括贯通轴丝杠式步进电机,步进电机的输出端连接齿条,所述齿条安装在直线滑轨的滑块上,齿条的上部啮合有从动齿轮,从动齿轮安装在从动轴上,所述从动轴安装旋转轴承座上,旋转轴承安装在旋转升降基板上,旋转升降基板上安装点胶旋压进给基板。优选的,所述点胶装置包括点胶基板,所述点胶基板上安装点胶气缸,点胶气缸的输出端连接点胶推板,点胶推板连接点胶阀固定板,点胶阀固定板上安装有气动可以调节流量的气动点胶阀,气动点胶阀连接点胶桶和高压气源,点胶桶安装在点胶旋压进给基板上,点胶桶连接高压气源,通过高压气源向气动点胶阀输送胶水。
7、优选的,所述旋压装置包括旋压基板,旋压基板与点胶旋压进给基板之间设有直线导轨,旋压基板的后端所述点胶旋压进给基板上安装有缓冲座,缓冲座上垂直旋压基板设有缓冲杆,缓冲杆上设有缓冲弹簧;旋压基板上安装有旋压电机座,旋压电机座上安装有旋压电机,旋压电机的输出轴上安装有主动齿轮,主动齿轮啮合从动齿轮组,从动齿轮组的每个从动齿轮均安装在独立的旋压轴上,旋压轴安装在旋压轴承座上,旋压轴承座安装旋压基板上,在旋压轴的端部安装有旋压头。
8、优选的,在直线轨道滑行座的支座上固定安装有检测装置,用于检测柱钉旋压高度,所述检测装置包括支架,所述支架的上端向柱钉辊套方向延伸,在支架的端部安装有测距感应器。
9、优选的,所述3d相机采集装置包括与下层移动导轨配合的3d相机行走板,3d相机行走板的侧面安装有3d相机采集装置行走电机,3d相机采集装置行走电机的输出端安装有行走齿轮,行走齿轮啮合安装在下层移动导轨内侧的下层传动齿条;所述3d相机行走板上安装有3d相机,3d相机连接显示器。
10、优选的,所述3d相机行走板的上表面安装有3d相机升降进给板,3d相机升降进给板与3d相机行走板安装有直线导轨;3d相机升降进给板安装有3d相机进给行走电机,行走电机的输出端安装有3d相机进给行走齿轮,3d相机进给行走齿轮与啮合设置在3d相机行走板的上表面的3d相机进给齿条;使3d相机采集装置沿垂直柱钉辊套轴线方向运动;所述3d升降基座上安装有3d相机升降机构。
11、优选的,3d相机升降机构包括3d相机升降导向板,安装在3d相机升降导向板下方的贯通轴式丝杠步进电机,电机的输出端连接丝杠,丝杠上端连接3d相机升降板,3d相机升降板上安装3d相机;3d相机升降板与3d相机升降导向板之间设有导向柱。
12、优选的,所述打磨清洗喷吹装置包括安装在下层移动导轨上的打磨清洗喷吹行走板,打磨清洗喷吹行走板的侧面安装行走电机,行走电机的输出端安装行走齿轮,所述行走齿轮啮合安装在下层移动导轨外侧的下层传动齿条;打磨清洗喷吹行走板安装在打磨清洗喷吹基座上,打磨清洗喷吹基座与打磨清洗喷吹行走板之间安装有直线导轨,打磨清洗喷吹基座上安装有打磨清洗喷吹进给电机,打磨清洗喷吹进给电机的输出端安装进给齿轮,进给齿轮啮合进给齿条;所述进给齿条安装在打磨清洗喷吹行走板的上表面;在靠近柱钉辊套侧所述打磨清洗喷吹升降基板上安装有升降导向板,升降导向板的下方安装有贯通轴式丝杠步进电机,步进电机的输出端连接丝杠,丝杠上端连接打磨清洗喷吹升降板,打磨清洗喷吹升降板上安装打磨组件和清洗喷吹组件;打磨清洗喷吹升降板与升降导向板之间设有导向柱。
13、优选的,所述打磨组件包括安装在打磨清洗喷吹升降板上的三个打磨电机,每个打磨电机输出端连接打磨轮。
14、优选的,所述清洗喷吹组件包括安装在打磨清洗喷吹升降板上的气缸,气缸的活塞杆连接打磨清洗喷吹座,所述打磨清洗喷吹座上安装有喷雾基板,所述喷雾基板上安装有六个与清洗剂和高压气源连接的喷雾阀。
15、优选的,所述柱钉上料单元包括设置在柱钉振动筛分机的传送轨道的末端的柱钉挡板,沿着垂直方向安装有柱钉上料移动组件,柱钉上料移送组件包括数个柱钉上料块,数个柱钉上料块呈一字型布局安装在柱钉移动托板上,所述柱钉移动托板安装在直线滑轨的滑块上,柱钉挡板连接气缸活塞杆端部的推板,柱钉挡板下端立柱上安装有柱钉导向块,所述柱钉导向块上设有柱钉导向孔;还设置两个柱钉到位检测传感器,检测柱钉是否倾斜,在柱钉导向块的下表面还设有下料检测传感器,下料检测传感器用于检测是否落料。
16、优选的,柱钉垫上料单元包括设置在柱钉垫振动筛分机柱钉垫的传送轨道的末端的柱钉垫物料拾取装置,沿着垂直方向安装有柱钉垫上料组件,柱钉垫上料组件包括数个柱钉垫上料块,数个柱钉垫上料块呈一字型布局安装在柱钉垫移动板,所述柱钉垫移动板安装在直线滑轨的滑块上,柱钉垫拾取装置包括竖直设置机架,机架上安装有升降机构,升降机构包括有贯通式升降电机,贯通式升降电机的输出轴上安装有磁铁安装套,磁铁安装套内安装有电磁块;所述机架上还安装有柱钉垫承托板,所述柱钉垫成托板与柱钉垫栓送轨道对接,所述柱钉垫成托板连接柱钉垫承托气缸;所述机架上安装有第一红外传感器,用于检测电磁块是否回到原点初始位置;还有两个柱钉垫位置检测传感器,其中位于上部的位置检测传感器用于检测柱钉垫是否到位;位于下部的位置检测传感器用于检测柱钉垫下落。
17、优选的,所述托辊总成用于支撑柱钉辊套,包括与地基连接的底座,所述底座上对称设有托辊装置,托辊装置包括托辊架,所述托辊架上安装有两个托辊,其中一侧的托辊装置的两个托辊分别安装有驱动托辊旋转的私服驱动电机和减速机。
18、优选的,底座上沿垂直柱钉辊套轴线方向设有直线导轨,所述托辊架移动安装在直线导轨上,每个托辊架均通过丝杠连接,每个丝杠独立连接私服电机。
19、本发明具有的优点和技术效果:
20、本发明通过协同机器人,完成柱钉垫和柱钉的自动上料,打磨清洗喷吹装置,用于对柱钉辊套柱钉孔在点胶前进行打磨和清扫;通过点胶装置在柱钉和柱钉垫放置前箱柱钉孔内注入胶液;通过旋压装置将协同机器人抓取的柱钉和柱钉垫压紧在柱钉辊套柱钉孔内;检测装置,用于检测柱钉和柱钉垫位置;采用3d相机和2d视觉定位拾取和投放功能定位精准,本发明在相互配合下,实现了柱钉辊套柱钉粘钉作业,本发明具有自动化程度高、提高柱钉辊套的加工效率,保证粘钉质量。
- 还没有人留言评论。精彩留言会获得点赞!