一种用于胚料定位的机械手指对位调试平台的制作方法
本发明主要涉及模具生产的,具体为一种用于胚料定位的机械手指对位调试平台。
背景技术:
1、线下对中调试平台是一种用于机械加工和装配过程中的人为对中校正的技术。在模具生产和装配过程中,由于工件、机床和夹具等因素的误差,可能导致加工精度不够高,从而影响产品的质量,因此,需要引入对中调试平台来进行人为对中校正,使生产精度达到要求,以保证能把产品胚料精准投入到模具中。
2、但是现有的线下对中调试平台在对新模具进行调试时,通畅是有人工进行调整,手动驱动手指来定位其位置,增加了调试的时间,降低了生产的效益,因此,发明一种用于胚料定位的机械手指对位调试平台,用于解决上述问题。
技术实现思路
1、基于此,本发明的目的是提供一种用于胚料定位的机械手指对位调试平台,以解决上述背景技术中提出的技术问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种用于胚料定位的机械手指对位调试平台,包括平台和产品胚料,所述平台包括架体,所述架体的四个拐角处均设有底板,所述架体的两侧以及中央处分别设有横梁和横杆,所述架体上安装有若干个滚筒,若干个所述滚筒之间间隔空隙,所述产品胚料放置在滚筒上,所述架体内部位于横杆的下方设有用于顶起产品胚料的上移组件,所述上移组件与底板上表面相连接,两个所述横梁与横杆之间均设有多组移动组件,多组所述移动组件的执行端均通过支板连接有手指,若干个所述手指均位于若干个所述滚筒之间的空隙处。
4、本技术方案具体的,两个所述横梁的内壁均设有第一支撑板,所述横杆的上表面竖向设有第二支撑板,所述横杆的高度与两个横梁的高度相同,所述第二支撑板的顶端与第一支撑板的顶端平齐,且所述第二支撑板和两个第一支撑板的顶端均开设有若干个弧形槽,若干个所述弧形槽均与滚筒相匹配。
5、本技术方案具体的,两个所述横梁和横杆的两端均通过角码与架体固定连接,四个所述底板的两侧分别与架体螺丝固定,两个所述第一支撑板的侧面通过螺栓与架体固定连接,所述第二支撑板的底部通过角码与横杆上表面固定连接。
6、本技术方案具体的,所述移动组件包括伺服电机,所述伺服电机的输出端套设有安装座,所述安装座远离伺服电机的一端设有前轴承座,所述前轴承座远离安装座的一侧连接有壳体,所述壳体的另一端连接有后轴承座,且所述壳体的上表面安装有滑轨,所述滑轨上滑动安装有滑块,所述壳体中设有丝杆,所述丝杆上安装有滚珠丝杆螺母,所述壳体的侧壁开设有移动槽,所述移动槽中安装有移动板,所述移动板与滑块的一侧底部相连接。
7、本技术方案具体的,所述丝杆的一端贯穿前轴承座通过联轴器与伺服电机的输出端连接,所述丝杆的另一端与后轴承座转动连接,所述移动板的一侧与滚珠丝杆螺母的外壁焊接连接,所述滑轨通过螺丝与壳体固定连接,所述滑块与移动板螺丝固定连接,所述前轴承座的下表面通过角码与横梁的外壁相连接,所述后轴承座的下表面通过角码与横杆的侧壁相连接。
8、本技术方案具体的,所述滑块的上表面一侧安装有固定板,所述固定板的侧壁连接有竖向设置的支板,所述支板的顶部安装有手指,所述安装座的两端分别与伺服电机和前轴承座螺丝固定,所述壳体的两端分别与前轴承座以及后轴承座固定连接。
9、本技术方案具体的,所述上移组件包括四个液压缸,四个所述液压缸的执行端均连接有升降板,所述升降板的上表面并排设有若干个t型薄板,若干个所述t型薄板的顶端位于滚筒之间的空隙处。
10、本技术方案具体的,四个所述液压缸的底部均通过螺丝固定安装在底板上,所述升降板的下表面四个拐角处均通过螺栓与液压缸执行端固定连接,若干个所述t型薄板底部均与升降板固定连接。
11、本技术方案具体的,若干个所述t型薄板的顶部均与产品胚料的下表面相接触,所述移动组件设置的壳体位于t型薄板之间的空隙处,所述支板和手指均位于t型薄板的一侧。
12、本技术方案具体的,若干个所述手指靠近产品胚料的一面外壁均设有压力传感器。
13、综上所述,本发明主要具有以下有益效果:本申请将产品胚料放置在平台上,通过移动组件驱动手指至产品胚料的边缘,以此来固定其位置并记录参数拷贝至产线上,从而降低了调试的时间,增加生产效益,同时可以适用于不同形状的产品;
14、产品胚料放置在平台上后,通过启动伺服电机带动丝杆旋转,旋转的丝杆带动滚珠丝杆螺母以及其连接的移动板沿壳体进行横向移动,移动的移动板带动滑块在滑轨上进行滑动,滑动的滑块通过固定板和支板带动手指进行移动,使得手指向产品胚料的边缘进行移动直至与其接触后停止运动,进而对产品胚料进行固定位置的同时记录参数拷贝至产线上;
15、最后将产品胚料取下时,上移组件中的液压缸工作推动升降板进行上移,上移的升降板带动t型薄板移动,移动的t型薄板上移将接触的产品胚料从平台上顶起,进而便于将其取下。
16、附图说明
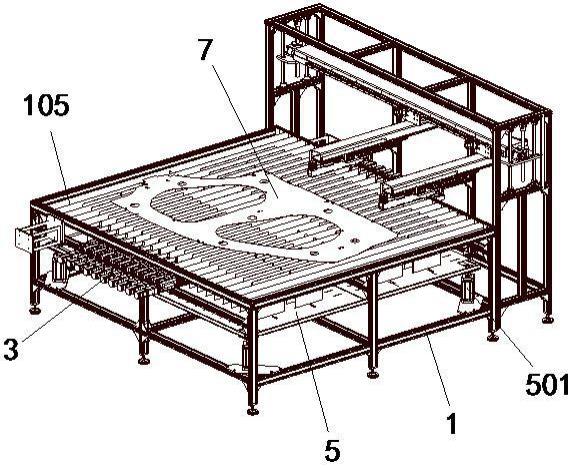
17、图1为本发明的整体示意图;
18、图2为本发明的平台结构示意图;
19、图3为本发明的移动组件示意图;
20、图4为本发明的移动组件侧视图;
21、图5为本发明的移动组件爆炸图;
22、图6为本发明的升降组件示意图;
23、图7为本发明的a处放大图。
技术特征:
1.一种用于胚料定位的机械手指对位调试平台,包括平台(1)和产品胚料(7),其特征在于,所述平台(1)包括架体(101),所述架体(101)的四个拐角处均设有底板(102),所述架体(101)的两侧以及中央处分别设有横梁(106)和横杆(6),所述架体(101)上安装有若干个滚筒(105),若干个所述滚筒(105)之间间隔空隙,所述产品胚料(7)放置在滚筒(105)上,所述架体(101)内部位于横杆(6)的下方设有用于顶起产品胚料(7)的上移组件(5),所述上移组件(5)与底板(102)上表面相连接,两个所述横梁(106)与横杆(6)之间均设有多组移动组件(3),多组所述移动组件(3)的执行端均通过支板(401)连接有手指(2),若干个所述手指(2)均位于若干个所述滚筒(105)之间的空隙处。
2.根据权利要求1所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,两个所述横梁(106)的内壁均设有第一支撑板(103),所述横杆(6)的上表面竖向设有第二支撑板(104),所述横杆(6)的高度与两个横梁(106)的高度相同,所述第二支撑板(104)的顶端与第一支撑板(103)的顶端平齐,且所述第二支撑板(104)和两个第一支撑板(103)的顶端均开设有若干个弧形槽(107),若干个所述弧形槽(107)均与滚筒(105)相匹配。
3.根据权利要求2所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,两个所述横梁(106)和横杆(6)的两端均通过角码与架体(101)固定连接,四个所述底板(102)的两侧分别与架体(101)螺丝固定,两个所述第一支撑板(103)的侧面通过螺栓与架体(101)固定连接,所述第二支撑板(104)的底部通过角码与横杆(6)上表面固定连接。
4.根据权利要求1所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,所述移动组件(3)包括伺服电机(301),所述伺服电机(301)的输出端套设有安装座(302),所述安装座(302)远离伺服电机(301)的一端设有前轴承座(303),所述前轴承座(303)远离安装座(302)的一侧连接有壳体(305),所述壳体(305)的另一端连接有后轴承座(306),且所述壳体(305)的上表面安装有滑轨(307),所述滑轨(307)上滑动安装有滑块(308),所述壳体(305)中设有丝杆(304),所述丝杆(304)上安装有滚珠丝杆螺母(309),所述壳体(305)的侧壁开设有移动槽(3051),所述移动槽(3051)中安装有移动板(310),所述移动板(310)与滑块(308)的一侧底部相连接。
5.根据权利要求4所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,所述丝杆(304)的一端贯穿前轴承座(303)通过联轴器与伺服电机(301)的输出端连接,所述丝杆(304)的另一端与后轴承座(306)转动连接,所述移动板(310)的一侧与滚珠丝杆螺母(309)的外壁焊接连接,所述滑轨(307)通过螺丝与壳体(305)固定连接,所述滑块(308)与移动板(310)螺丝固定连接,所述前轴承座(303)的下表面通过角码与横梁(106)的外壁相连接,所述后轴承座(306)的下表面通过角码与横杆(6)的侧壁相连接。
6.根据权利要求4所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,所述滑块(308)的上表面一侧安装有固定板(4),所述固定板(4)的侧壁连接有竖向设置的支板(401),所述支板(401)的顶部安装有手指(2),所述安装座(302)的两端分别与伺服电机(301)和前轴承座(303)螺丝固定,所述壳体(305)的两端分别与前轴承座(303)以及后轴承座(306)固定连接。
7.根据权利要求1所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,所述上移组件(5)包括四个液压缸(501),四个所述液压缸(501)的执行端均连接有升降板(502),所述升降板(502)的上表面并排设有若干个t型薄板(503),若干个所述t型薄板(503)的顶端位于滚筒(105)之间的空隙处。
8.根据权利要求7所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,四个所述液压缸(501)的底部均通过螺丝固定安装在底板(102)上,所述升降板(502)的下表面四个拐角处均通过螺栓与液压缸(501)执行端固定连接,若干个所述t型薄板(503)底部均与升降板(502)固定连接。
9.根据权利要求7所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,若干个所述t型薄板(503)的顶部均与产品胚料(7)的下表面相接触,所述移动组件(3)设置的壳体(305)位于t型薄板(503)之间的空隙处,所述支板(401)和手指(2)均位于t型薄板(503)的一侧。
10.根据权利要求1所述的一种用于胚料定位的机械手指对位调试平台,其特征在于,若干个所述手指(2)靠近产品胚料(7)的一面外壁均设有压力传感器。
技术总结
本发明公开了一种用于胚料定位的机械手指对位调试平台,涉及模具生产领域,包括平台和产品胚料,平台包括架体,架体的四个拐角处均设有底板,架体的两侧以及中央处分别设有横梁和横杆,架体上安装有若干个滚筒,若干个滚筒之间间隔空隙,产品胚料放置在滚筒上,架体内部位于横杆的下方设有用于顶起产品胚料的上移组件,上移组件与底板上表面相连接,两个横梁与横杆之间均设有多组移动组件,多组移动组件的执行端均通过支板连接有手指,若干个手指均位于若干个滚筒之间的空隙处。本申请可以实现手指的移动并在接触产品胚料后停止,降低了调试的时间,增加生产效益,同时可以适用于不同形状的产品。
技术研发人员:牛华丽,罗模芳,陈金亮,廖华东
受保护的技术使用者:江西豪斯特汽车零部件有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!