一种焊接系统及方法与流程
本发明涉及焊接系统,更具体地说是一种焊接系统及方法。
背景技术:
1、焊接是一种将金属或热可塑性材料通过热力和压力相结合的工艺,以达到永久连接的目的,焊接可以用于连接金属件,修复损坏的金属部件,或者制造新的金属构件;鱼鳞焊是一种金属焊接技术,其原理是利用两片金属板的鱼鳞状结构,通过热力和压力将它们连接在一起;这种焊接方法通常用于连接金属板,特别是在船舶和海洋工程中常见;由于鱼鳞焊被广泛应用在焊接的多个场合,人工鱼鳞焊需要大量的经验和操作,因此需要一种可以模拟人工焊接的方式,完成鱼鳞焊的系统。
技术实现思路
1、本发明的目的是提供一种焊接系统及方法,可以模拟人工焊接的方式,完成鱼鳞焊。
2、本发明的目的通过以下技术方案来实现:
3、一种焊接系统,包括装置支架,装置支架上固定连接有两个限位支架ⅰ,两个限位支架ⅰ均上转动连接有丝杆ⅰ,限位支架ⅰ上固定连接有驱动丝杆ⅰ进行转动的动力机构ⅰ,动力机构ⅰ优选为伺服电机;
4、装置支架上固定连接有限位支架ⅱ,限位支架ⅱ上转动连接有丝杆ⅱ,限位支架ⅱ上固定连接有驱动丝杆ⅱ进行转动的动力机构ⅱ,动力机构ⅱ优选为伺服电机;
5、两个限位支架ⅰ上均滑动连接有滑动支架,每个滑动支架上均转动连接有丝杆ⅲ,滑动支架上固定连接有驱动丝杆ⅲ进行转动的动力机构ⅲ,动力机构ⅲ优选为伺服电机,滑动支架上滑动连接有滑动块ⅰ,滑动块ⅰ通过螺纹连接在丝杆ⅲ上;
6、滑动块ⅰ上转动连接有装夹支架,滑动块ⅰ上固定连接有驱动装夹支架进行转动的动力机构ⅳ,动力机构ⅳ优选为伺服电机,装夹支架上固定连接有多个伸缩机构ⅰ,每个伸缩机构ⅰ的伸缩端上均固定连接有装夹板;
7、限位支架ⅱ上滑动连接有滑动块ⅱ,滑动块ⅱ通过螺纹连接在丝杆ⅱ上,滑动块ⅱ上固定连接有伸缩机构ⅱ,伸缩机构ⅱ的伸缩端上固定连接有升降支架,升降支架上转动连接有转动支架;
8、转动支架上转动连接有摆动支架,转动支架上固定连接有驱动摆动支架进行转动的动力机构ⅵ,动力机构ⅵ优选为伺服电机,摆动支架上固定连接有限位环;
9、限位环上滑动连接有焊接杆,焊接杆的侧边设置有限位槽,焊接杆的一端上固定连接有焊接头,焊接杆的另一端上固定连接有摆动杆;
10、摆动支架上固定连接有伸缩机构ⅲ,伸缩机构ⅲ的伸缩端上转动连接有驱动轮,驱动轮位于限位槽内,驱动轮和焊接杆接触,伸缩机构ⅲ的伸缩端上固定连接有驱动驱动轮进行转动的动力机构ⅶ,动力机构ⅶ优选为伺服电机;
11、升降支架上固定连接有两个伸缩机构ⅳ,每个伸缩机构ⅳ的伸缩端上均固定连接有伸缩机构ⅴ,每个伸缩机构ⅴ的伸缩端上均滑动连接有推动柱,推动柱和伸缩机构ⅴ的伸缩端之间固定连接有压缩弹簧,两个推动柱均能够和摆动杆接触。
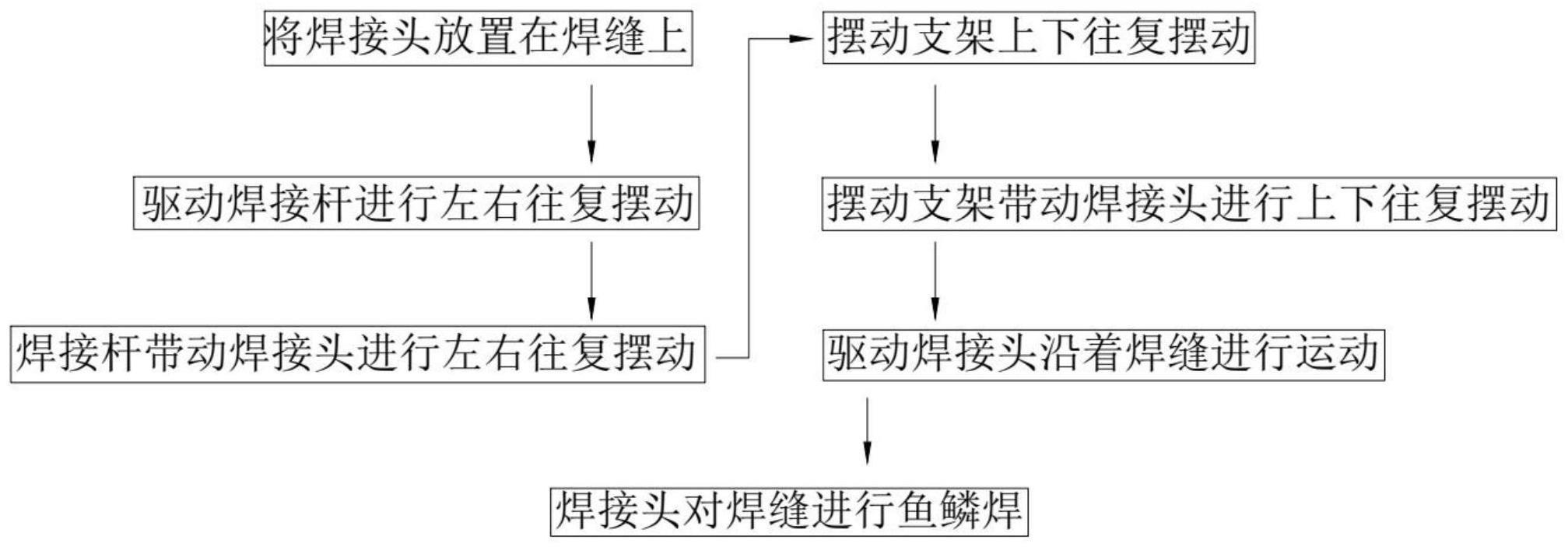
12、一种焊接系方法,该方法包括以下步骤:
13、步骤一:将焊接头放置在焊缝上,驱动焊接杆进行左右往复摆动,焊接杆带动焊接头进行左右往复摆动;
14、步骤二:摆动支架上下往复摆动,摆动支架带动焊接头进行上下往复摆动;
15、步骤三:驱动焊接头沿着焊缝进行运动,焊接头对焊缝进行鱼鳞焊。
技术特征:
1.一种焊接系统,包括转动支架(44),其特征在于:所述转动支架(44)上转动连接有摆动支架(51),摆动支架(51)上固定连接有限位环(52),限位环(52)上滑动连接有焊接杆(61),焊接杆(61)的侧边设置有限位槽(62),焊接杆(61)的一端上固定连接有焊接头(63),焊接杆(61)的另一端上固定连接有摆动杆(64)。
2.根据权利要求1所述的一种焊接系统,其特征在于:所述转动支架(44)转动连接在升降支架(43)上,升降支架(43)固定连接在伸缩机构ⅱ(42)的伸缩端上,伸缩机构ⅱ(42)固定连接在滑动块ⅱ(41)上。
3.根据权利要求2所述的一种焊接系统,其特征在于:所述摆动支架(51)上固定连接有伸缩机构ⅲ(71),伸缩机构ⅲ(71)的伸缩端上转动连接有驱动轮(72),驱动轮(72)位于限位槽(62)内,驱动轮(72)和焊接杆(61)接触。
4.根据权利要求2所述的一种焊接系统,其特征在于:所述升降支架(43)上固定连接有两个伸缩机构ⅳ(81),每个伸缩机构ⅳ(81)的伸缩端上均固定连接有伸缩机构ⅴ(82),每个伸缩机构ⅴ(82)的伸缩端上均滑动连接有推动柱(83),推动柱(83)和伸缩机构ⅴ(82)的伸缩端之间固定连接有压缩弹簧,两个推动柱(83)均能够和摆动杆(64)接触。
5.根据权利要求2所述的一种焊接系统,其特征在于:所述滑动块ⅱ(41)滑动连接在限位支架ⅱ(14)上,限位支架ⅱ(14)固定连接在装置支架(11)上,限位支架ⅱ(14)上转动连接有丝杆ⅱ(15),滑动块ⅱ(41)通过螺纹连接在丝杆ⅱ(15)上。
6.根据权利要求5所述的一种焊接系统,其特征在于:所述装置支架(11)上固定连接有两个限位支架ⅰ(12),两个限位支架ⅰ(12)均上转动连接有丝杆ⅰ(13)。
7.根据权利要求6所述的一种焊接系统,其特征在于:两个限位支架ⅰ(12)上均滑动连接有滑动支架(21),每个滑动支架(21)上均转动连接有丝杆ⅲ(22),滑动支架(21)上滑动连接有滑动块ⅰ(23),滑动块ⅰ(23)通过螺纹连接在丝杆ⅲ(22)上。
8.根据权利要求7所述的一种焊接系统,其特征在于:所述滑动块ⅰ(23)上转动连接有装夹支架(31)。
9.根据权利要求8所述的一种焊接系统,其特征在于:所述装夹支架(31)上固定连接有多个伸缩机构ⅰ(32),每个伸缩机构ⅰ(32)的伸缩端上均固定连接有装夹板(33)。
10.使用权利要求3所示的一种焊接系统进行焊接的方法,其特征在于:该方法包括以下步骤:
技术总结
本发明涉及焊接系统,更具体的说是一种焊接系统及方法,该方法包括以下步骤:步骤一:将焊接头放置在焊缝上,驱动焊接杆进行左右往复摆动,焊接杆带动焊接头进行左右往复摆动;步骤二:摆动支架上下往复摆动,摆动支架带动焊接头进行上下往复摆动;步骤三:驱动焊接头沿着焊缝进行运动,焊接头对焊缝进行鱼鳞焊;转动支架上转动连接有摆动支架,转动支架上固定连接有驱动摆动支架进行转动的动力机构Ⅵ,动力机构Ⅵ优选为伺服电机,摆动支架上固定连接有限位环;限位环上滑动连接有焊接杆,焊接杆的侧边设置有限位槽,焊接杆的一端上固定连接有焊接头,焊接杆的另一端上固定连接有摆动杆;可以模拟人工焊接的方式,完成鱼鳞焊。
技术研发人员:冯树娣
受保护的技术使用者:冯树娣
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!