一种舱段自动分解装置及方法与流程
本发明涉及舱段分解,具体涉及一种舱段自动分解装置及方法。
背景技术:
1、舱段分解是将组合在一体的产品,分解为两个或多个舱段,目前在舱段分解过程中,大多采用手动分解方式进行分解。
2、手动分解是在分离的产品段下面放置手动架车,通过人工找正和调节架车的自由度,以及指挥人员前后左右来回跑动,目视产品和托架之间的接触效果,来确定分解的程度,反复多次后才能完成舱段的分解。整个分解过程中,由于人工目视误差和人工经验的限制,分解精度往往不高,目测舱段和托架已经完全接触,可是拆卸螺钉时,却又很大的冲击力,这种手动分解方式必然会影响到对接面及螺钉的质量,同时手动分解的危险系数大、分解精度无法保证,不能满足舱段分解的高精度、高自动化的需求。而且,反复分解,导致人员的体能消耗较大,且工作效率低、强度大、费时费力等问题。
3、近几年,随着视觉定位技术和调姿技术的发展,为实现大型舱段的自动对接分解技术奠定了基础,因此寻求一种具备全向移动、视觉测量、调姿和力学测量等功能的舱段自动分解设备,使其可以完成舱段自动分解,提高分解精度。
技术实现思路
1、本发明的目的是为解决现有舱段手动分解过程中由于人工目视误差和人工经验的限制,无法保证分解精度,且人工分解的危险系数较大、工作效率低、强度大、耗时耗力等问题,而提出一种舱段自动分解装置及方法。
2、为实现上述目的,本发明提出的技术解决方案为:
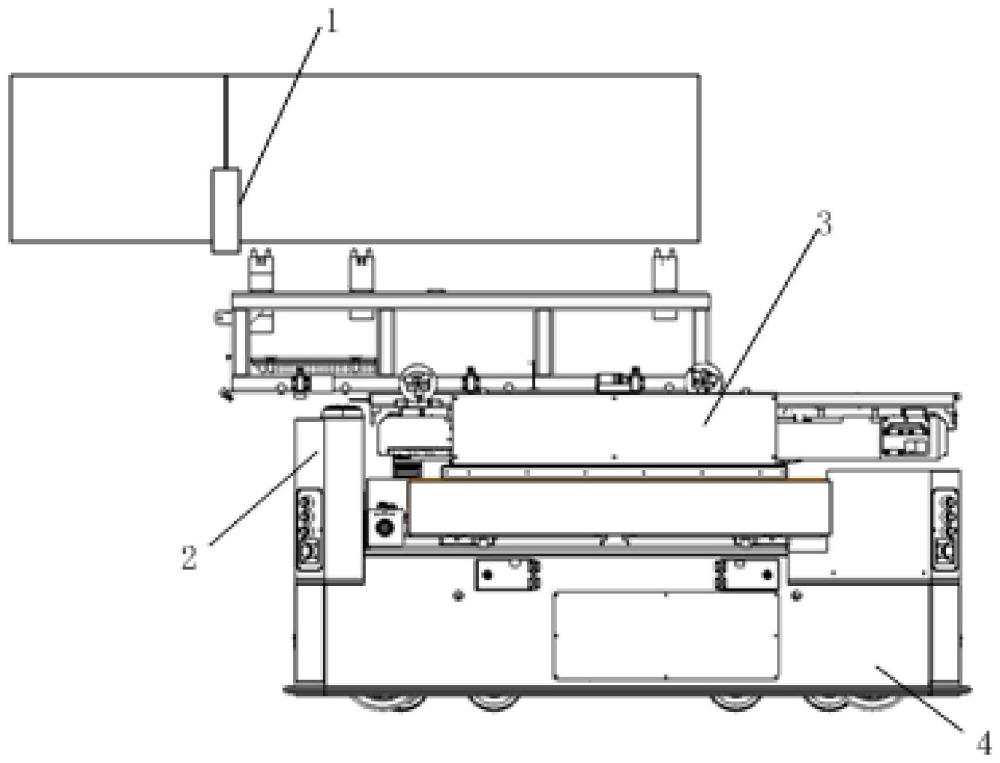
3、一种舱段自动分解装置,其特殊之处在于:包括标靶定位单元、视觉测量单元、多角度调姿单元、压力测量单元和移动底座;
4、所述标靶定位单元包括两个标靶,两个标靶分别设置在待分解舱段的两侧且两个标靶之间形成的中心线与待分解舱段的分解线重合;
5、所述视觉测量单元包括图像获取系统和数据处理系统,所述图像获取系统用于对标靶的位置信息进行捕获,数据处理系统用于将图像获取系统捕获的标靶位置信息进行处理,视觉测量单元设置在所述移动底座的一侧;
6、所述多角度调姿单元包括由下向上依次连接的横向调节装置、升降调节装置、俯仰调节装置、偏航调节装置、航向调节装置和滚转调节装置;所述横向调节装置、升降调节装置和航向调节装置分别用于多角度调姿单元沿空间坐标系的x轴方向、z轴方向和y轴方向的位置调节;所述俯仰调节装置、偏航调节装置和滚转调节装置分别用于多角度调姿单元绕空间坐标系x轴方向、z轴方向和y轴方向的角度调节;
7、所述多角度调姿单元固定在移动底座上;
8、所述压力测量单元包括多个设置在航向调节装置上的测力传感器,用于测量舱段与多角度调姿单元之间的压力。
9、进一步地,所述横向调节装置包括第一底板和设置在第一底板上表面的两条相互平行的第一导轨滑块,第一底板的一侧设置有第一滚珠丝杠和第一电机,第一电机带动第一滚珠丝杠转动,进而驱动多角度调姿单元沿空间坐标系的x轴方向进行左右移动,第一底板的下表面与移动底座固定连接;
10、所述升降调节装置包括第二底板和设置在第二底板上表面的两个相互对称的斜面升降基座,第二底板的下表面与第一导轨滑块配合连接,两个斜面升降基座上设置有两条相互平行的第二导轨滑块,与第二导轨滑块平行的第二底板的两侧边均设置有依次连接的传动齿轮、第二电机、第二滚珠丝杠和换向齿轮,所述两个斜面升降基座与第二滚珠丝杠合连接,第二电机带动第二滚珠丝杠转动,进而驱动多角度调姿单元沿空间坐标系的z轴方向进行升降移动;
11、所述俯仰调节装置包括俯仰基座和俯仰传动机构,所述俯仰基座固定在两条相互平行的第二导轨滑块上,俯仰基座上的四个边角处均设置有俯仰滚轮滑动轨道;所述俯仰传动机构包括俯仰传动支架和设置在俯仰传动支架内侧的第三电机和第三滚珠丝杠,俯仰传动支架的外侧设置有与四个俯仰滚轮滑动轨道相配合的俯仰滚轮,所述第三电机带动第三滚珠丝杠驱动多角度调姿单元绕空间坐标系的x轴方向进行俯仰运动;
12、所述偏航调节装置包括第三底板、第四电机、齿轮箱、以及涡轮蜗杆回转支承;所述第四电机、齿轮箱以及涡轮蜗杆回转支承的内圈设置在俯仰传动支架内;涡轮蜗杆回转支承的外圈设置在第三底板的上表面,蜗杆回转支承的内圈和涡轮蜗杆回转支承的外圈相扣合;所述第四电机带动齿轮箱和涡轮蜗杆回转支承的内外圈转动驱动多角度调姿单元绕空间坐标系的z轴方向进行回转运动;
13、所述航向调节装置包括航向基座和设置在航向基座上的第五电机、第四滚珠丝杠和多个滚转滚轮,所述航向基座固定在第三底板的下表面上,航向基座上还设置有两条相互平行的第三导轨滑块,所述两个滚转滚轮互相对应的设置在第三导轨滑块上形成一组滚转滚轮,第五电机带动第四滚珠丝杠驱动多角度调姿单元沿空间坐标系的y轴方向进行运动;
14、所述滚转调节装置包括与航向基座相配合连接的滚转基座和设置在滚转基座上的弧形滚道和滚转拨叉,所述航向基座上还设置有第六电机和第五滚珠丝杠;所述多组滚转滚轮与弧形滚道相配合,并沿弧形滚道滚转;滚转拨叉和第五滚珠丝杠相配合连接,第六电机带动滚转拨叉移动进而驱动多角度调姿单元绕空间坐标系的y轴方向进行滚转运动。
15、进一步地,所述航向基座上设置有四组滚转滚轮,四组滚转滚轮分别为航向基座上由远离视觉测量单元的一端向靠近视觉测量单元的一端依次排布的第一组滚转滚轮、第二组滚转滚轮、第三组滚转滚轮和第四组滚转滚轮,所述第一组滚转滚轮和第三组的滚转滚轮上均设置有测力传感器。
16、进一步地,所述第一组滚转滚轮和第三组滚转滚轮的设置位置关系满足下式:
17、f11=f12;f31=f32;
18、g=f11+f12+f31+f32;
19、(f11+f12)×l1=(f31+f32)×l2
20、其中:f11为第一组的第一个滚转滚轮的支撑力,f12为第一组的第二个滚转滚轮的支撑力,f31为第三组的第一个滚转滚轮的支撑力,f32为第三组的第二个滚转滚轮的支撑力,g为待分解舱段的重量,l1为待分解舱段重心垂线到第一组滚转滚轮中心的距离,l2为待分解舱段重心垂线到第三组滚转滚轮中心的距离。
21、进一步地,所述第一电机和第一滚珠丝杠、第二电机和第二滚珠丝杠、第三电机和第三滚珠丝杠、第五电机和第四滚珠丝杠、第六电机和第五滚珠丝杠之间均设置有减速机。
22、进一步地,所述第一滚珠丝杠、第二滚珠丝杠、第三滚珠丝杠、第四滚珠丝杠和第五滚珠丝杠上设置有手轮,用于手动转动手轮驱动第一滚珠丝杠、第二滚珠丝杠、第三滚珠丝杠、第四滚珠丝杠和第五滚珠丝杠运动;
23、所述第一滚珠丝杠、第二滚珠丝杠、第三滚珠丝杠和第四滚珠丝杠均为梯形滚珠丝杠。
24、一种舱段自动分解方法,采用一种舱段自动分解装置,其特殊之处在于,包括以下步骤:
25、步骤一、将标靶固定在待分解舱段的分解面两侧;
26、步骤二、通过移动底座将视觉测量单元和多角度调姿单元移动至待分解舱段的分解区内;
27、步骤三、通过图像获取系统捕获待分解舱段分解面上的标靶位置,然后经过数据处理系统获得待分解舱段分解面的具体位置数据;
28、步骤四、多角度调姿单元根据步骤三中待分解舱段分解面的具体位置数据对待分解舱段进行接触托举,通过调节多角度调姿单元,使得其与待分解舱段完全贴合;
29、步骤五、通过设置在航向调节装置上的多个测力传感器判断多角度调姿单元与待分解舱段是否完全贴合;
30、若多个测力传感器达到设定值时,则多角度调姿单元与待分解舱段完全贴合,进行下一个步骤;
31、若多个测力传感器未达到设定值时,则多角度调姿单元与待分解舱段未完全贴合,返回步骤四;
32、步骤六、当步骤五中多角度调姿单元与待分解舱段完全贴合时,拆除待分解舱段分解面的连接螺钉,移动底座带动多角度调姿单元托举分解后的舱段远离分解区,完成舱段的自动分解。
33、进一步地,通过多角度调姿单元的横向调节装置、升降调节装置和航向调节装置分别对其沿空间坐标系的x轴方向、z轴方向和y轴方向进行位置调节;
34、通过多角度调姿单元的俯仰调节装置、偏航调节装置和滚转调节装置分别对其绕空间坐标系的x轴方向、z轴方向和y轴方向进行角度调节,使其与待分离舱段完全贴合。
35、本发明的有益效果:
36、【1】本发明舱段自动分解装置通过标靶对待分解舱段进行定位,然后通过视觉测量单元获取标靶位置信息进而确定出待分解舱段的具体位置数据,在通过多角度调姿单元进行调整,使其与待分解舱段完全贴合,最后通过测力传感器判断二者之间的贴合程度,完成舱段的自动分解,该装置满足舱段分解的高精度、高自动化的需求,其不仅缩短了舱段分解的时间,提高了工作效率,同时还保证了舱段的分解精度和安全。
37、【2】本发明通过多角度调姿单元对六个自由度进行调整,使得多角度调姿单元与舱段进行贴合托举,提高了待分解舱段分解面的分解精度,有效缩短了分解时间,提高了工作效率。
38、【3】本发明将多个测力传感器设置在航向基座的滚转滚轮上,通过力学测量实时获取待分解舱段的分解程度,通过多角度调姿单元进行及时调整,大大缩短了待分解舱段的贴合托举时间,提高了工作效率和分解精度。
39、【4】本发明通过在各个滚珠丝杠上设置手轮,可以避免各个电机在发生故障时,对多角度调姿单元和舱段的影响;通过手动控制手轮驱动各个滚珠丝杠旋转应对电机故障等紧急情况,进一步的保证了待分解舱段的稳定和安全。
40、【5】本发明采用多个滚珠丝杠传递动力不仅可以实现各个电机在发生故障时的自锁,还能保证待分解舱段和人员的安全。
- 还没有人留言评论。精彩留言会获得点赞!