一种基于符号表示的系泊链焊接过程故障诊断方法与流程
本发明属于焊接领域,由其涉及一种基于符号表示的系泊链焊接过程故障诊断方法。
背景技术:
1、系泊链是一种将海洋结构件固定在其作业位置的设备,也是海上系泊链定位系泊系统的关键组成部分。随着科技向着更深更远的海洋进行探索,作为海洋装备之一的系泊链,其生产质量安全性能要求也越来越高。由于在系泊链的加工过程需要经过切割弯环、闪光焊接、焊口去刺和热处理等系列工序,而闪光焊接阶段复杂的工艺与较差的工作环境,导致焊接阶段最容易出现系泊链质量缺陷问题。
2、目前系泊链质量检测主要的方法为无损探伤、拉力试验和破断试验。但是这些系泊链焊后质量检测不仅效率低而且成本高,所以随着研究人员对焊接控制系统的研究可以通过焊接过程中的工艺参数,并借助相关研究算法对焊接过程是否异常进行分析判断。对相关的专利及文献进行查阅后发现,现有公告号cn102867025b的专利公开了一种基于特征点符号聚集近似的时间序列异常挖掘方法,该专利中所述方法通过提取特征点来对时间序列进行符号聚集近似表征,并在此基础上对符号串进行距离度量得出异常数据。缺点在于,该专利对时间序列采取了等概率空间划分,没有考虑到等概率划分可能将异常阶段分割,从而导致异常情况被忽视。
3、专利公告号cn109242023的专利公开了“一种基于dtw和mds的锚链闪光焊接质量在线评估方法”,该发明专利基于dtw和mds实现了数据的可视化,通过狄利克雷过程混合模型实现锚链闪光焊接的在线质量评估。缺点在于,该发明没有考虑到在实际生产过程中,合格样本与不合格样本的数量的比例相差较大,是一种典型的数据不平衡现象。此外,在多变量时序异常检测过程中,某些异常在每个维度看起来都正常,但在维度组合时有可能就会出现异常。
技术实现思路
1、为克服现有技术的上述不足,本发明提出一种基于符号表示的系泊链焊接过程故障诊断方法,其包括如下步骤:
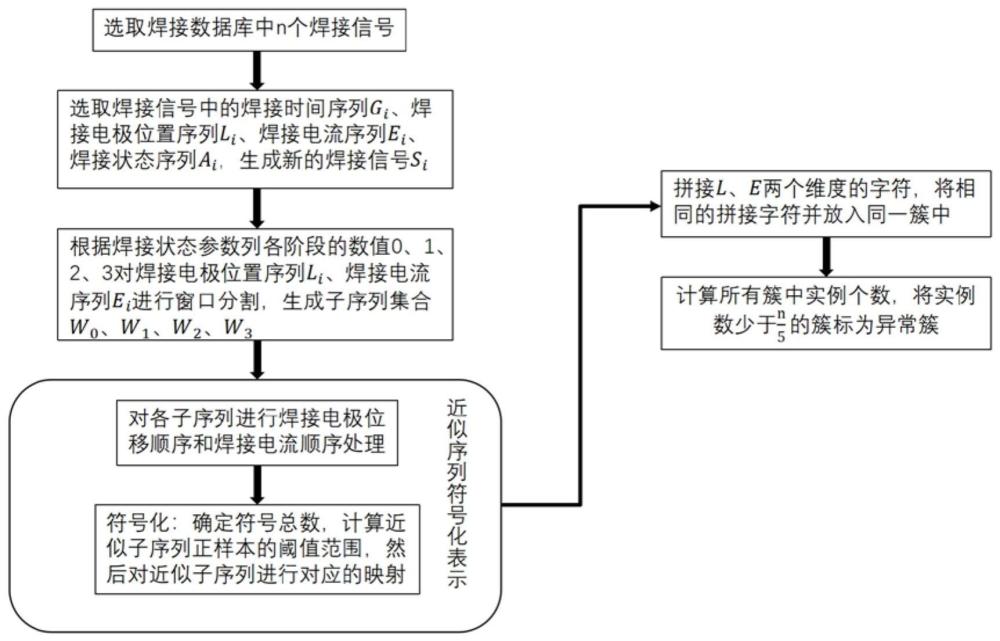
2、s1.取n个原始焊接信号,并将这些信号的焊接时间序列、焊接电极位置序列、焊接电流序列、焊接状态序列分别提取,生成新焊接信号si,该过程具体包括如下步骤:
3、s11.选取n个采集到的完整环焊接信号,其中每个完整焊接信号包括:焊接时间序列、焊接电极位置序列、焊接电流序列、焊接电压序列、顶锻压力信号序列、焊接状态序列,其中对于第i个焊接信号si,{i|0≤i≤n,i∈z},焊接时间序列gi=[g(i)0...g(i)j g(i)(j+1)…g(i)512],焊接电极位置序列li=[l(i)0...l(i)j l(i)(j+1)…l(i)512],焊接电流序列ei=[e(i)0...e(i)j e(i)(j+1)…e(i)512],焊接状态序列ai=[a(i)0...a(i)j a(i)(j+1)…a(i)512],记si=[gili ei ai]t;其中,一个序列中保持阶段的数值点无意义,故统一截取512个数值点,若出现不够的情况则补零;
4、s12.将第j个数值点的焊接状态记为aj,{aj|0≤aj≤3,aj∈n},其中,焊接状态数值化的取值分别设为:预热阶段为0、闪光阶段为1、顶锻阶段为2、保持阶段为3;
5、s2.对步骤s1获得的n个新焊接信号si按s12中的四个焊接阶段进行分割,结果记为分割窗口w*=[w0 w1 w2 w3],初始化窗口w0=[0 0],w1=[0 0],w2=[0 0],w3=[0 0];该过程具体包括如下步骤:
6、s21.初始化参数,令i=0,其中{i|0≤i≤n,i∈z};
7、s22.令i:=i+1;
8、s23.采样的每个新焊接信号都包含按时间顺序进行的四个焊接阶段,且每个信号都从预热阶段即状态信号为0开始,下面对第i个焊接信号si进行l、e维度子序列分割,焊接状态序列应为a=[0...0 1…1 2…2 3…3],记阶段分割点所在列的数值为splitpoint=[m0,m1,m2],具体步骤如下:
9、s231.初始化参数,初始化列参数k=0,此时焊接状态为a(i)k,其中{k|0≤k≤512,k∈z};
10、s232.令k:=k+1;
11、s233.若a(i)k=a(i)(k-1),则返回步骤s232;
12、s234.当a(i)k≠a(i)(k-1)时,执行以下步骤:
13、s2341.若a(i)(k-1)=0且a(i)k=1,令m0=k,焊接信号si由此分割得到0阶段的子序列,记得到的0阶段的l维度子序列为e维度子序列为
14、s2342.若a(i)(k-1)=1且a(i)k=2,令m1=k,由此分割得到1阶段的子序列,起点列参数为m0,终点列参数为m1-1,记得到的1阶段的l维度子序列为e维度子序列为
15、s2343.若a(i)(k-1)=2且a(i)k=3,令m2=k,由此分割得到2、3阶段的子序列,2、3阶段子序列起点列参数分别为m1、m2,终点列参数为m2-1、512,记得到的2阶段的l维度子序列为e维度子序列为3阶段的l维度子序列为e维度子序列为
16、s24.将步骤s234中得到的子序列分别录入对应窗口w0=[l(i)w0 e(i)w0],w1=[l(i)w1 e(i)w1],w2=[l(i)w2 e(i)w2],w3=[l(i)w3 e(i)w3];
17、s25.对其余新焊接信号重复上述步骤s21-s24,直至对n个新焊接信号全部完成分割,得到焊接信号状态值为0的子序列的集合,记为焊接信号状态值为1的子序列的集合,记为焊接信号状态值为2的子序列的集合,记为焊接信号状态值为3的子序列的集合,记为输出结果记为w*=[w0 w1 w2 w3];
18、s3.将焊接信号状态值为0的子序列的集合w0进行焊接电极位置序列顺序和焊接电流序列顺序处理,该过程具体包括如下步骤:
19、s31.初始化参数,令i=0,其中{i|0≤i≤n,i∈z};
20、s32.令i:=i+1;
21、s33.焊接电极位置序列顺序处理:将中各数值点去除其小数,并标记为l(i′)k,即该过程具体包括以下步骤:
22、s331.初始化列参数k=0,其中{k|0≤k≤(m0-1),k∈z};
23、s332.计算差值符号p(i′)k=l(i′)k-l(i′)(k+1),并将p(i′)k录入集合pw0;
24、s333.令k:=k+1;
25、s334.若p(i′)(k+1)=p(i′)k,则返回步骤s332,直至k>(m0-1);
26、s335.当p(i′)(k+1)≠p(i′)k时,将特征点l(i′)k按顺序录入特征集合kpl0,同时将其索引列k录入集合k0,再返回步骤s332,直至k>(m0-1);
27、s336.以集合kpl0中第一个特征点l(i′)k为基准,第一个阈值范围向上取μ1为上限,向下取μ2为下限,同时为第二个阈值范围的上限;以上一阈值范围的下限(下一阈值范围的上限)依次向下μ3为下一阈值范围的下限,用符号abcdef……分别表示第一个阈值范围、第二个阈值范围、第三个阈值范围……;
28、s337.将特征集合kpl0里的所有特征点l(i′)k向不同阈值范围进行符号映射,得到相应符号;
29、s34.焊接电流序列顺序处理:将中各数值点去除其小数,并标记为e(i′)k,即
30、s341.根据s335集合k0中的索引列k提取出序列e(i′)w0对应特征点e(i′)k录入集合kpe0;
31、s342.以焊接电流的门限电流为基准,向上分别取其σ1倍、σ2倍为第一阈值范围和第二阈值范围的上限,向下取其σ3倍、σ4倍为第三和第四阈值范围的上限,同时上一阈值范围的下限的为下一阈值范围的上限;用符号abcdef……分别表示个第一个阈值范围、第二个阈值范围、第三个阈值范围……;
32、s343.将特征集合kpe0里的所有特征点e(i′)k向不同阈值范围进行符号映射,得到相应符号;
33、s35.焊接电极位置序列顺序处理后的字符与焊接电流序列顺序处理后的字符拼接,并将拼接结果标记为x(i)β存入集合kp(i)le0=[x(i)0...x(i)n],将对应索引列k标记为y(i)β存入集合k(i)le0=[y(i)0...y(i)n],其中{n|0≤n≤(m0-1),n∈z};
34、s36.重复步骤s32-s35直至对中的子序列处理完成;
35、s37.建立一个簇cp;
36、s38.初始化参数,令p=0;
37、s39.将集合kp(i)le0=[x(i)0...x(i)n]中x(i)0存入c0;该过程还包括如下步骤:
38、s391.初始化参数β,令β=0;
39、s392.令β:=β+1,将集合kp(i)le0中的x(i)β遍历现有簇cp,与其储存的符号进行对比;
40、s393.若x(i)β与现有簇cp中储存的符号相同则存入,返回步骤s392;
41、s394.当x(i)β与现有簇cp中储存的符号不相同时,令p:=p+1,创建新的簇cp存入,再返回步骤s392;
42、s3a.计算所有簇中实例个数,将实例数少于的簇标为异常簇cr,其中{r|0≤r≤(m0-1),r∈z};
43、s3b.异常簇cr中的x(i)β即为预热阶段中的异常焊接信号,根据异常簇cr中x(i)β的β值提取出集合k(i)le0中对应的异常索引列y(i)β,即可实现预热阶段的异常点定位;
44、s4.将焊接信号状态值为1的子序列的集合w1进行焊接电极位置序列顺序和焊接电流序列顺序处理,具体步骤如下:
45、s41.初始化参数,令i=0,其中{i|0≤i≤n,i∈z};
46、s42.令i:=i+1;
47、s43.根据各个阶段分割点所在列的数值splitpoint=[m0,m1,m2],从预热阶段结束的分割点m0向后抛弃10个时间点;
48、s44.焊接电极位置序列顺序处理:将中各数值点去除其小数,并标记为l(i′)k,即该过程具体包括如下步骤:
49、s441.初始化列参数k=0,其中{k|0≤k≤(m1-1),k∈z};
50、s442.计算差值符号p(i′)k=l(i′)k-l(i′)(k+1),将p(i′)k录入集合pw1;
51、s443.令k:=k+1;
52、s444.若p(i′)(k+1)=p(i′)k,则返回步骤s442,直至k>(m1-1);
53、s445.当p(i′)(k+1)≠p(i′)k时,将特征点l(i′)k按顺序录入特征集合kpl1,同时将其索引列k录入集合k1,再返回步骤s442,直至k>(m1-1);
54、s446.将特征集合kpl1里的所有特征点l(i′)k向步骤s336划分的不同阈值范围进行符号映射,得到相应符号;
55、s45.焊接电流序列顺序处理:将中各数值点去除其小数,并标记为e(i′)k,即该过程具体包括如下步骤:
56、s451.根据步骤s445的集合k1中的索引列k提取出序列e(i′)w1对应特征点e(i′)k录入集合kpe1;
57、s452.将特征集合kpe1里的所有特征点e(i′)k向步骤s342划分的不同阈值范围进行符号映射,得到相应符号;
58、s46.将焊接电极位置序列顺序处理后的字符与焊接电流序列顺序处理后的字符拼接,并将拼接结果标记为x(i)β存入集合kp(i)le1=[x(i)0...x(i)n],将对应索引列k标记为y(i)β存入集合k(i)le1=[y(i)0...y(i)n],其中{n|0≤n≤(m1-1),n∈z};
59、s47.重复步骤s42-s46直至对中的子序列处理完成;
60、s48.建立一个簇cp;
61、s49.初始化参数;令p=0;
62、s4a.将集合kp(i)le1=[x(i)0...x(i)n]中x(i)0存入c0;该过程具体包括如下步骤:
63、s4a1.初始化参数β,令β=0;
64、s4a2.令β:=β+1,将集合kp(i)le1中的x(i)β遍历现有簇cp,与其储存的符号进行对比;
65、s4a3.若x(i)β与现有簇cp中储存的符号相同则存入,返回步骤s4a2;
66、s4a4.当x(i)β与现有簇cp中储存的符号不相同时,令p:=p+1,创建新的簇cp存入,再返回步骤s4a2;
67、s4b.计算所有簇中实例个数,将实例数少于的簇标为异常簇cr,其中{r|0≤r≤(m0-1),r∈z};
68、s4c.异常簇cr中的x(i)β即为闪光阶段中的异常焊接信号,根据异常簇cr中x(i)β的β值提取出集合k(i)le1中对应的异常索引列y(i)β,即可实现闪光阶段的异常点定位;
69、s5.将焊接信号状态值为2的子序列的集合w2进行焊接电极位置序列顺序和焊接电流序列顺序处理,具体步骤如下:
70、s51.初始化参数,令i=0,其中{i|0≤i≤n,i∈z};
71、s52.令i:=i+1;
72、s53.焊接电极位置序列顺序处理:将中各数值点去除其小数,并标记为l(i′)k,即该过程具体包括如下步骤:
73、s531.初始化列参数k=0,其中{k|0≤k≤(m2-1),k∈z};
74、s532.计算差值符号p(i′)k=l(i′)k-l(i′)(k+1),将p(i′)k录入集合pw2;
75、s533.令k:=k+1;
76、s534.若p(i′)(k+1)=p(i′)k,则返回步骤s532,直至k>(m2-1);
77、s535.当p(i′)(k+1)≠p(i′)k时,将特征点l(i′)k按顺序录入特征集合kpl2,同时将其索引列k录入集合k2,再返回步骤s532,直至k>(m2-1);
78、s536.将特征集合kpl2里的所有特征点l(i′)k向步骤s336划分的不同阈值范围进行符号映射,得到相应符号;
79、s54.焊接电流序列顺序处理:将中各数值点去除其小数,并标记为e(i′)k,即
80、s541.根据s535集合k2中的索引列k提取出序列e(i′)w2对应特征点e(i′)k录入集合kpe2;
81、s542.将特征集合kpe2里的所有特征点e(i′)k向步骤s342划分的不同阈值范围进行符号映射,得到相应符号;
82、s55.焊接电极位置序列顺序处理后的字符与焊接电流序列顺序处理后的字符拼接,并将拼接结果标记为x(i)β存入集合kp(i)le2=[x(i)0...x(i)n],将对应索引列k标记为y(i)β存入集合k(i)le2=[y(i)0...y(i)n],其中{n|0≤n≤(m2-1),n∈z};
83、s56.重复步骤s52-s55直至对中的子序列处理完成;
84、s57.建立一个簇cp;
85、s58.初始化参数;令p=0;
86、s59.将集合kp(i)le2=[x(i)0...x(i)n]中x(i)0存入c0;该过程具体包括如下步骤:
87、s591.初始化参数β,令β=0;
88、s592.令β:=β+1,依次访问集合kp(i)le2中的x(i)β遍历现有簇cp,与其储存的符号进行对比;
89、s593.若x(i)β与现有簇cp中储存的符号相同则存入,返回步骤s592;
90、s594.当x(i)β与现有簇cp中储存的符号不相同时,令p:=p+1,创建新的簇cp存入,再返回步骤s592;
91、s5a.计算所有簇中实例个数,将实例数少于的簇标为异常簇cr,其中{r|0≤r≤(m0-1),r∈z};
92、s5b.异常簇cr中的x(i)β即为顶锻阶段中的异常焊接信号,根据异常簇cr中x(i)β的β值提取出集合k(i)le2中对应的异常索引列y(i)β,即可实现异常点定位。
93、本发明相较于现有技术具有以下优势:
94、1、动态符号化时间序列,本发明中根据系泊锚链闪光焊接信号波动性大,复杂多变的特点,以第一阶段的起始特征点为基准,动态划分符号映射的阈值范围,将复杂多变的焊接信号映射成简易统一的字符串序列,大大增加了异常检测效率和精确度。
95、2、分阶段异常检测,根据系泊链焊接数据特有的焊接阶段信号进行时间序列的窗口分割并对每个子序列提取特征点,相较于其他符号化时间序列专利中对时间序列进行等概率空间划分且用该空间中数值点的平均值代表该空间的特征,本发明在对原时间序列降维的同时又能更准确的表示原时间序列。
96、3、异常点定位,本发明中根据各阶段提取出的特征点,同时也极有可能是异常的点进行符号化映射,通过判断特征点的异常与否即可定位到异常所在的阶段和位置点,且通过符号所对应的阈值后期方便人工判断出相应的异常原因。
97、4、本发明中结合焊接电极位移信号与焊接电流信号两个维度信息来对系泊锚链焊接信号异常定位,弱化了因一个维度焊接信号的复杂性带来的局部性波动,提高了异常检测结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!