上下料机器人的制作方法
本发明涉及机器人,具体而言,涉及一种上下料机器人。
背景技术:
1、cnc加工虽然其加工效率高,加工精度改善,但是将工件安装于机床的装卡操作仍然主要由人工完成。而cnc加工车间,由于其噪音大、劳动强度高、劳动条件差等,对工人的身心伤害较大,所以不适宜工人劳动。
技术实现思路
1、本发明的第一个目的在于提供一种上下料机器人,以解决现有cnc加工时工人作业条件差的技术问题。
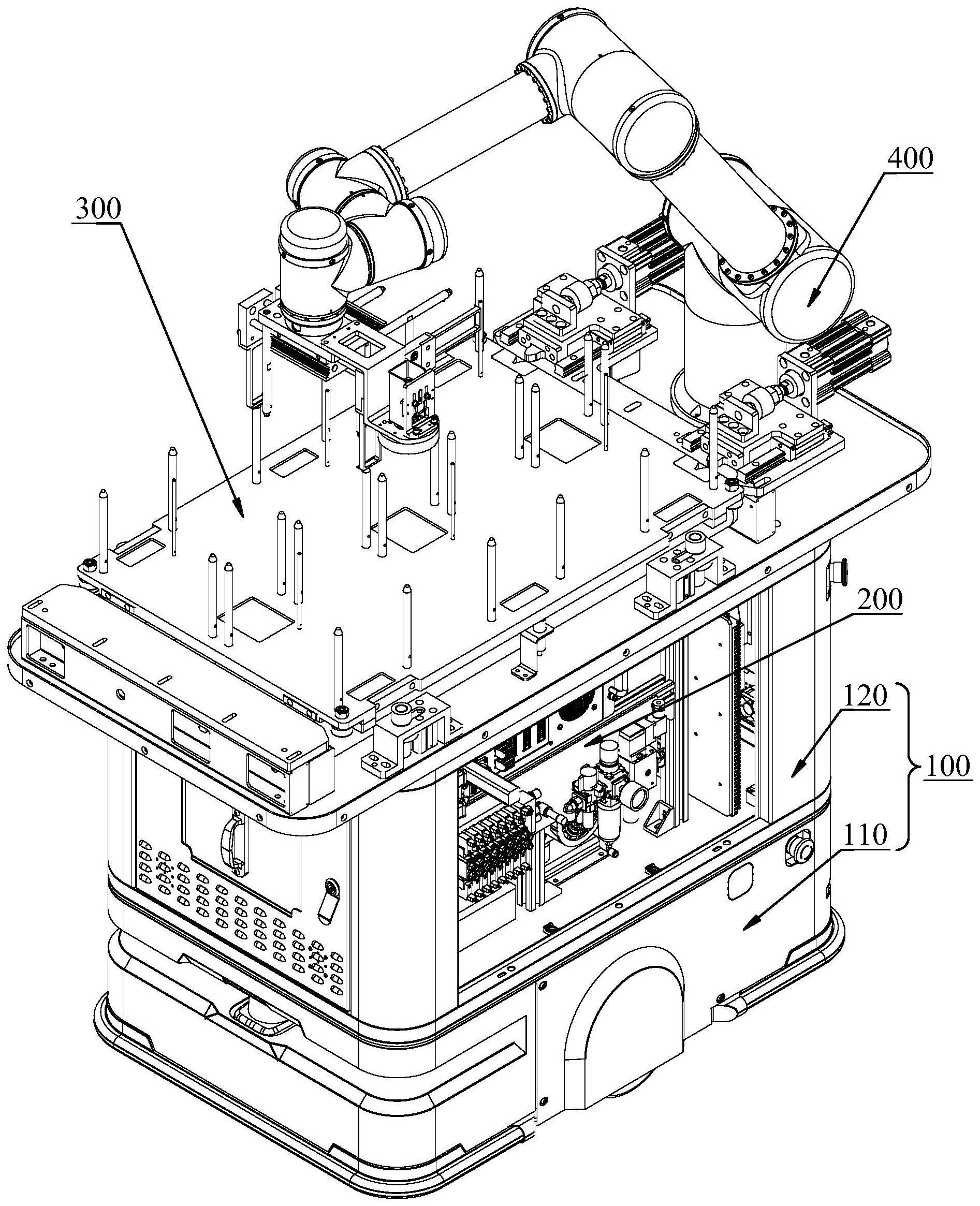
2、本发明提供的上下料机器人,包括:位移模块、动力控制模块、储料模块和上下料模块;
3、所述动力控制模块安装于所述位移模块,所述动力控制模块用于为所述位移模块、所述储料模块和所述上下料模块提供动力和控制信号;
4、所述储料模块安装于位移模块,所述储料模块用于容置工件;
5、所述上下料模块安装于所述位移模块,所述上下料模块用于从所述储料模块取所述工件并将所述工件传送至加工位并用于从加工位取所述工件。
6、本发明上下料机器人带来的有益效果是:
7、通过设置位移模块,可以实现上下料机器人在车间中的水平移动,而利用动力控制模块,以提供动力并控制上下料模块从储料模块中取工件并传送至机床的加工位,以及从加工位取下工件并放置于储料模块中,可以实现无需人工向数控机床上下料,减少了操作人员在cnc加工车间的工作时间,改善了工人的作业条件。
8、优选的技术方案中,所述储料模块包括托盘组件和水平输送机构;所述托盘组件包括托盘本体,所述托盘本体用于盛放工件,所述水平输送机构用于沿第一方向和第一方向反方向传递所述托盘组件。
9、优选的技术方案中,所述储料模块包括挡位组件,所述挡位组件设置在所述水平输送机构的沿第一方向延伸的一侧和所述水平输送机构的沿所述第一方向的反向延伸的一侧。
10、优选的技术方案中,所述挡位组件包括挡位支架和挡位气缸,所述挡位气缸安装于所述挡位支架,所述挡位气缸的动力输出端安装有挡位传动杆,所述挡位传动杆连接有挡位杆,所述挡位杆滑动设置于所述挡位支架上。
11、优选的技术方案中,所述托盘组件还包括挡停块,所述挡停块以可拆卸的方式连接于所述托盘本体的位于所述第一方向和所述第一方向的反向的侧边。
12、优选的技术方案中,所述储料模块包括托盘检测组件,所述托盘检测组件包括多个沿所述第一方向排布的检测件。
13、优选的技术方案中,所述托盘组件包括定位块,所述定位块固设于所述托盘本体的在第二方向的侧边,所述第二方向与所述第一方向垂直;
14、所述储料模块还包括托盘定位组件和固定定位件,所述托盘定位组件包括卡板驱动件和定位卡板,所述定位卡板与所述卡板驱动件传动连接,所述卡板驱动件用于驱动所述定位卡板沿所述第二方向运动,所述固定定位件和所述托盘定位组件分别位于所述水平输送机构在所述第二方向上相背的两侧边。
15、优选的技术方案中,所述托盘组件包括可拆卸连接于所述托盘本体的定位顶块,所述定位顶块和所述定位块位于所述托盘本体的沿所述第二方向相背的两侧边。
16、优选的技术方案中,所述上下料模块包括多自由度机械臂和连接于所述多自由度机械臂末端的旋转机械手,所述旋转机械手包括两个夹持组件,两个所述夹持组件呈夹角设置;每个所述夹持组件包括夹持驱动件,所述夹持驱动件的相背两端分别连接有夹持件,所述夹持驱动件用于驱动两个所述夹持件相对靠近或远离。
17、优选的技术方案中,所述上下料模块还包括定位相机组件,所述定位相机组件安装于其中一个所述夹持组件。
技术特征:
1.一种上下料机器人,其特征在于,包括:位移模块(100)、动力控制模块(200)、储料模块(300)和上下料模块(400);
2.根据权利要求1所述的上下料机器人,其特征在于,所述储料模块(300)包括托盘组件(310)和水平输送机构(330);所述托盘组件(310)包括托盘本体(311),所述托盘本体(311)用于盛放工件,所述水平输送机构(330)用于沿第一方向和第一方向反方向传递所述托盘组件(310)。
3.根据权利要求2所述的上下料机器人,其特征在于,所述储料模块(300)包括挡位组件(340),所述挡位组件(340)设置在所述水平输送机构(330)的沿第一方向延伸的一侧和所述水平输送机构(330)的沿所述第一方向的反向延伸的一侧。
4.根据权利要求3所述的上下料机器人,其特征在于,所述挡位组件(340)包括挡位支架(342)和挡位气缸(341),所述挡位气缸(341)安装于所述挡位支架(342),所述挡位气缸(341)的动力输出端安装有挡位传动杆(343),所述挡位传动杆(343)连接有挡位杆(344),所述挡位杆(344)滑动设置于所述挡位支架(342)上。
5.根据权利要求3所述的上下料机器人,其特征在于,所述托盘组件(310)还包括挡停块(314),所述挡停块(314)以可拆卸的方式连接于所述托盘本体(311)的位于所述第一方向和所述第一方向的反向的侧边。
6.根据权利要求3所述的上下料机器人,其特征在于,所述储料模块(300)包括托盘检测组件(320),所述托盘检测组件(320)包括多个沿所述第一方向排布的检测件。
7.根据权利要求2所述的上下料机器人,其特征在于,所述托盘组件(310)包括定位块(315),所述定位块(315)固设于所述托盘本体(311)的在第二方向的侧边,所述第二方向与所述第一方向垂直;
8.根据权利要求7所述的上下料机器人,其特征在于,所述托盘组件(310)包括可拆卸连接于所述托盘本体(311)的定位顶块(316),所述定位顶块(316)和所述定位块(315)位于所述托盘本体(311)的沿所述第二方向相背的两侧边。
9.根据权利要求1-8中任一项所述的上下料机器人,其特征在于,所述上下料模块(400)包括多自由度机械臂(410)和连接于所述多自由度机械臂(410)末端的旋转机械手(420),所述旋转机械手(420)包括两个夹持组件,两个所述夹持组件呈夹角设置;每个所述夹持组件包括夹持驱动件(421),所述夹持驱动件(421)的相背两端分别连接有夹持件(423),所述夹持驱动件(421)用于驱动两个所述夹持件(423)相对靠近或远离。
10.根据权利要求9所述的上下料机器人,其特征在于,所述上下料模块(400)还包括定位相机组件(430),所述定位相机组件(430)安装于其中一个所述夹持组件。
技术总结
本发明提供了一种上下料机器人,涉及机器人技术领域,以解决CNC加工时工人作业条件差的问题。上下料机器人包括:位移模块、动力控制模块、储料模块和上下料模块;动力控制模块安装于位移模块,动力控制模块用于为位移模块、储料模块和上下料模块提供动力和控制信号;储料模块安装于位移模块,储料模块用于容置工件;上下料模块安装于位移模块,上下料模块用于从储料模块取工件并将工件传送至加工位并用于从加工位取工件。本发明提供的上下料机器人可以改善工人的作业条件。
技术研发人员:郭大伟,王争,陈兆芃,黎田
受保护的技术使用者:北京思灵机器人科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!