自动安装凸轮轴的机器人及其控制方法与流程
本申请涉及机器人领域,尤其涉及自动安装凸轮轴的机器人及其控制方法。
背景技术:
1、凸轮轴是活塞发动机里的一个部件,用于控制气门的开启和闭合动作。由于气门运动规律关系到一台发动机的动力和运转特性,因此,凸轮轴的设计与安装在发动机的设计与实现过程中占据着十分重要的地位。由于设计过程中在强度和支撑度方面对凸轮轴有较高的要求,其材质一般是优质合金钢或合金钢。每凸轮轴重量11.7kg,每天两班发动机产量320台左右,现有技术完全依靠人工将凸轮轴安装在发动机的预设位置,工作强度大。
2、此外,现有技术在将凸轮轴安装至发动机中采用手工安装的方式,整个过程包括如下步骤:将发动机机体固定在特定工作台上,由人工首先插入凸轮轴套,然后将凸轮轴插入凸轮轴套内,再借助工具将凸轮轴套拔出。整个过程中对工作人员体力消耗比较大;且安装、拔出过程中凸轮轴、凸轮轴套所受手的推力大小及方向不一致,容易出现凸轮轴、凸轮轴套划伤,装配质量低,直接影响了凸轮轴套的循环重复使用,降低了装配后发动机的性能。
技术实现思路
1、有鉴于此,本申请提供一种自动安装凸轮轴的机器人及其控制方法,以解决现有技术中的凸轮轴安装过程中工作人员劳动强度大、装配质量低的技术问题。
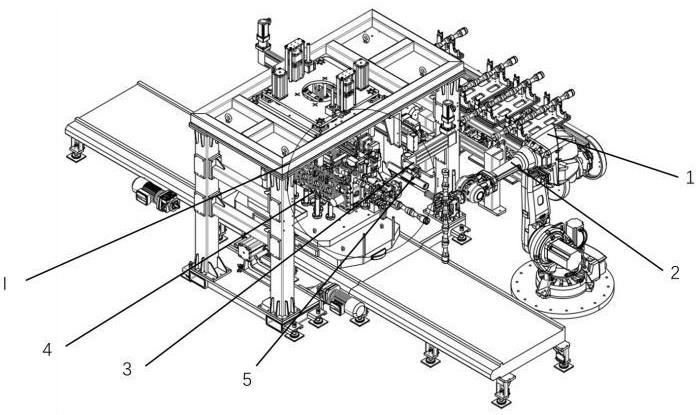
2、本发明第一方面提供自动安装凸轮轴的机器人,具体包括:机器人与上料装置、工作台协作,机器人设置于所述上料装置和所述工作台之间;
3、机器人包括抓取部和推动部,所述抓取部用于抓取凸轮轴;
4、所述工作台包括装配平面和夹取部,主机设于所述工作台的所述装配平面上,所述夹取部用于将凸轮轴套自主机入口插入至所述主机的第一位置,所述第一位置为距离主机入口第一距离的位置,第一距离小于主机入口至主机出口的长度;所述夹取部还被配置为用于将凸轮轴套从主机出口拔出并移动至主机入口处;
5、所述机器人的所述抓取部用于将所述凸轮轴经所述凸轮轴套插入至所述主机的第二位置,所述第二位置为距离主机入口第二距离的位置,第二距离大于第一距离,且第二距离小于主机入口至主机出口的长度;
6、所述机器人的所述推动部将所述凸轮轴自主机的第二位置推送至第三位置,所述第三位置为凸轮轴在所述主机内的安装位置。
7、优选的,上料装置包括传动装置和第一隔板;
8、所述传动装置设置于传动平面上,凸轮轴放置于传动装置上,所述传动装置沿第一方向运动,带动所述凸轮轴向第一方向移动;
9、所述第一隔板用于当凸轮轴移动至预设位置时,挡住运动中的凸轮轴以使其位置固定。
10、优选的,所述工作台的装配平面上方设有辅助导向气缸,夹取部、定位校准部件设于辅助导向气缸上,定位校准部件用于获取z轴方向上的校准位移,辅助导向气缸可在工作台控制器的调度下夹取凸轮轴套运动。
11、优选的,所述工作台包括定位校准部件,所述工作台的夹取部夹取凸轮轴套下降使其移动至主机的主机入口时,定位校准部件检测主机的上表面,基于z轴方向上凸轮轴套端口与主机的主机入口的位置差计算凸轮轴套校准位移,基于凸轮轴套校准位移调整凸轮轴套位置,调整后插入主机内。
12、优选的,所述工作台的装配平面上方设有辅助导向气缸,所述辅助导向气缸在工作台控制器的调度下移动至主机的主机出口处,在所述凸轮轴套从主机出口处伸出时,夹取部夹取凸轮轴套,并向远离主机的方向运动,直至凸轮轴套脱离主机,所述工作台的夹取部夹取凸轮轴套返回至初始位置。
13、优选的,所述工作台的定位校准部件定位主体上表面,计算z轴方向上凸轮轴校准位移,基于凸轮轴校准位移调整凸轮轴位置,调整后经所述凸轮轴套插入至所述主机的第二位置。
14、本发明第二方面提供一种自动安装凸轮轴的机器人控制方法,所述自动安装凸轮轴的机器人控制方法具体包括:
15、工作台的夹取部夹取凸轮轴套自主机入口插入至主机的第一位置,所述第一位置为距离主机入口第一距离的位置,第一距离小于主机入口至主机出口的长度;
16、机器人的抓取部将凸轮轴经所述凸轮轴套插入至所述主机的第二位置,所述第二位置为距离所述主机入口第二距离的位置,所述第二距离大于所述第一距离,且所述第二距离小于主机入口至主机出口的长度;
17、机器人的抓取部脱离已部分插入所述主机内的所述凸轮轴,机器人切换为推动部工作状态,在所述推动部工作状态下,所述机器人的推动部将已部分插入所述主机内的所述凸轮轴推动至第三位置,所述第三位置为所述凸轮轴推入至凸轮轴在所述主机内的安装位置。
18、优选的,所述自动安装凸轮轴的机器人控制方法基于如前述任一项所述的自动安装凸轮轴的机器人实施。
19、优选的,机器人抓取凸轮轴并移动至工作台上的主机入口处,所述抓取凸轮轴之前,包括:
20、检测工作台上主体的匹配目标凸轮轴型号;
21、获取传动装置上盛放凸轮轴的托盘的标记信息,基于标记信息获取传输的凸轮轴型号;
22、对比目标凸轮轴信号和传输的凸轮轴型号;
23、若型号相同,发出取料指令,机器人控制抓取部抓取凸轮轴;否则,返回获取传动装置上盛放凸轮轴的托盘的标记信息的步骤。
24、优选的,所述机器人的抓取部将凸轮轴经所述凸轮轴套插入至所述主机的第二位置,之后,还包括:
25、响应于状态切换信号,所述机器人切换为推动部工作状态,机器人控制器控制抓取部脱离已部分插入所述主机内的所述凸轮轴,所述机器人带动推动部移动至所述凸轮轴未插入主机的一端,利用所述推动部推动已部分插入所述主机内的所述凸轮轴至第三位置。
26、本发明提供的自动安装凸轮轴的机器人及其控制方法,基于工作台和机器人的配合,实现了凸轮轴的全自动安装。基于全自动安装时凸轮轴套插入的第一位置和凸轮轴插入的第二位置的配合,在安装前,使得凸轮轴套能够在主机入口处外露部分,显式地提供安装指引;在安装过程中,减少凸轮轴套和凸轮轴的接触面积,降低了接触摩擦对凸轮轴的损耗,提高了凸轮轴的质量;在安装后,能够基于凸轮轴的推力,推出主机,减少夹取部拉出凸轮轴套的拉力,减少了部件的表面磨损。
技术特征:
1.一种自动安装凸轮轴的机器人,其特征在于,机器人与上料装置、工作台协作,机器人设置于所述上料装置和所述工作台之间;
2.根据权利要求1所述的自动安装凸轮轴的机器人,其特征在于,
3.根据权利要求1所述的自动安装凸轮轴的机器人,其特征在于,
4.根据权利要求1所述的自动安装凸轮轴的机器人,其特征在于,
5.根据权利要求1所述的自动安装凸轮轴的机器人,其特征在于,
6.根据权利要求1所述的自动安装凸轮轴的机器人,其特征在于,
7.一种自动安装凸轮轴的机器人控制方法,其特征在于,所述自动安装凸轮轴的机器人控制方法具体包括:
8.根据权利要求7所述的自动安装凸轮轴的机器人控制方法,其特征在于,所述自动安装凸轮轴的机器人控制方法基于如权利要求1-6中任一项所述的自动安装凸轮轴的机器人实施。
9.根据权利要求7所述的自动安装凸轮轴的机器人控制方法,其特征在于,机器人抓取凸轮轴并移动至工作台上的主机入口处,所述抓取凸轮轴之前,包括:
10.根据权利要求7所述的自动安装凸轮轴的机器人控制方法,其特征在于,所述机器人的抓取部将凸轮轴经所述凸轮轴套插入至所述主机的第二位置,之后,还包括:
技术总结
本申请提供一种自动安装凸轮轴的机器人及其控制方法,机器人包括抓取部和推动部,抓取部用于抓取凸轮轴;工作台包括装配平面和夹取部,主机设于工作台的装配平面上,夹取部用于将凸轮轴套自主机入口插入至主机的第一位置,夹取部还被配置为用于将凸轮轴套自主机出口拔出并移动至主机入口处;机器人的抓取部用于将凸轮轴经凸轮轴套插入至主机的第二位置;机器人的推动部将凸轮轴自主机的第二位置推送至第三位置,第三位置为凸轮轴在主机内的安装位置。提高了安装效率,降低安装劳动力,提高了安装后的产品质量。
技术研发人员:陈伟才,刘世泽,段明皞,李安,程金,张希,周仲波
受保护的技术使用者:北京机械工业自动化研究所有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!