一种泥水平衡盾构机用混联式换刀机器人及其工作方法
本发明涉及一种泥水平衡盾构机用混联式换刀机器人及其工作方法,属于盾构机换刀。
背景技术:
1、随着城市化的进程加快,我国对于城市地铁、管廊工程、公路隧道、穿江越海隧道等交通工程的需求量大大提升。因此,具有掘进速度快、对生态破坏性小、综合效益高等优点的盾构法施工技术在我国得到大规模的推进以及应用。
2、在盾构机的掘进过程中,刀具的磨损是避免不了的,其性能状态及磨损实时状况直接影响工程建设的质量和进程。目前盾构机刀具更换技术都需要人工进入盾构机内部进行作业,成本高、风险大,对于15m以上的大直径泥水平衡盾构机,滚刀的数量达上百把,刀筒重1300kg,且分布在多个刀腔,每把滚刀更换的时间都在四个小时以上,刀具更换的总时间占整个施工周期的30%以上。
3、申请号201811538565.x公开的盾构换刀机器人针对tbm结构特点,采用剪式升降机作为升降主体来克服盾构机的狭长空间,采用液压马达驱动加双轨道来克服滚刀的重量(滚刀重250kg)。但由于泥水平衡盾构直径tbm更大,达15m,且更换的是整个刀筒,不仅占用了1.2m的横向空间,还使负载上升到了1300kg,剪式升降机占用空间大,液压驱动控制精度也不如电液伺服控制精度,所以这种方法不适合于大直径泥水平衡盾构机。
技术实现思路
1、本发明要解决的技术问题是,克服现有技术的缺陷,提供一种泥水平衡盾构机用混联式换刀机器人及其工作方法,能够解决大直径泥水平衡盾构机进行换刀时存在负载大、空间狭长和刀腔分隔的问题。
2、为解决上述技术问题,本发明采用的技术方案为:
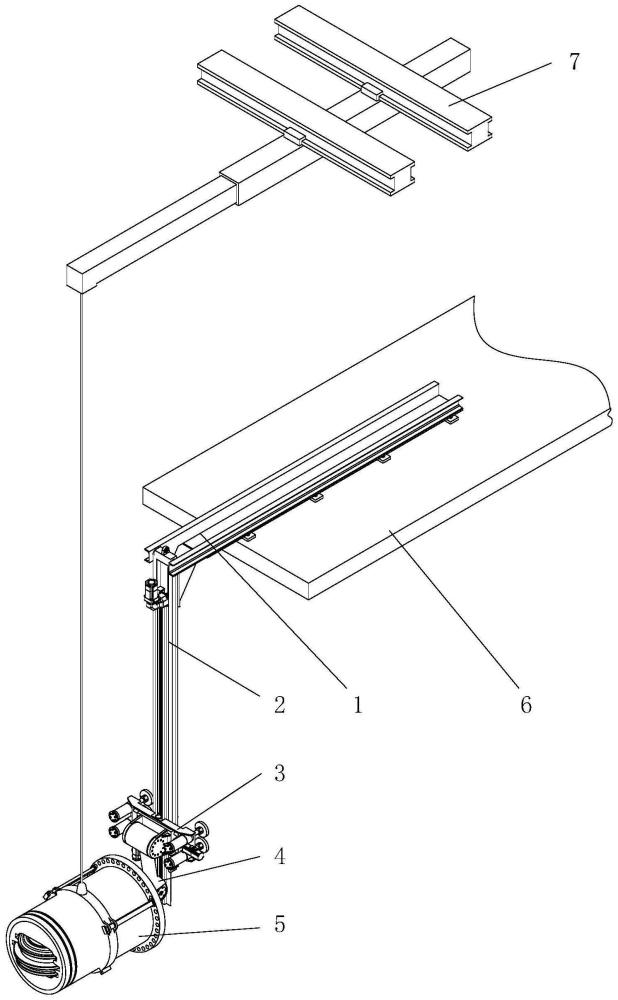
3、一种泥水平衡盾构机用混联式换刀机器人,包括固定基座,所述固定基座固定在中央仓平台上,所述固定基座上滑动连接有多级伸缩轨道,所述多级伸缩轨道下部铰接连接有移动偏转平台,所述移动偏转平台上连接有用于更换刀筒的机械臂,所述中央仓平台上方设置有中央仓顶板,所述中央仓顶板上固定有桁架,所述桁架通过钢索与所述多级伸缩轨道和刀筒连接。
4、所述固定基座前端内侧两边装有凸台,所述固定基座前端下部焊接有轨道限位板,所述多级伸缩轨道包括一级轨道和二级轨道,所述二级轨道滑动设置在所述一级轨道内,所述一级轨道外侧焊接有u形滑槽,所述u形滑槽与所述固定基座上的所述凸台形成滑动连接,并相对于所述固定基座进行移动翻转,所述一级轨道尾部设有吊耳,所述吊耳用于与所述桁架连接,通过所述桁架的辅助对所述多级伸缩轨道进行移动翻转。
5、所述一级轨道内设置有第一齿条,所述二级轨道端部外表面设置有第二滑块,所述二级轨道末端安装有第一伺服电机,所述第一伺服电机上通过第一直角减速器安装有小齿轮,所述小齿轮与所述第一齿条啮合进行传动,所述一级轨道内侧面装有第一滑块和限位块,所述限位块上设置有接近开关,所述一级轨道背面设置有与所述固定基座配合的轴承滚轮。
6、所述二级轨道外表面装有第二齿条,并嵌有第一十字铰,所述第一十字铰上设置有第三滑块,所述第一十字铰上安装有第二伺服电机,所述第二伺服电机通过第二直角减速器安装有大齿轮,所述大齿轮与所述二级轨道上的所述第二齿条啮合进行传动,所述移动偏转平台上设置有与所述第一十字铰进行配合固定的第二十字铰。
7、所述移动偏转平台上安装有液压推杆、光杆和滚柱丝杆副,所述液压推杆末端装有铰接座,用于与盾构机刀盘连接,通过控制所述液压推杆的推出长度来实现所述移动偏转平台的左右偏航,所述移动偏转平台上安装有第三伺服电机,所述滚珠丝杆副通过所述第三伺服电机驱动。
8、所述机械臂包括机械臂横移基台,所述械臂基台一侧设有接口与所述光杆及滚珠丝杆副连接,另一侧与摆动臂连接,所述摆动臂通过第一螺旋摆动缸驱动,所述摆动臂末端与伸缩臂连接,所述伸缩臂通过第二螺旋摆动缸调整角度,所述伸缩臂内装有多级伸缩缸,所述伸缩臂末端与所述旋转臂连接,所述旋转臂内装有第四伺服电机和谐波减速器,所述旋转臂末端与自对心扭转接头连接,所述自对心扭转接头用于与所述刀筒末端连接。
9、一种泥水平衡盾构机用混联式换刀机器人的工作方法,用于更换刀盘中心的被磨损滚刀,包括以下步骤:
10、泥水平衡盾构机将需要更换的刀筒位置大致转至竖直中心线附近,第二伺服电机驱动移动偏转平台来到被换刀筒附近,然后液压推杆伸出,铰接座通过电磁吸附在中央仓平台上,第三伺服电机驱动滚珠丝杆副来微调机械臂横移基台的左右位置,机械臂的摆动臂、伸缩臂通过液压驱动,配合机器视觉开始调整机械臂的角度与长度,到达被换刀筒后方一定距离的预定位置后,旋转臂通过第四伺服电机转到合适角度,再次驱动伸缩臂进行伸长,直到自对心扭转接头接触刀筒末端,随后旋转臂通过伺服电机驱动转动,使自对心扭转接头通过刀筒末端设置的导向槽嵌入预设卡槽,随后伸缩臂收缩,抽出刀筒,配合桁架完成刀筒的拆卸;
11、桁架将需要更换的刀筒吊放致对应刀孔的大致位置,第一伺服电机和第二伺服电机驱动移动偏转平台来到被换刀筒附近,通过液压驱动控制平台两侧的液压推杆伸出指定距离,方便铰接座通过电磁吸附在中央仓平台上,然后再次通过液压驱动控制平台两侧的液压推杆伸出不同的长度,使平台偏转适当角度,通过机器视觉及电液伺服控制将自对心扭转接头嵌入刀筒末端卡槽中,使机械臂与刀筒连接,随后机械臂开始配合桁架一起调整刀筒的位姿;
12、当刀筒位姿调整到刀筒可以无阻碍地插入对应刀孔,并且滚刀的角度调整为对应位置合适的切削角度后,伸缩臂与桁架协同配合伸长,将刀筒推入刀孔,完成刀盘中心的滚刀的更换。
13、一种泥水平衡盾构机用混联式换刀机器人的工作方法,用于更换除刀盘半径中间或刀盘边缘的滚刀,包括以下步骤:
14、将需要更换的刀筒位置大致转至竖直中心线附近,随后使用桁架,通过一级轨道上的吊耳将多级伸缩轨道提起,然后桁架前进,期间多级伸缩轨道会以固定基座上的凸台为旋转中心进行移动翻转,轨道限位板则会限制多级伸缩轨道的最大移动翻转角度,保证多级伸缩轨道竖直放置,随后桁架将多级伸缩轨道下放,直至凸台与u形滑槽末端接触,完成多级伸缩轨道的竖直部署;
15、泥水平衡盾构机将需要更换的刀筒位置大致转至竖直中心线附近,第一伺服电机和第二伺服电机驱动移动偏转平台来到被换刀筒附近,然后液压推杆伸出,铰接座通过电磁吸附在刀盘背板上,第三伺服电机驱动滚珠丝杆副来微调机械臂横移基台的左右位置,机械臂的摆动臂、伸缩臂通过液压驱动,配合机器视觉开始调整机械臂的角度与长度,到达被换刀筒后方一定距离的预定位置后,旋转臂通过第四伺服电机转到合适角度,再次驱动伸缩臂进行伸长,直到自对心扭转接头接触刀筒末端,随后旋转臂通过伺服电机驱动转动,使自对心扭转接头通过刀筒末端设置的导向槽嵌入预设卡槽,使机械臂与刀筒连接,随后伸缩臂收缩,抽出刀筒,配合桁架完成刀筒的拆卸;
16、桁架将需要更换的刀筒吊放致指定刀孔的大致位置,第一伺服电机和第二伺服电机驱动移动偏转平台来到被换刀筒附近,通过液压驱动控制平台两侧的液压推杆伸出指定距离,方便铰接座通过电磁吸附在刀盘背板竖直面上,然后再次通过液压驱动控制平台两侧的液压推杆伸出不同的长度,使平台偏转适当角度,通过机器视觉及电液伺服控制将自对心扭转接头嵌入刀筒末端卡槽中,随后机械臂开始调整刀筒位姿;
17、当刀筒位姿调整到刀筒可以无阻碍地插入刀孔,并且滚刀的角度调整为对应位置合适的切削角度后,伸缩臂与桁架协同配合伸长,将刀筒推入刀孔,完成除刀盘中心以外的滚刀的更换。
18、本发明的有益效果:本发明提供的一种泥水平衡盾构机用混联式换刀机器人及其工作方法,采用可移动翻转的齿轮齿条传动的多级伸缩轨道,能够进一步减少横向方向上所占空间,克服更换刀筒时纵狭长空间和分隔刀腔,采用换刀机器人与桁架配合的方式,让桁架承受搬运刀筒时的大重量,减少换刀机器人负载,以便更精确的定位和调整刀筒的位姿;利用液压推杆加吸附式铰接座将换刀机械臂推拉刀筒时的力传递给刀盘背板或中央仓平台,从而减少多级伸缩轨道受力,使其可以设计得更加轻量化;采用电液伺服控制,既能克服大负载,又能使定位更精确。
- 还没有人留言评论。精彩留言会获得点赞!