用于极片分切设备的激光调焦方法及极片分切设备与流程
本发明属于锂电池生产,具体提供一种用于极片分切设备的调焦方法及极片分切设备。
背景技术:
1、激光分切极片使用的激光一般为四类激光,人眼无法目视。另外,为了追求锂电池极片的质量(例如:热影响区小、毛刺小),激光分切使用的镜头一般是低景深的定焦场镜,这种镜头通过辅助光点的大小很难确定最佳的切割距离(即使镜头在远离或者靠近待切物的过程中,已经超出了最佳的切割范围,人眼仍然无法有效分辨辅助光点的大小变化)。
2、目前,现有的激光分切调试中还是基于切割效果来确定最佳的切割距离。先确定一个明显不在最佳切割的位置的距离,进行一个特征的切割,再往最佳位置靠近,再切一个特征看切割效果,直到找到能切除合格的极片位置才能确定最佳的切割位置。在整个过程中,需要品质判断人员和设备操作人员不停地配合,并且要依赖经验,且耗费大量的时间和人力资源,使得调焦操作麻烦且耗费时间长。
3、相应地,本领域需要一种新的技术方案来解决上述技术问题。
技术实现思路
1、本发明旨在解决上述技术问题,即,解决现有的激光调焦方法耗费人力,操作繁琐且时间长的问题。
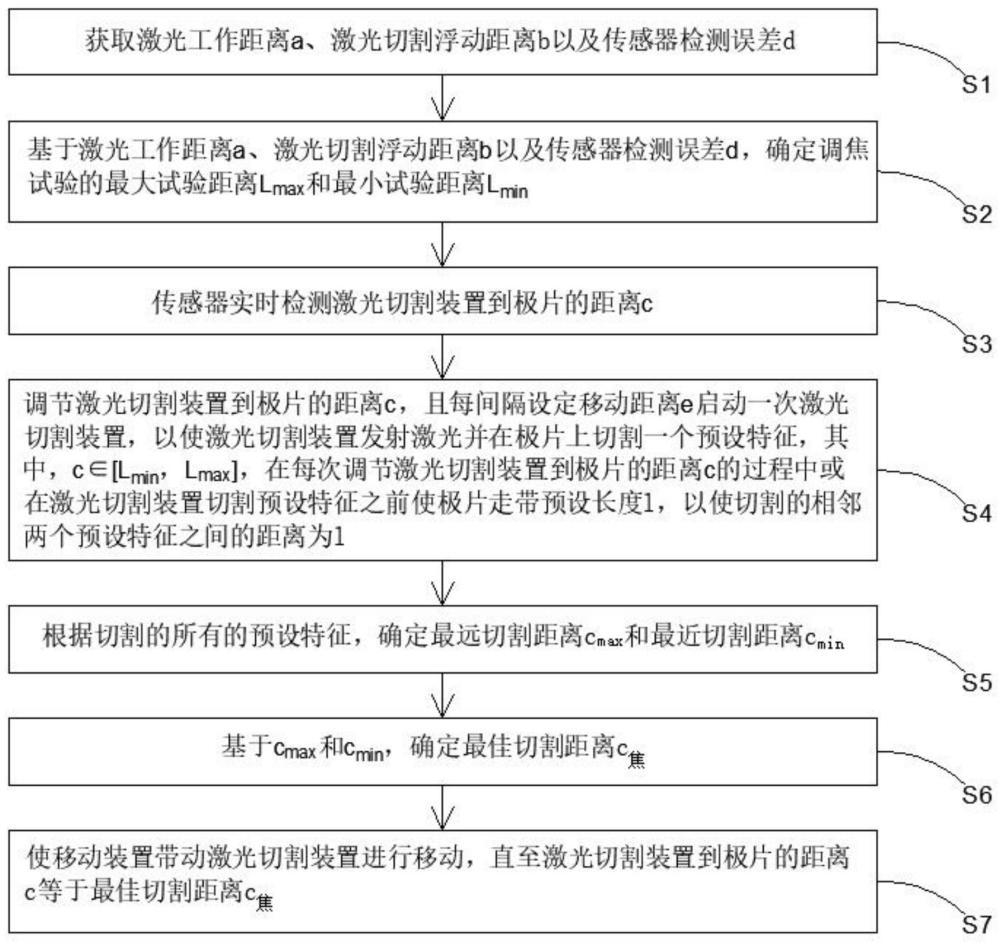
2、在第一方面,本发明提供一种用于极片分切设备的激光调焦方法,所述极片分切设备包括激光切割装置、传感器、极片以及移动装置,所述激光切割装置安装在所述移动装置上,所述激光切割装置朝向所述极片设置且其能够发射激光以将所述极片进行切割,所述移动装置设置成能够带动所述激光切割装置朝向和背离所述极片移动以调节所述激光切割装置到所述极片的距离,所述传感器用于检测激光切割装置到所述极片的距离;所述激光调焦方法包括以下步骤:s1:获取激光工作距离a、激光切割浮动距离b以及传感器检测误差d;s2:基于所述激光工作距离a、所述激光切割浮动距离b以及所述传感器检测误差d,确定调焦试验的最大试验距离lmax和最小试验距离lmin;s3:传感器实时检测所述激光切割装置到所述极片的距离c;s4:调节所述激光切割装置到所述极片的距离c,且每间隔设定移动距离e启动一次所述激光切割装置,以使所述激光切割装置发射激光并在所述极片上切割一个预设特征,其中,c∈[lmin,lmax],在每次调节所述激光切割装置到极片的距离c的过程中或在所述激光切割装置切割所述预设特征之前使所述极片走带预设长度l,以使切割的相邻两个所述预设特征之间的距离为l;s5:根据切割的所有的所述预设特征,确定最远切割距离cmax和最近切割距离cmin;
3、s6:基于cmax和cmin,确定最佳切割距离c焦;s7:使所述移动装置带动所述激光切割装置进行移动,直至所述激光切割装置到所述极片的距离c等于所述最佳切割距离c焦。
4、在上述用于极片分切设备的激光调焦方法的优选技术方案中,步骤s4具体包括以下步骤:s41:使所述移动装置带动所述激光切割装置移动,将所述激光切割装置到所述极片的距离c调节至c=c1=lmax;
5、s42:启动所述激光切割装置,使所述激光切割装置发射激光并在所述极片上切割一个所述预设特征;s43:使所述极片走带预设长度l;s44:再次使所述移动装置带动所述激光切割装置移动,将所述激光切割装置朝向所述极片移动设定距离e,使所述激光切割装置到所述极片的距离c=cn=lmax-(n-1)×e,其中,n为所述激光切割装置的调节次数;s45:再次启动所述激光切割装置,使所述激光切割装置发射激光并在所述极片上切割一个所述预设特征;s46:重复步骤s43、s44和s45,直至lmax-(n-1)×e≤lmin后执行步骤s5。
6、在上述用于极片分切设备的激光调焦方法的优选技术方案中,步骤s5具体包括以下步骤:s51:识别切割的所有的所述预设特征;
7、s52:确定第一个切透所述极片的所述预设特征,并基于第一个切透所述极片的所述预设特征,确定最远切割距离cmax;s53:确定最后一个切透所述极片的所述预设特征,并基于最后一个切透所述极片的所述预设特征,确定最近切割距离cmin。
8、在上述用于极片分切设备的激光调焦方法的优选技术方案中,步骤s4具体包括以下步骤:s41:使所述移动装置带动所述激光切割装置移动,将所述激光切割装置到所述极片的距离c调节至c=c1=lmin;
9、s42:启动所述激光切割装置,使所述激光切割装置发射激光并在所述极片上切割一个所述预设特征;s43:使所述极片走带预设长度l;s44:再次使所述移动装置带动所述激光切割装置移动,将所述激光切割装置背离所述极片移动设定距离e,使所述激光切割装置到所述极片的距离c=cn=lmin+(n-1)×e,其中,n为所述激光切割装置的调节次数;s45:再次启动所述激光切割装置,使所述激光切割装置发射激光并在所述极片上切割一个所述预设特征;s46:重复步骤s43、s44和s45,直至lmin+(n-1)×e≥lmax后执行步骤s5。
10、在上述用于极片分切设备的激光调焦方法的优选技术方案中,步骤s5具体包括以下步骤:s51:识别切割的所有的所述预设特征;
11、s52:确定第一个切透所述极片的所述预设特征,并基于第一个切透所述极片的所述预设特征,确定最近切割距离cmin;s53:确定最后一个切透所述极片的所述预设特征,并基于最后一个切透所述极片的所述预设特征,确定最远切割距离cmax。
12、在上述用于极片分切设备的激光调焦方法的优选技术方案中,步骤s2中,lmax=a+b+d,lmin=a-b-d;和/或,步骤s6中,c焦=(cmax+cmin)÷2。
13、在上述用于极片分切设备的激光调焦方法的优选技术方案中,所述激光切割装置的数量为多个,每个所述激光切割装置安装在一个所述移动装置上,多个所述激光切割装置沿第一方向等间距间隔分布,所述传感器包括第一传感器和第二传感器,所述第一传感器设置在位于其一端部的一个所述激光切割装置上,所述第二传感器设置在另一个所述激光切割装置上,所述第一传感器和所述第二传感器分别检测其所对应的所述激光切割装置到所述极片的距离;所述激光调焦方法包括以下步骤:s1:第一传感器检测其所对应的第一个激光切割装置到所述极片的第一初始距离c1初始;s2:第二传感器检测其所对应的第n个所述激光切割装置到所述极片的第n初始距离cn初始;s3:基于第一初始距离c1初始和第n初始距离cn初始,确定距离等差变化率k;s4:获取激光工作距离a、激光切割浮动距离b以及传感器检测误差d;s5:基于所述激光工作距离a、所述激光切割浮动距离b以及所述传感器检测误差d,确定调焦试验的最大试验距离lmax和最小试验距离lmin;s6:第一传感器实时检测其所对应的第一个激光切割装置到所述极片的距离c1;s7:调节第一个所述激光切割装置到所述极片的距离c1,且每间隔设定移动距离e启动一次第一个所述激光切割装置,以使第一个所述激光切割装置发射激光并在所述极片上切割一个预设特征,其中,c1∈[lmin,lmax],在每次调节第一个所述激光切割装置到所述极片的距离c1的过程中或在第一个所述激光切割装置切割所述预设特征之前,使所述极片走带预设长度l,以使切割的相邻的两个所述预设特征之间的距离为l;s8:根据切割的所有的所述预设特征,确定最远切割距离cmax1和最近切割距离cmin1;s9:基于cmax1和cmin1,确定所述激光切割装置所对应的最佳切割距离c焦1;s10:基于c1初始和c焦1,确定第一个所述激光切割装置所对应的所述移动装置的移动距离z1;s11:基于z1和距离等差变化率k,确定第m个所述激光切割装置所对应的所述移动装置的移动距离zm;s12:使每个所述移动装置按照其所对应的所述移动距离进行移动,以将每个所述激光切割装置到所述极片的距离c调节至其对应的所述最佳切割距离。
14、在上述用于极片分切设备的激光调焦方法的优选技术方案中,步骤s3中,
15、在上述用于极片分切设备的激光调焦方法的优选技术方案中,步骤s10中,z1=c1初始-c焦1;步骤s11中,zm=z1+(m-1)×k,其中,m为从第一个所述激光切割装置起算的第m个所述激光切割装置;当zm为负数时,所述移动装置的移动方向为远离所述极片的方向,当zm为正数时,所述移动装置的移动方向为朝向所述极片的方向。
16、在第二方面,本发明提供一种极片分切设备,所述极片分切设备包括处理器,所述处理器配置成能够执行上述的激光调焦方法。
17、在采用上述技术方案的情况下,本发明的激光调焦方法,通过处理器来控制移动装置运行,以调节激光切割装置到极片的距离,实现自动调节距离、切割和记录,并且根据切割后的预设特征来进行识别,并确定切割效果好的预设特征,根据相对应的预设特征的位置以及所对应的激光切割装置到极片的距离,确定最佳切割距离,采用图像识别模块进行识别操作时,能够实现自动对焦,无需人工干预,而采用人工识别时,则也无需多人干预,一个人即可完成识别操作,调焦效率高,且精度更高。
18、具体地,本发明的激光调焦方法通过在最大试验距离和最小试验距离之间不断改变激光切割装置到极片的距离,并且在每个位置切割一个预设特征,通过多个预设特征来确定最远切割距离和最近切割距离,并根据最远切割距离和最近切割距离,确定最佳切割距离,从而确定激光切割装置相对于极片的位置(即焦距),在实际分切前,将激光切割装置移动至与极片之间的距离为最佳切割距离处即可此外,通过传感器实时检测激光切割装置到极片的距离c,传感器实时检测距离,能够保证每次调整激光切割装置的位置时都能够精准到位。
- 还没有人留言评论。精彩留言会获得点赞!