焊枪末端偏差校准方法、装置、存储介质与电子设备与流程
本技术涉及焊接,具体而言,涉及一种焊枪末端偏差校准方法、装置、存储介质与电子设备。
背景技术:
1、在自动化焊接过程中,焊枪末端要始终对准焊缝的焊接位置并跟踪焊缝,如果焊枪末端和焊缝的相对位置存在预定的偏差,则极易导致气孔、焊不透等焊接缺陷。爬行焊接机器人通过视觉跟踪系统自动识别焊缝位置,具有较好的灵活性可满足复杂大型结构件焊接的需求。
2、由于焊接机器人(例如,爬壁焊接机器人)没有固定的坐标系,需要经过标定系统,获取视觉系统与执行机构的关系模型,才能从视觉坐标系转化到执行机构末端,引导焊枪执行焊接操作。执行末端跟踪精度严重依赖离线校准结果,而在理想情况下建立的激光模块和焊枪的相对关系,会随着激光支架的震动、爬行机器人运动过程中本身的起伏、工件不平整、激光前置和焊接热变形等情况,造成这种相对关系不是精确的位置与姿态。导致标定时采用的激光平面和焊枪平面,与实际使用过程中发生了改变,最终必然会导致精度降低,影响最终的测量精度。
3、另外,爬行焊接机器人所处的三维曲面环境可能是变化的,或者工件曲率不同,而将不同环境中的模型应用于新环境时效果将大打折扣,难以实现准确的校准并实现精确焊接任务。
4、再者,整个多层多道焊接过程中涉及到坡口打磨、每一道焊接完成后都需要进行层间清理,很多高强钢场景还需要保温、加热等,在整个焊接工程制造过程中,不会有大量的时间让焊接机器人停下来进行精细化标定等工作,因此,为保证焊接质量,需要快速高效的方式进行焊枪末端偏差的及时校准。
技术实现思路
1、本技术的主要目的在于提供一种焊枪末端偏差校准方法、焊枪末端偏差校准装置、存储介质、处理器和电子设备,以至少解决相关技术中缺乏一种精准的及时校准焊枪末端偏差的方案的问题。
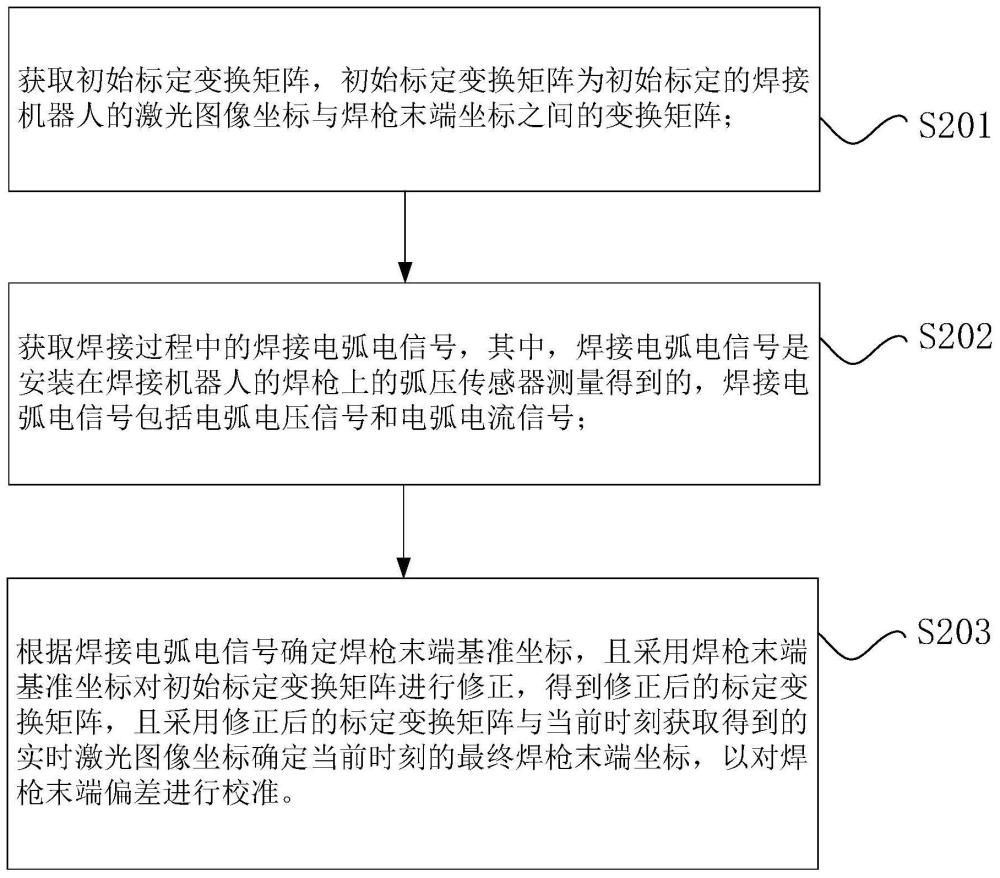
2、为了实现上述目的,根据本技术的一个方面,提供了一种焊枪末端偏差校准方法,所述方法应用于焊接机器人,包括:获取初始标定变换矩阵,所述初始标定变换矩阵为初始标定的所述焊接机器人的激光图像坐标与焊枪末端坐标之间的变换矩阵;获取焊接过程中的焊接电弧电信号,其中,所述焊接电弧电信号是安装在所述焊接机器人的焊枪上的弧压传感器测量得到的,所述焊接电弧电信号包括电弧电压信号和电弧电流信号;根据所述焊接电弧电信号确定焊枪末端基准坐标,且采用所述焊枪末端基准坐标对所述初始标定变换矩阵进行修正,得到修正后的标定变换矩阵,且采用所述修正后的标定变换矩阵与当前时刻获取得到的实时激光图像坐标确定所述当前时刻的最终焊枪末端坐标,以对焊枪末端偏差进行校准。
3、可选地,采用所述焊枪末端基准坐标对所述初始标定变换矩阵进行修正,得到修正后的标定变换矩阵,包括:构建初始修正矩阵;获取所述焊枪末端基准坐标与计算坐标wri的差值,其中,w表示所述初始修正矩阵,r表示所述初始标定变换矩阵,i表示所述当前时刻之前的历史时刻获取得到的实时激光图像坐标;采用所述差值对所述初始标定变换矩阵进行修正,得到所述修正后的标定变换矩阵,所述修正后的标定变换矩阵表示为更新后的修正矩阵与所述初始标定变换矩阵相乘。
4、可选地,采用所述差值对所述初始标定变换矩阵进行修正,得到所述修正后的标定变换矩阵,包括:构建第一目标函数其中,ei=hi-wrii,i=1至l,hi表示第i个所述焊枪末端基准坐标,ei表示第i个所述差值,l表示窗口的长度;以满足所述第一目标函数为目标,采用矩阵最小二乘法求解算法,求解得到第一修正矩阵为w1=[(ri)t(ri)]-1(ri)th,h=[hi,l,hl],其中,所述第一修正矩阵视为对所述初始修正矩阵更新后的得到的修正矩阵;将所述第一修正矩阵与所述初始标定变换矩阵的乘积w1r确定所述修正后的标定变换矩阵。
5、可选地,采用所述差值对所述初始标定变换矩阵进行修正,得到所述修正后的标定变换矩阵,包括:构建第二目标函数其中,ei=hi-wrii,ei表示第i个所述差值,l表示窗口的长度,ui表示第i个所述差值的权重;以满足所述第二目标函数为目标,采用矩阵最小二乘法求解算法,求解得到第二修正矩阵w2,其中,所述第二修正矩阵视为对所述初始修正矩阵更新后的得到的修正矩阵;将所述第二修正矩阵与所述初始标定变换矩阵的乘积w2r确定所述修正后的标定变换矩阵。
6、可选地,所述方法还包括:采用wt+1'=argmin[d(wt+1,wt)]+ηtξ(ht,wt+1rit)实现对所述更新后的修正矩阵修正,其中,wt+1'表示对第t+1次计算得到的所述更新后的修正矩阵的再次修正后得到的矩阵,wt+1表述第t+1次计算得到的所述更新后的修正矩阵的,wt表述第t次计算得到的所述更新后的修正矩阵,d(wt+1,wt)表示wt+1与wt之间的距离,ηt表示学习率,ξ(ht,wt+1rit)表示第t+1次计算的误差。
7、可选地,所述方法还包括:采用二范数算法计算d(wt+1,wt),得到其中,e=[e1,l,el],其中,ei=hi-wrii,i=1至l,ei表示第i个所述差值,u=[u1,l,ul],其中ui为第i个所述差值的权重。
8、可选地,在采用二范数算法计算d(wt+1,wt),得到之后,所述方法还包括:
9、以满足最小为目标,采用矩阵最小二乘法求解算法,求解得到wt+1=m-1(ri)tuh+m-1(ri)tuth+m-1wt,其中,m=(ri)tut(ri)+(ri)tut(ri),h表示所述焊枪末端基准坐标。
10、可选地,所述方法还包括:确定是否满足第一预设条件其中,ei=hi-wrii,i=1至l,hi表示第i个所述焊枪末端基准坐标,ei表示第i个所述差值,l表示窗口的长度,θ为设置的阈值;在满足所述第一预设条件的情况下,确定对所述初始修正矩阵进行修正,所述初始修正矩阵对应于前一次得到的修正矩阵,对所述初始修正矩阵进行修正后得到的矩阵对应于当前次得到的修正矩阵;确定是否满足第二预设条件wi+1表示第i+1次计算得到的修正矩阵,w表示第i次计算得到的修正矩阵,ω为设置的阈值;在满足所述第二预设条件的情况下,停止更新修正矩阵。
11、根据本技术的另一方面,提供了一种焊枪末端偏差校准装置,所述装置应用于焊接机器人,包括:第一获取单元,用于获取初始标定变换矩阵,所述初始标定变换矩阵为初始标定的所述焊接机器人的激光图像坐标与焊枪末端坐标之间的变换矩阵;第二获取单元,用于获取焊接过程中的焊接电弧电信号,其中,所述焊接电弧电信号是安装在所述焊接机器人的焊枪上的弧压传感器测量得到的,所述焊接电弧电信号包括电弧电压信号和电弧电流信号;修正单元,用于根据所述焊接电弧电信号确定焊枪末端基准坐标,且采用所述焊枪末端基准坐标对所述初始标定变换矩阵进行修正,得到修正后的标定变换矩阵,且采用所述修正后的标定变换矩阵与当前时刻获取得到的实时激光图像坐标确定所述当前时刻的最终焊枪末端坐标,以对焊枪末端偏差进行校准。
12、根据本技术的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的焊枪末端偏差校准方法。
13、根据本技术的又一方面,提供了一种电子设备,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的焊枪末端偏差校准方法。
14、应用本技术的技术方案,通过获取初始标定变换矩阵和焊接过程中的焊接电弧电信号,根据焊接电弧电信号确定焊枪末端基准坐标,且采用焊枪末端基准坐标对初始标定变换矩阵进行修正,得到修正后的标定变换矩阵,且采用修正后的标定变换矩阵与当前时刻获取得到的实时激光图像坐标确定当前时刻的最终焊枪末端坐标,以对焊枪末端偏差进行校准。采用焊接电弧电信号得到的焊枪末端基准坐标对标定变换矩阵进行修正,实现满足实时性要求的焊接在线校准及跟踪,提高移动焊接机器人在复杂三维曲线的适应性,并保证高效率高质量的焊接操作。
- 还没有人留言评论。精彩留言会获得点赞!