一种方便对螺套进行加持的螺套安装机器人的制作方法
本技术涉及螺套安装,具体为一种方便对螺套进行加持的螺套安装机器人。
背景技术:
1、螺套一般指钢丝螺套,钢丝螺套是一种新型的内螺纹紧固件,适用于螺纹连接,旋入并紧固在被连接件之一的螺纹孔中,形成标准内螺纹,螺栓(或螺钉)再拧入其中,又名螺纹丝套,简称丝套。它是用高强度、高精度、表面光洁的冷轧菱形不锈钢丝精确加工而成的一种弹簧状内外螺纹同心体,主要用于增强和保护低强度材质的内螺纹。其原理是在螺钉和基体内螺纹之间形成弹性连接,消除螺纹制造误差,提高连接强度,具有连接强度高,抗震、抗冲击和耐磨损的功能,并能分散应力保护基体螺纹,大大延长基体的使用寿命,广泛应用于电子应用。
2、在实际使用情况下,需要安装螺套的工件的尺寸不同,现有的螺套安装装置在使用的过程中只能单次安装一个螺套零件,从而导致螺套安装的过程中,螺套零件需要重复进行上料处理,从而导致现有螺套安装装置的工作效率较低,所以我们提出了一种方便对螺套进行加持的螺套安装机器人,以便于解决上述中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种方便对螺套进行加持的螺套安装机器人,以解决上述背景技术提出的目前市场上的问题。
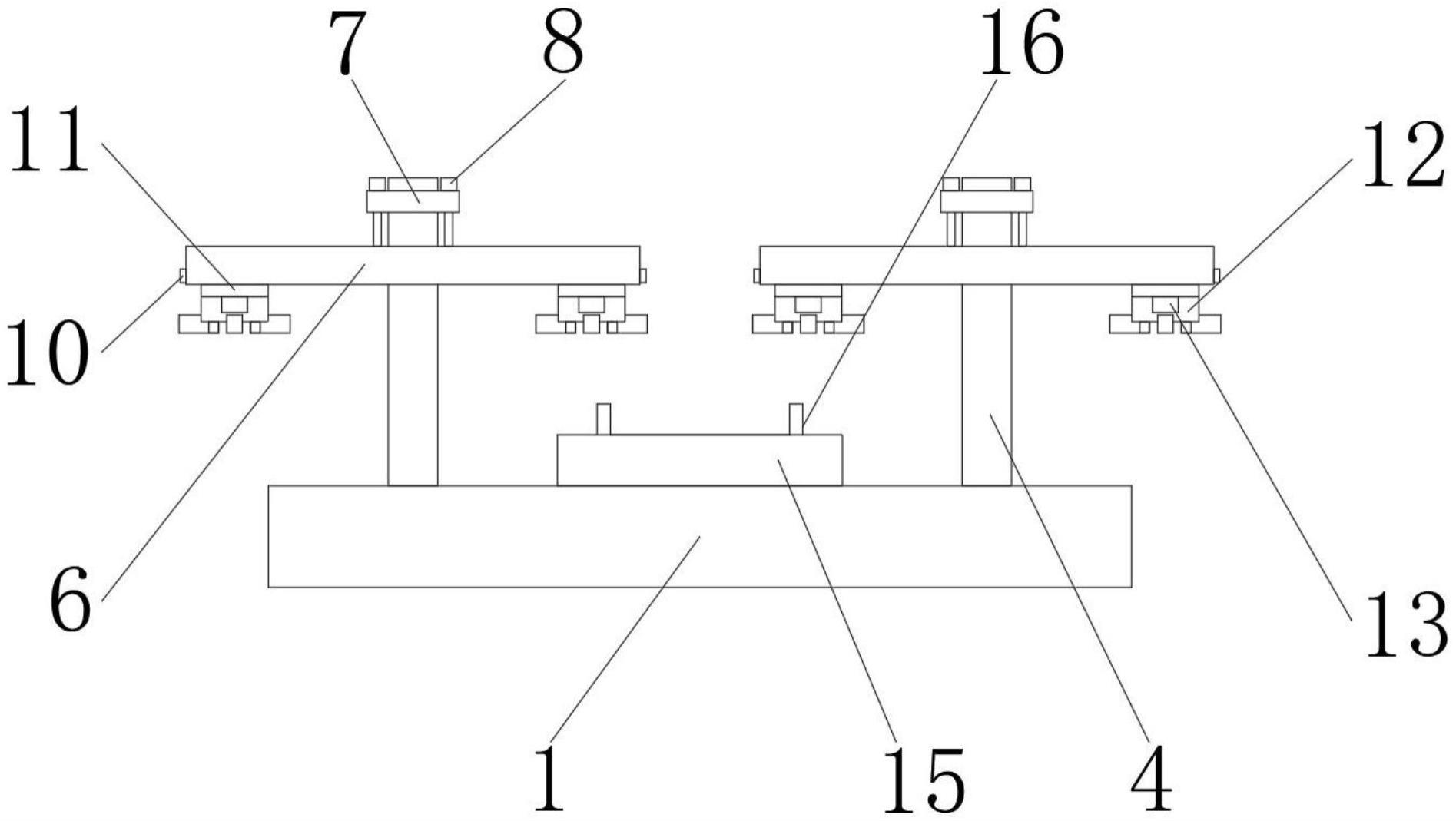
2、为实现上述目的,本实用新型提供如下技术方案:一种方便对螺套进行加持的螺套安装机器人,包括装置底座,所述装置底座上表面的中间位置设置有固定块,所述固定块的内部设置有活动夹板,所述活动夹板的外表面与固定块的内表面之间连接有伸缩弹簧。
3、优选的,所述装置底座的上表面开设有放置槽,所述放置槽的内部设置有第一驱动电机,所述第一驱动电机的上表面连接有旋转柱,所述旋转柱的外表面开设有升降槽,所述升降槽的内部设置有转盘,所述放置槽对称开设在装置底座的上表面,所述第一驱动电机与放置槽内部的底面之间为固定连接,所述旋转柱与第一驱动电机的顶端之间为固定连接,且旋转柱通过第一驱动电机在装置底座的上表面构成旋转结构,所述升降槽对称开设在旋转柱的两侧,所述转盘与旋转柱的外表面之间为滑动连接。
4、优选的,所述旋转柱外表面的顶端设置有固定盘,所述固定盘的上表面设置有电动伸缩杆,且电动伸缩杆的底部与转盘的上表面相连接,所述转盘的底面开设有限位滑槽,所述限位滑槽的内部设置有螺纹杆,所述螺纹杆的外表面设置有滑动板,且滑动板的底部设置在限位滑槽的内部,所述滑动板的底面设置有三爪卡盘,所述三爪卡盘的侧面设置有第二驱动电机,所述第二驱动电机与三爪卡盘之间连接有驱动杆,所述固定盘与旋转柱的外表面之间为固定连接,所述电动伸缩杆对称设置在固定盘的上表面,且电动伸缩杆与固定盘的上表面之间为固定连接,所述转盘通过电动伸缩杆在升降槽的内部构成上下移动结构,所述限位滑槽均匀开设在转盘的底面,所述螺纹杆与转盘之间为轴承连接,且螺纹杆与滑动板之间为螺纹连接,所述滑动板通过螺纹杆在限位滑槽的内部构成左右移动结构,所述三爪卡盘与滑动板的底面之间为固定连接,所述第二驱动电机与滑动板的底面之间为固定连接,且第二驱动电机设置在三爪卡盘的侧面,所述驱动杆与第二驱动电机之间为固定连接,且驱动杆通过第二驱动电机构成旋转结构,所述驱动杆与三爪卡盘之间为固定连接。
5、优选的,所述固定块与装置底座上表面的中间位置之间为固定连接,所述活动夹板对称设置在固定块的内部,且活动夹板通过伸缩弹簧在固定块的内部构成左右移动结构。
6、与现有技术相比,本实用新型的有益效果是:该方便对螺套进行加持的螺套安装机器人:
7、(1)设置有第一驱动电机,第一驱动电机可以带动旋转柱在装置底座的上表面进行旋转,旋转柱外表面的转盘可以在电动伸缩杆的带动下沿着升降槽进行高度的调整,且转盘底面的滑动板可以在螺纹杆的带动下沿着限位滑槽进行位移,滑动板底面的三爪卡盘可以在第二驱动电机的带动下将螺套固定,从而使该装置可以固定不同尺寸的螺套零件,且可以自动循环完成螺套的安装,从而提高螺套安装的效率;
8、(2)设置有固定块,固定块的内部设置有活动夹板,活动夹板可以在伸缩弹簧的作用下在固定块的内部构成左右移动结构,从而使该装置可以固定不同尺寸的需要安装螺套的工件。
技术特征:
1.一种方便对螺套进行加持的螺套安装机器人,包括装置底座(1),其特征在于:所述装置底座(1)上表面的中间位置设置有固定块(15),所述固定块(15)的内部设置有活动夹板(16),所述活动夹板(16)的外表面与固定块(15)的内表面之间连接有伸缩弹簧(17)。
2.根据权利要求1所述的一种方便对螺套进行加持的螺套安装机器人,其特征在于:所述装置底座(1)的上表面开设有放置槽(2),所述放置槽(2)的内部设置有第一驱动电机(3),所述第一驱动电机(3)的上表面连接有旋转柱(4),所述旋转柱(4)的外表面开设有升降槽(5),所述升降槽(5)的内部设置有转盘(6),所述放置槽(2)对称开设在装置底座(1)的上表面,所述第一驱动电机(3)与放置槽(2)内部的底面之间为固定连接,所述旋转柱(4)与第一驱动电机(3)的顶端之间为固定连接,且旋转柱(4)通过第一驱动电机(3)在装置底座(1)的上表面构成旋转结构,所述升降槽(5)对称开设在旋转柱(4)的两侧,所述转盘(6)与旋转柱(4)的外表面之间为滑动连接。
3.根据权利要求2所述的一种方便对螺套进行加持的螺套安装机器人,其特征在于:所述旋转柱(4)外表面的顶端设置有固定盘(7),所述固定盘(7)的上表面设置有电动伸缩杆(8),且电动伸缩杆(8)的底部与转盘(6)的上表面相连接,所述转盘(6)的底面开设有限位滑槽(9),所述限位滑槽(9)的内部设置有螺纹杆(10),所述螺纹杆(10)的外表面设置有滑动板(11),且滑动板(11)的底部设置在限位滑槽(9)的内部,所述滑动板(11)的底面设置有三爪卡盘(12),所述三爪卡盘(12)的侧面设置有第二驱动电机(13),所述第二驱动电机(13)与三爪卡盘(12)之间连接有驱动杆(14),所述固定盘(7)与旋转柱(4)的外表面之间为固定连接,所述电动伸缩杆(8)对称设置在固定盘(7)的上表面,且电动伸缩杆(8)与固定盘(7)的上表面之间为固定连接,所述转盘(6)通过电动伸缩杆(8)在升降槽(5)的内部构成上下移动结构,所述限位滑槽(9)均匀开设在转盘(6)的底面,所述螺纹杆(10)与转盘(6)之间为轴承连接,且螺纹杆(10)与滑动板(11)之间为螺纹连接,所述滑动板(11)通过螺纹杆(10)在限位滑槽(9)的内部构成左右移动结构,所述三爪卡盘(12)与滑动板(11)的底面之间为固定连接,所述第二驱动电机(13)与滑动板(11)的底面之间为固定连接,且第二驱动电机(13)设置在三爪卡盘(12)的侧面,所述驱动杆(14)与第二驱动电机(13)之间为固定连接,且驱动杆(14)通过第二驱动电机(13)构成旋转结构,所述驱动杆(14)与三爪卡盘(12)之间为固定连接。
4.根据权利要求1所述的一种方便对螺套进行加持的螺套安装机器人,其特征在于:所述固定块(15)与装置底座(1)上表面的中间位置之间为固定连接,所述活动夹板(16)对称设置在固定块(15)的内部,且活动夹板(16)通过伸缩弹簧(17)在固定块(15)的内部构成左右移动结构。
技术总结
本技术公开了一种方便对螺套进行加持的螺套安装机器人,包括装置底座,所述装置底座上表面的中间位置设置有固定块,所述固定块的内部设置有活动夹板,所述活动夹板的外表面与固定块的内表面之间连接有伸缩弹簧。该方便对螺套进行加持的螺套安装机器人设置有第一驱动电机,第一驱动电机可以带动旋转柱在装置底座的上表面进行旋转,旋转柱外表面的转盘可以在电动伸缩杆的带动下沿着升降槽进行高度的调整,且转盘底面的滑动板可以在螺纹杆的带动下沿着限位滑槽进行位移,滑动板底面的三爪卡盘可以在第二驱动电机的带动下将螺套固定,从而使该装置可以固定不同尺寸的螺套零件,且可以自动循环完成螺套的安装。
技术研发人员:贺军可,吴显峰,李书义
受保护的技术使用者:丹阳市维友电子科技有限公司
技术研发日:20230216
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!