一种焊枪的动臂驱动连接机构的制作方法
本技术属于一种焊枪的动臂驱动连接机构,更具体地说,特别涉及焊枪的动臂驱动连接机构。
背景技术:
1、在焊装过程中,焊接质量以及焊接后的板件质量是很重要的。而在焊接过程中,焊枪作为直接提供焊接压力、电流的关键焊接设备,焊枪提供的焊接参数的准确性、稳定性与极限能力的表现,会直接影响焊点的质量。因此,焊枪本身的设备性能表现极其重要。
2、现有的焊枪动臂在使用的过程中一般通过多轴关节式机械臂驱动焊枪运动,保证机械臂末端焊枪所要求的位置、姿态和运动轨迹。然而多轴关节式机械臂体积大,结构复杂,在狭小空间进行焊接时,机械臂在运动过程中会撞击在需焊接的工件上,造成工件与设备的损伤,受作业空间受到局限,影响焊接质量。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供焊枪的动臂驱动连接机构,以期达到更具有更加实用价值性的目的。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了如下的技术方案:
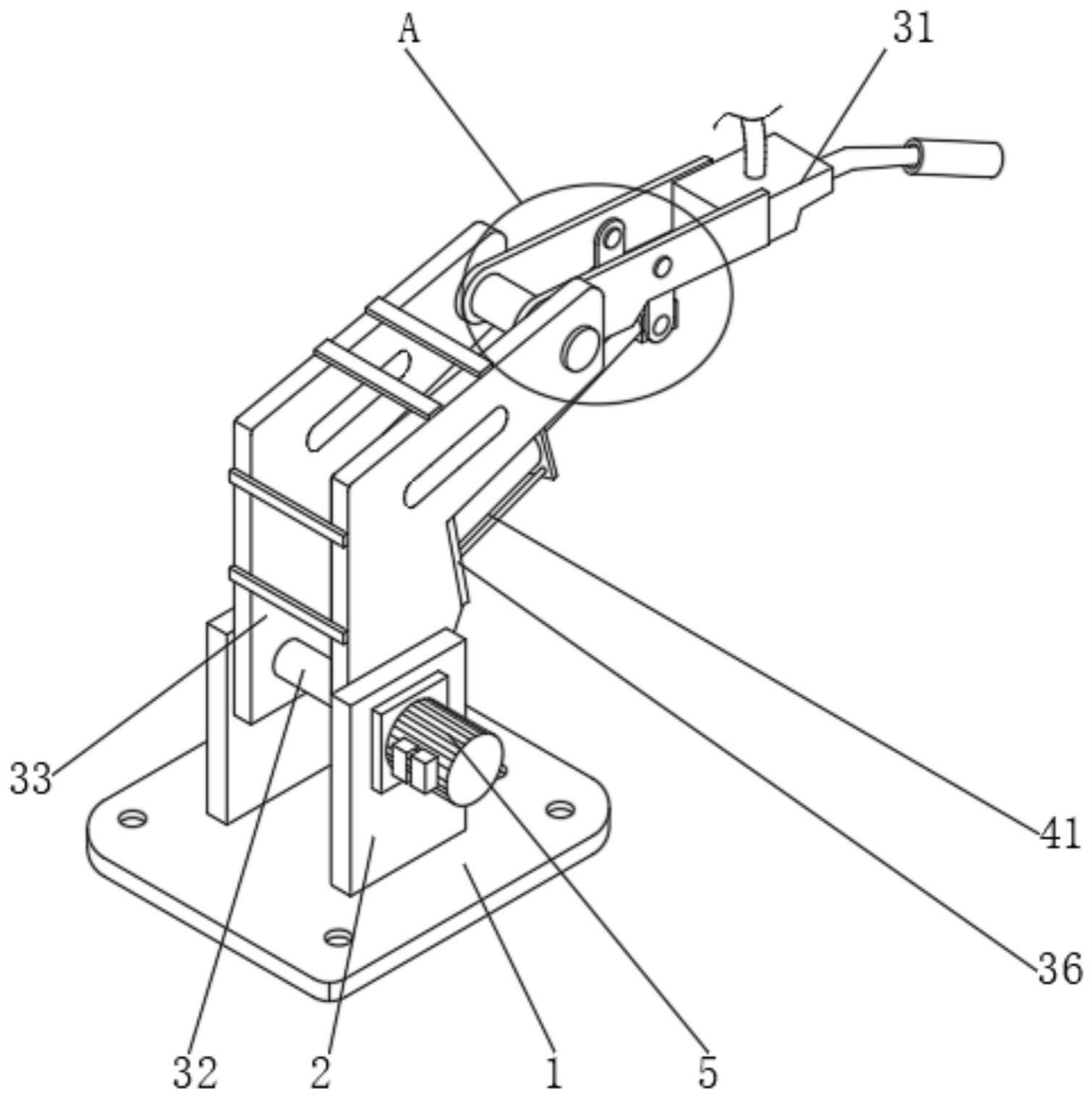
2、本实用新型焊枪的动臂驱动连接机构,包括底座,所述底座的顶部固定连接有两个安装板,两个所述安装板之间设置有连接机构,所述底座的顶部设置有摆动机构,所述连接机构包括转动杆,所述转动杆的外壁固定连接有两个主连接臂,两个所述主连接臂的另一端转动连接有转轴,所述转轴的外壁固定连接有两个副连接臂,两个所述副连接臂的另一端安装有焊枪。
3、作为本实用新型的一种优选技术方案,两个所述安装板的一侧安装有驱动电机。
4、作为本实用新型的一种优选技术方案,所述主连接臂之间固定连接有固定板。
5、作为本实用新型的一种优选技术方案,所述摆动机构包括电动伸缩杆,所述电动伸缩杆的输出端固定连接有连接块,所述连接块的两侧连接有第一摆动转轴,所述第一摆动转轴的另一端转动连接有转动块。
6、作为本实用新型的一种优选技术方案,所述转动块的另一端连接有第二摆动转轴。
7、作为本实用新型的一种优选技术方案,所述转动块设置有两个,且所述连接块位于两个转动块之间。
8、本实用新型的有益效果是:
9、通过操控驱动电机带动主连接臂进行转动调节使主连接臂达到合适角度,再通过设置操控电动伸缩杆,使电动伸缩杆带动连接块延伸,同时副连接臂也会在连接块延伸的过程中向外展开,再通过操控电动伸缩杆使副连接臂在第一摆动转轴、转动块、第二摆动转轴的作用下进行小范围的上下摆动,从而避免了动臂在狭小空间进行焊接过程中机械臂在需要小范围摆动时发生撞击导致工件与设备损坏,提高了焊接质量。
技术特征:
1.焊枪的动臂驱动连接机构,包括底座(1),其特征在于:所述底座(1)的顶部固定连接有两个安装板(2),两个所述安装板(2)之间设置有连接机构(3),所述底座(1)的顶部设置有摆动机构(4),所述连接机构(3)包括转动杆(32),所述转动杆(32)的外壁固定连接有两个主连接臂(33),两个所述主连接臂(33)的另一端转动连接有转轴(34),所述转轴(34)的外壁固定连接有两个副连接臂(35),两个所述副连接臂(35)的另一端安装有焊枪(31)。
2.如权利要求1所述焊枪的动臂驱动连接机构,其特征在于:两个所述安装板(2)的一侧安装有驱动电机(5)。
3.如权利要求1所述焊枪的动臂驱动连接机构,其特征在于:所述主连接臂(33)之间固定连接有固定板(36)。
4.如权利要求1所述焊枪的动臂驱动连接机构,其特征在于:所述摆动机构(4)包括电动伸缩杆(41),所述电动伸缩杆(41)的输出端固定连接有连接块(42),所述连接块(42)的两侧连接有第一摆动转轴(43),所述第一摆动转轴(43)的另一端转动连接有转动块(44)。
5.如权利要求4所述焊枪的动臂驱动连接机构,其特征在于:所述转动块(44)的另一端连接有第二摆动转轴(45)。
6.如权利要求4所述焊枪的动臂驱动连接机构,其特征在于:所述转动块(44)设置有两个,且所述连接块(42)位于两个转动块(44)之间。
技术总结
本技术提出了焊枪的动臂驱动连接机构,包括底座,所述底座的顶部固定连接有两个安装板,两个所述安装板之间设置有连接机构,所述底座的顶部设置有摆动机构,所述连接机构包括转动杆,所述转动杆的外壁固定连接有两个主连接臂,两个所述主连接臂的另一端转动连接有转轴,所述转轴的外壁固定连接有两个副连接臂,两个所述副连接臂的另一端安装有焊枪。该种焊枪的动臂驱动连接机构,通过操控电动伸缩杆使副连接臂在第一摆动转轴、转动块、第二摆动转轴的作用下进行小范围的上下摆动,从而避免了动臂在狭小空间进行焊接过程中机械臂在需要小范围摆动时发生撞击导致工件与设备损坏,提高了焊接质量。
技术研发人员:任钢,洪虎飞,张超,李斌
受保护的技术使用者:安徽诚诚机械有限公司
技术研发日:20230328
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!