一种旋转夹具的制作方法
本技术涉及自动化加工,具体为一种旋转夹具。
背景技术:
1、采用钻床或铣床对圆形零件、方形工件加工的过程中,需要采用旋转夹具对圆形零件、方形零件进行夹紧。
2、现有授权公告号为cn218194780u的中国专利公开了一种用于圆形零件加工的工装夹具,包括夹具板,夹具板上沿自身长度方向间隔设置有两个第一夹块,第一夹块沿着夹具板的长度方向移动,两个第一夹块的移动方向相反,两个第一夹块相对的一端均设置有“v”字形夹持块,“v”字形夹持块的v形开口远离第一夹块设置;夹具板上沿自身宽度方向间隔设置有两个第二夹块,第二夹块沿着夹具板的宽度方向移动,两个第二夹块的移动方向相反,两个第二夹块相对的一端均设置有抵接板,抵接板远离第二夹块的一端为矩形平面,两个第一夹块与两个第二夹块呈矩形排列。对圆形零件具有很好的夹持效果,有效防止加工过程中出现脱落的情况,并能进行定位夹持,提高了零件的加工精度。
3、但在实际应用中上述工装夹具还存在以下问题:圆形零件、方形零件在加工过程中往往需要换向加工,而上述方案中的工装夹具只能对圆形零件、方形零件进行夹紧,需要人工手动对圆形零件进行旋转换向,才能继续对圆形零件进行加工,旋转换向过程费时费力,手动旋转换向的换向精度还极低,降低了工件的加工效率和加工精度。
技术实现思路
1、本实用新型的目的在于针对上述的不足,提供一种旋转夹具,具有能根据预设固定角向进行自动旋转换向,旋转换向速度快,换向角度更精确,提高了工件的加工效率和加工精度的优点。
2、为了实现上述目的,本实用新型采用了如下技术方案:
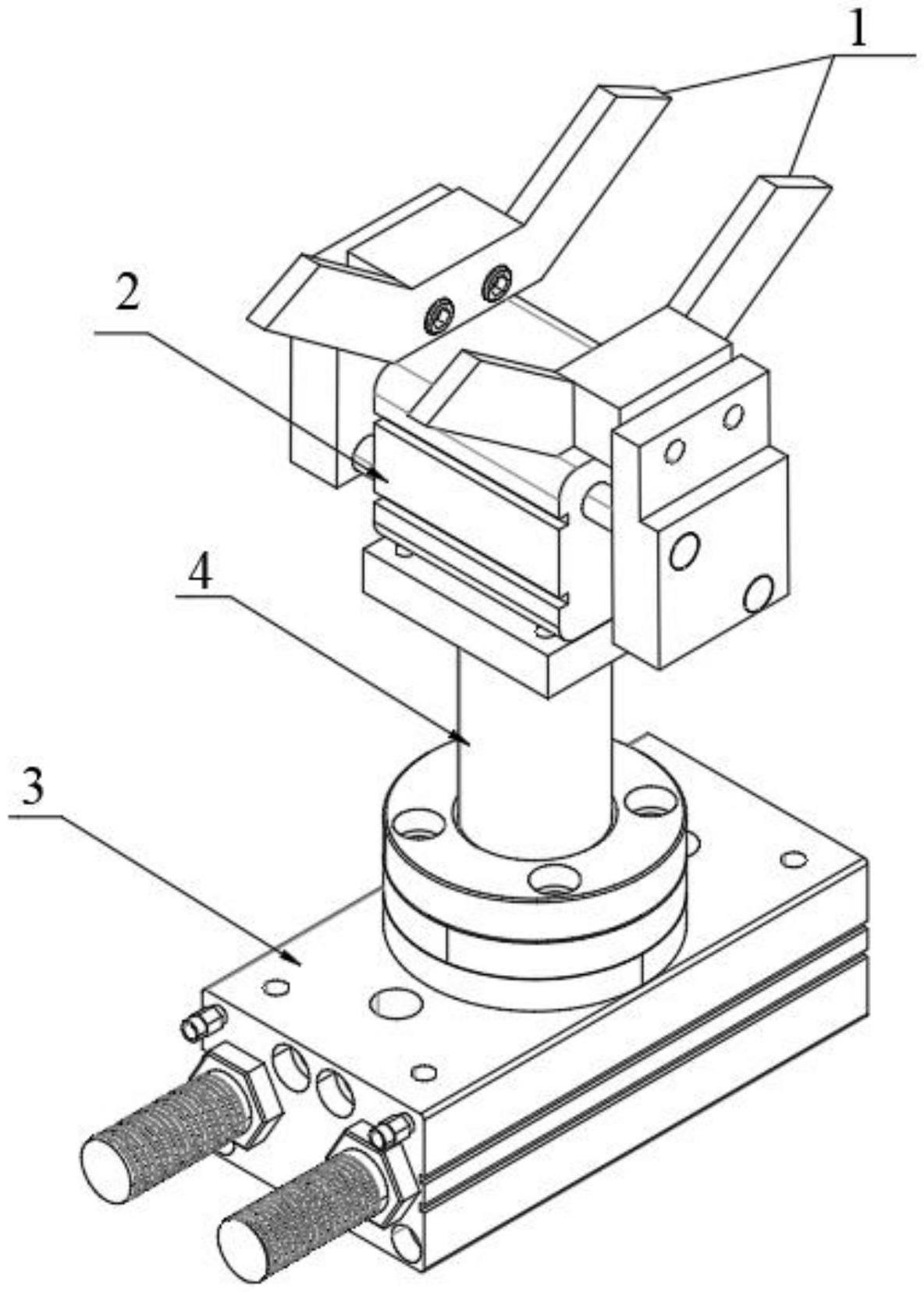
3、一种旋转夹具,包括正对设置的两块夹片,用于驱动两块所述夹片相互靠近或远离所采用的耦合气缸,设置于所述耦合气缸正下方的旋转气缸,用于连接所述耦合气缸和旋转气缸所采用的驱动杆,电性连接所述耦合气缸和旋转气缸的plc控制器。
4、进一步,所述旋转气缸的输出端驱动连接有驱动连接座,所述耦合气缸的底部设置有用于安装所述耦合气缸的固定座,所述驱动杆的顶端和底端分别固定连接所述固定座和驱动连接座。
5、进一步,所述耦合气缸为双活塞杆气缸,所述活塞杆的杆头上设置有夹紧连接座,所述夹片通过螺栓固定在所述夹紧连接座上。
6、进一步,所述夹片为v形夹片。
7、进一步,还包括用于安装所述旋转气缸所采用的底座,所述底座上设置有多个安装孔。
8、本实用新型的有益效果是:
9、实际应用中,使用时,将工件放到两片夹片之间,plc控制器通过控制耦合气缸驱动两片夹片相互靠近,将工件夹紧在两片夹片之间;将预设固定角向输入plc控制器,plc控制器通过控制旋转气缸驱动驱动杆带动耦合气缸旋转,给工件旋转换向;本实用新型具有能根据预设固定角向进行自动旋转换向,旋转换向速度快,换向角度更精确,提高了工件的加工效率和加工精度的优点。
技术特征:
1.一种旋转夹具,其特征在于:包括正对设置的两块夹片(1),用于驱动两块所述夹片(1)相互靠近或远离所采用的耦合气缸(2),设置于所述耦合气缸(2)正下方的旋转气缸(3),用于连接所述耦合气缸(2)和旋转气缸(3)所采用的驱动杆(4),电性连接所述耦合气缸(2)和旋转气缸(3)的plc控制器。
2.根据权利要求1所述的一种旋转夹具,其特征在于:所述旋转气缸(3)的输出端驱动连接有驱动连接座(31),所述耦合气缸(2)的底部设置有用于安装所述耦合气缸(2)的固定座(21),所述驱动杆(4)的顶端和底端分别固定连接所述固定座(21)和驱动连接座(31)。
3.根据权利要求1所述的一种旋转夹具,其特征在于:所述耦合气缸(2)为双活塞杆气缸,所述活塞杆的杆头上设置有夹紧连接座(22),所述夹片(1)通过螺栓固定在所述夹紧连接座(22)上。
4.根据权利要求1所述的一种旋转夹具,其特征在于:所述夹片(1)为v形夹片(1)。
5.根据权利要求1所述的一种旋转夹具,其特征在于:还包括用于安装所述旋转气缸(3)所采用的底座,所述底座上设置有多个安装孔。
技术总结
本技术涉及自动化加工技术领域,具体为一种旋转夹具,包括正对设置的两块夹片,用于驱动两块夹片相互靠近或远离所采用的耦合气缸,设置于所述耦合气缸正下方的旋转气缸,用于连接所述耦合气缸和旋转气缸所采用的驱动杆,电性连接所述耦合气缸和旋转气缸的PLC控制器;实际应用中,使用时,将工件放到两片夹片之间,PLC控制器通过控制耦合气缸驱动两片夹片相互靠近,将工件夹紧在两片夹片之间;将预设固定角向输入PLC控制器,PLC控制器通过控制旋转气缸驱动驱动杆带动耦合气缸旋转,给工件旋转换向;本技术具有能根据预设固定角向进行自动旋转换向,旋转换向速度快,换向角度更精确,提高了工件的加工效率和加工精度的优点。
技术研发人员:高峰,徐含轶,王婧鑫,李小青
受保护的技术使用者:上海汪青自动化科技有限公司
技术研发日:20230410
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!