一种机器人电弧增减材一体化制造装置的制作方法
本技术涉及电弧增减材制造,具体为一种机器人电弧增减材一体化制造装置。
背景技术:
1、增减材一体化制造是指利用数字化设计和先进制造技术,将增材制造和减材制造结合起来,实现一体化生产制造。增材制造是指通过将材料层层积累,逐渐构建一个三维模型的制造方式,通常采用的技术包括3d打印、激光烧结、电子束成形等。减材制造则是指从一块大型材料中通过加工去掉多余的部分,制造出所需的零件或产品的制造方式。
2、目前,根据公告号为cn217019362u的中国专利提出了一种机器人电弧增减材一体化制造装置,包括高效电弧增材制造机构、高速电主轴铣削机构和机器人变位机运动执行机构,所述高速电主轴铣削机构包括高速电主轴、刀柄快换装置和铣削控制装置,所述电主轴和焊枪之间通过安装夹具连接,本实用新型通过通过安装夹具将电主轴和焊枪与机器人摆臂固定,实现电弧增材制造系统与铣削系统共用,具有结构紧凑,占用空间小,运动灵活等特点,满足复杂构件增材制造的运动执行需求,且在固定时,仅需将插块插入导向槽内,旋转插块使得螺纹孔和导向槽沿轴线方向位置对应,通过螺栓便可以快速将安装夹具固定于机器人摆臂上,固定牢靠,操作简单,拆卸方便。
3、上述结构通过螺栓与螺纹孔之间的配合来安装夹具固定于机器人摆臂上,在此过程中,拧动螺栓需要耗费一定的时间,且螺栓拆装槽大致分为两类:一种是十字型凹槽,另一种是六角形凹槽,这两类螺栓拆装槽在长时间的使用过程中,容易出现边角磨损,从而增加了后续拆卸难度,以及维护时间。
技术实现思路
1、本实用新型的目的在于提供一种机器人电弧增减材一体化制造装置,解决了背景技术中现有的机器人电弧增减材一体化制造装置,通过螺栓与螺纹孔之间的配合来安装夹具固定于机器人摆臂上,在此过程中,拧动螺栓需要耗费一定的时间,且螺栓拆装槽大致分为两类:一种是十字型凹槽,另一种是六角形凹槽,这两类螺栓拆装槽在长时间的使用过程中,容易出现边角磨损,从而增加了后续拆卸难度,以及维护时间的问题。
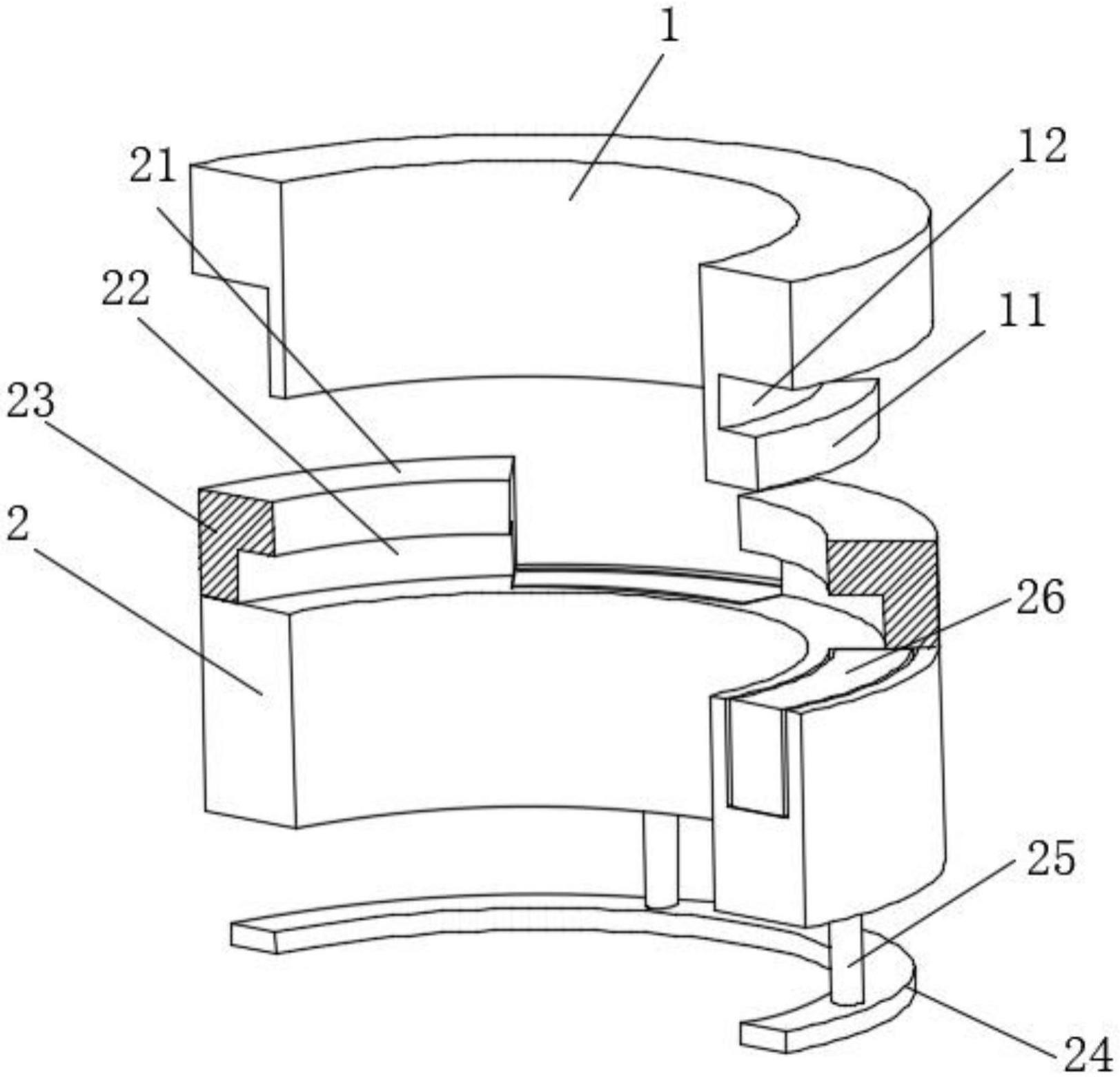
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人电弧增减材一体化制造装置,包括高效电弧增材制造机构,安装在所述高效电弧增材制造机构上端的运动执行机构和装配在所述运动执行机构一侧的高速电主轴铣削机构,以及固定在所述运动执行机构执行端的固定板,装配在所述固定板一端的对接座和卡合安装在对接座一端的连接环,所述连接环包括:
3、对接脚,固定安装在所述连接环一侧,且所述对接脚设置有四组。
4、对接座包括:
5、卡合块,安装于所述对接座一端,且所述卡合块安装有四组,所述卡合块与所述对接脚相匹配。
6、提拉环,装配于所述对接座一侧,且与所述运动执行机构有一定的间距。
7、连接杆,安装在所述提拉环一侧,且所述连接杆活动设置于所述对接座中;
8、限位块,固定安装在连接杆一端,其初始位置于两侧与所述磁铁片相贴合。
9、优选的,所述述对接脚外侧开设有环槽。
10、优选的,所述卡合块两侧装配有磁铁片。
11、优选的,所述卡合块内侧开设有卡槽,且所述卡槽与所述环槽相匹配。
12、与现有技术相比,本实用新型的有益效果如下:
13、本实用新型提供的一种机器人电弧增减材一体化制造装置,实现了将连接环与对接座相互对接的同时使得对接脚与卡合块两者相互朝反方向旋转,使得卡槽与环槽相互进行限位,随后推动提拉环使限位块将对接脚与卡合块限位,从而使得连接环与对接座实现了快速固定,减少了拧动螺栓将带有夹具的固定板固定于机器人摆臂上的时间,且避免长时间使用螺栓导致其上的凹槽受到磨损,降低了维护成本。
技术特征:
1.一种机器人电弧增减材一体化制造装置,包括高效电弧增材制造机构(6),安装在所述高效电弧增材制造机构(6)上端的运动执行机构(4)和装配在所述运动执行机构(4)一侧的高速电主轴铣削机构(5),以及固定在所述运动执行机构(4)执行端的固定板(3),装配在所述固定板(3)一端的对接座(2)和卡合安装在对接座(2)一端的连接环(1),其特征在于:所述连接环(1)包括:
2.根据权利要求1所述的一种机器人电弧增减材一体化制造装置,其特征在于:所述对接脚(11)外侧开设有环槽(12)。
3.根据权利要求1所述的一种机器人电弧增减材一体化制造装置,其特征在于:所述卡合块(21)两侧装配有磁铁片(23)。
4.根据权利要求3所述的一种机器人电弧增减材一体化制造装置,其特征在于:卡合块(21)内侧开设有卡槽(22),且所述卡槽(22)与环槽(12)相匹配。
技术总结
本技术公开了一种机器人电弧增减材一体化制造装置,涉及电弧增减材制造技术领域,本技术解决了机器人电弧增减材一体化制造装置,通过螺栓与螺纹孔之间的配合来安装夹具,而拧动螺栓需要耗费一定的时间,且螺栓拆装槽大致分为两类:一种是十字型凹槽,另一种是六角形凹槽,这两类螺栓拆装槽在长时间的使用过程中容易出现边角磨损,增加了后续拆卸难度的问题,本实用通过将连接环与对接座相互对接的同时使得对接脚与卡合块两者相互朝反方向旋转,使得卡槽与环槽相互进行限位,随后推动提拉环使限位块将对接脚与卡合块限位,完成了连接环与对接座快速固定,减少了安装时间,且避免长时间使用螺栓导致其上的凹槽受到磨损,降低了维护成本。
技术研发人员:宋心怡,刘祥宇,高飞
受保护的技术使用者:辽宁增材制造产业技术研究院有限公司
技术研发日:20230608
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!