自动上下料式焊机的制作方法
本技术涉及焊机领域,尤其是自动上下料式焊机。
背景技术:
1、工件在生产加工的时候,需要使用焊机对其进行焊接。但是现有的工件上下料,只能依靠人工搬运并放置到治具上进行定位。待工件焊接完毕之后,再由人工将工件移出到其他工位。这种操作方式需要耗费人力,且工作效率较低。
技术实现思路
1、本实用新型要解决的技术问题是:为了解决背景技术中描述的技术问题,本实用新型提供了一种自动上下料式焊机。通过调距机构来控制开合,调距机构配合工件拉紧机构来拉紧定位工件两端。通过水平移动台、升降台、抓取部转动机构和工件抓取部来将工件移入移出。本申请可以实现工件的自动上下料,提高了工作效率。
2、本实用新型解决其技术问题所采用的技术方案是:
3、一种自动上下料式焊机,包括多轴机械手、焊头,多轴机械手上安装有焊头,所述多轴机械手下方设有纵向平台和调距机构,调距机构穿过纵向平台,纵向平台上安装有水平移动台,水平移动台上安装有升降台,升降台上安装有抓取部转动机构,抓取部转动机构上安装有工件抓取部,调距机构上安装有两个用于拉住工件的工件拉紧机构。
4、具体地,所述工件拉紧机构由板体升降气缸、板体水平移动气缸、板体、销子、板体旋转部组成,板体升降气缸的活塞杆上固定有底座,板体水平移动气缸固定在底座(99)内,板体水平移动气缸的活塞杆上固定有板体旋转部,板体旋转部上安装有板体,板体上设有销子。
5、具体地,所述板体旋转部由机壳、齿轮、齿条、连接杆、单杆气缸组成,单杆气缸的缸体固定在机壳内,齿条滑配连接在机壳内,齿条连接在单杆气缸的活塞杆上,齿轮与齿条相啮合,齿轮转动连接在机壳上,齿轮固定在连接杆一端,连接杆另一端固定在板体上。
6、具体地,所述调距机构由缸体、同步轮、同步带、滑座、夹板、同步轮旋转电机组成,缸体上滑配连接有两个滑座,缸体内转动连接有两个同步轮,两个同步轮均啮合在同步带上,两个夹板分别固定在同步带的两侧,两个滑座分别固定在两个夹板上,同步轮旋转电机的输出轴固定在一个同步轮上,两个工件拉紧机构分别固定在两个滑座上。
7、具体地,所述水平移动台由水平直轨、滑块、水平直线模组、台体组成,水平直轨和水平直线模组的缸体均固定在纵向平台上,台体底部固定有滑块,台体固定在水平直线模组的滑座上,水平直轨与滑块相配合,升降台安装在台体上。
8、具体地,所述升降台由机台、机台升降气缸组成,机台升降气缸的活塞杆上固定有机台,机台的左右两端均安装有抓取部转动机构。
9、具体地,所述抓取部转动机构为旋转气缸,旋转气缸的输出轴上固定有工件抓取部。
10、具体地,所述工件抓取部为真空吸块,真空吸块与真空发生器相连。
11、具体地,所述机台上安装有光电传感器。
12、本实用新型的有益效果是:本实用新型提供了一种自动上下料式焊机。通过调距机构来控制开合,调距机构配合工件拉紧机构来拉紧定位工件两端。通过水平移动台、升降台、抓取部转动机构和工件抓取部来将工件移入移出。本申请可以实现工件的自动上下料,提高了工作效率。
技术特征:
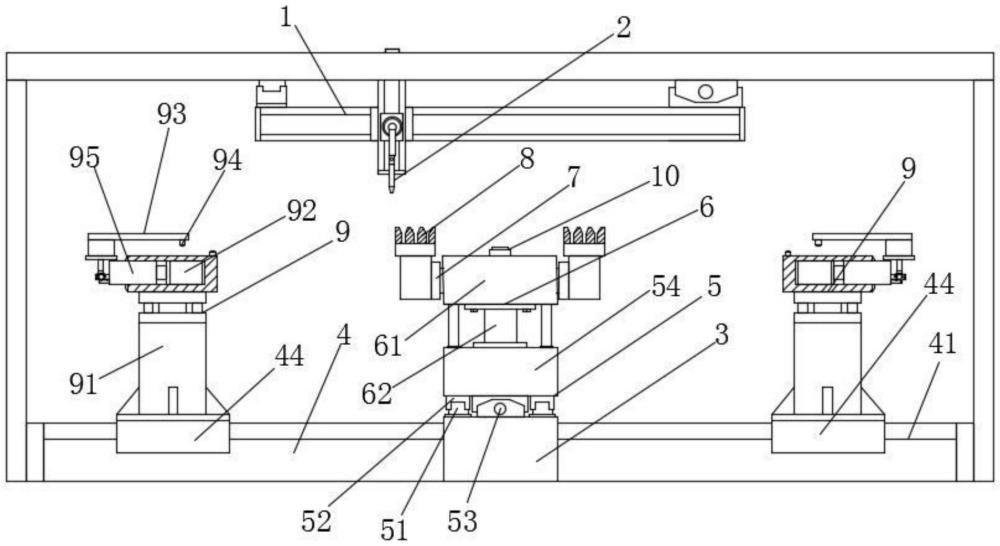
1.一种自动上下料式焊机,包括多轴机械手(1)、焊头(2),多轴机械手(1)上安装有焊头(2),其特征是,所述多轴机械手(1)下方设有纵向平台(3)和调距机构(4),调距机构(4)穿过纵向平台(3),纵向平台(3)上安装有水平移动台(5),水平移动台(5)上安装有升降台(6),升降台(6)上安装有抓取部转动机构(7),抓取部转动机构(7)上安装有工件抓取部(8),调距机构(4)上安装有两个用于拉住工件的工件拉紧机构(9)。
2.根据权利要求1所述的自动上下料式焊机,其特征在于:所述工件拉紧机构(9)由板体升降气缸(91)、板体水平移动气缸(92)、板体(93)、销子(94)、板体旋转部组成,板体升降气缸(91)的活塞杆上固定有底座(99),板体水平移动气缸(92)固定在底座(99)内,板体水平移动气缸(92)的活塞杆上固定有板体旋转部,板体旋转部上安装有板体(93),板体(93)上设有销子(94)。
3.根据权利要求2所述的自动上下料式焊机,其特征在于:所述板体旋转部由机壳(95)、齿轮(96)、齿条(97)、连接杆(98)、单杆气缸组成,单杆气缸的缸体固定在机壳(95)内,齿条(97)滑配连接在机壳(95)内,齿条(97)连接在单杆气缸的活塞杆上,齿轮(96)与齿条(97)相啮合,齿轮(96)转动连接在机壳(95)上,齿轮(96)固定在连接杆(98)一端,连接杆(98)另一端固定在板体(93)上。
4.根据权利要求1所述的自动上下料式焊机,其特征在于:所述调距机构(4)由缸体(41)、同步轮(42)、同步带(43)、滑座(44)、夹板(45)、同步轮旋转电机组成,缸体(41)上滑配连接有两个滑座(44),缸体(41)内转动连接有两个同步轮(42),两个同步轮(42)均啮合在同步带(43)上,两个夹板(45)分别固定在同步带(43)的两侧,两个滑座(44)分别固定在两个夹板(45)上,同步轮旋转电机的输出轴固定在一个同步轮(42)上,两个工件拉紧机构(9)分别固定在两个滑座(44)上。
5.根据权利要求1所述的自动上下料式焊机,其特征在于:所述水平移动台(5)由水平直轨(51)、滑块(52)、水平直线模组(53)、台体(54)组成,水平直轨(51)和水平直线模组(53)的缸体均固定在纵向平台(3)上,台体(54)底部固定有滑块(52),台体(54)固定在水平直线模组(53)的滑座上,水平直轨(51)与滑块(52)相配合,升降台(6)安装在台体(54)上。
6.根据权利要求1所述的自动上下料式焊机,其特征在于:所述升降台(6)由机台(61)、机台升降气缸(62)组成,机台升降气缸(62)的活塞杆上固定有机台(61),机台(61)的左右两端均安装有抓取部转动机构(7)。
7.根据权利要求1所述的自动上下料式焊机,其特征在于:所述抓取部转动机构(7)为旋转气缸,旋转气缸的输出轴上固定有工件抓取部(8)。
8.根据权利要求1所述的自动上下料式焊机,其特征在于:所述工件抓取部(8)为真空吸块,真空吸块与真空发生器相连。
9.根据权利要求6所述的自动上下料式焊机,其特征在于:所述机台(61)上安装有光电传感器(10)。
技术总结
本技术涉及焊机领域,尤其是自动上下料式焊机。该焊机包括多轴机械手、焊头,多轴机械手上安装有焊头,所述多轴机械手下方设有纵向平台和调距机构,调距机构穿过纵向平台,纵向平台上安装有水平移动台,水平移动台上安装有升降台,升降台上安装有抓取部转动机构,抓取部转动机构上安装有工件抓取部,调距机构上安装有两个用于拉住工件的工件拉紧机构。本技术通过调距机构来控制开合,调距机构配合工件拉紧机构来拉紧定位工件两端。通过水平移动台、升降台、抓取部转动机构和工件抓取部来将工件移入移出。本申请可以实现工件的自动上下料,提高了工作效率。
技术研发人员:冷留福
受保护的技术使用者:常州天利智能控制股份有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!