新能源模组上盖自动铆接机器人夹具的制作方法
本申请涉及工装夹具的,具体涉及一种新能源模组上盖自动铆接机器人夹具。
背景技术:
1、新能源pack包是新能源汽车行业最常用的动力模块,其中,新能源模组是pack包中最核心的组成部分。目前,新能源模组在上盖铆接工位操作时,通常采用手动或者半自动的方式,并且用于装夹新能源模组上盖的工装夹具通常只适配一种型号,普遍存在兼容性差及装夹效率低等情况。
2、因此,需要一种新的新能源模组上盖工装夹具,能够具有更好的兼容性及装夹效率,且能够实现新能源模组上盖和新能源模组的自动铆接。
技术实现思路
1、有鉴于此,本说明书实施例提供一种新能源模组上盖自动铆接机器人夹具,能够适配不同型号的新能源模组上盖,具有更好的兼容性和装夹效率,并且能够实现新能源模组上盖和新能源模组的自动铆接。
2、本说明书实施例提供以下技术方案:
3、本说明书实施例提供一种新能源模组上盖自动铆接机器人夹具,包括夹具框架,所述夹具框架上设置有模组上盖上料工装、铆接工装、安装于夹具框架上的伺服模组变距系统、真空系统及视觉系统;
4、所述模组上盖上料工装包括若干个第一真空吸附件,若干个所述第一真空吸附件安装于夹具框架上,且每个所述第一真空吸附件的位置均相对夹具框架可调;
5、所述真空系统包括第一真空子系统和第二真空子系统;
6、若干个所述第一真空吸附件均与第一真空子真空系统连接,在第一真空子系统的作用下对新能源模组上盖进行吸附;
7、所述铆接工装包括若干铆接驱动件及安装于铆接驱动件上的第二真空吸附件,若干所述铆接驱动件安装于伺服模组变距系统上,并在所述伺服模组变距系统的作用下相对夹具框架可调;
8、若干所述第二真空吸附件均与第二真空子系统连接,在第二真空子系统的作用下对铆钉进行吸附;
9、所述铆接驱动件用于驱动第二真空吸附件位移,以使得第二真空吸附件吸附的铆钉执行铆接动作;
10、所述夹具框架用于连接机器人,所述视觉系统通过定位寻址指引机器人带动夹具框架移动,以完成所述模组上盖上料工装夹持的新能源模组上盖与铆接工位上的新能源模组的配对及铆接工装夹持的铆钉与新能源模组上盖的铆接点配对。
11、通过上述技术方案,设置模组上盖上料工装、铆接工装、伺服模组变距系统、真空系统及视觉系统,一方面,针对于不同型号的新能源模组上盖,可以通过调节第一真空吸附件的位置,以提高对不同型号新能源模组上盖的适配性,具有更好的兼容性;另一方面,铆接工装中用于吸附铆钉的若干第二真空吸附件及铆接驱动件均可通过伺服模组变距系统相对夹具框架可调,并且能够在机器人的作用下进行更多自由度的活动,配合视觉系统,可以实现新能源模组上盖和新能源模组的自动铆接。
12、优选的,所述夹具框架上安装有减压阀;
13、所述铆接驱动件为驱动气缸;
14、所述铆接驱动件与减压阀连接,通过减压阀监控和调节铆接驱动件的输出力。
15、优选的,所述减压阀连接有正压表,所述正压表用于传输信号以使所述减压阀对铆接驱动件的输出力进行监控和调节。
16、优选的,所述夹具框架上安装有阀组,所述阀组与铆接驱动件连接,用于控制铆接驱动件气路的通断。
17、优选的,所述夹具框架上安装有激光测距仪,所述激光测距仪用于检测模组上盖上料工装相对上盖上料工位的距离、铆接工装相对铆钉上料工位的距离、模组上盖上料工装和铆接工装相对铆接工位的距离。
18、优选的,所述铆接工装还包括若干连接底座;
19、若干所述铆接驱动件均匀分成若干组,分别安装在若干所述连接底座上;
20、所述伺服模组变距系统为直线模组,若干连接底座分别安装于所述直线模组的若干滑台上。
21、优选的,所述第一真空子系统和第二真空子系统均包括电磁阀、真空发生器和负压表;
22、所述电磁阀用于电控通/断气和吹气;
23、所述第一真空子系统的负压表和第二真空子系统的负压表分别用于对模组上盖上料工装夹持的新能源模组上盖和铆接工装夹持的铆钉进行在位检测。
24、优选的,所述视觉系统还用于检测新能源模组上盖和新能源模组的铆接情况。
25、优选的,所述夹具框架包括依次搭接的第一横梁、第一竖梁、第二横梁及第二竖梁;
26、若干所述第一真空吸附件分别安装于第一横梁及第二横梁上,且第一真空吸附件与第一横梁及第二横梁之间的安装通过钣金件作为载体。
27、优选的,所述第一横梁和第二横梁之间还设有安装座,所述安装座上设有连接法兰,所述连接法兰用于实现夹具框架与机器人的连接。
28、与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:
29、1、通过设置第一真空吸附件和第二真空吸附件分别吸附新能源模组上盖和铆钉,提高新能源模组上盖和铆钉相对于工装的装夹效率;
30、2、通过设置第一真空吸附件相对夹具框架可调,使得整体工装能够适配不同型号的新能源模组上盖,兼容性更好;
31、3、通过设置夹具框架与机器人连接,且第二真空吸附件及铆接驱动件均通过伺服模组变距系统可调,使得被吸附的铆钉可以针对新能源模组上盖上不同的铆接位置并完成铆接,完成新能源模组上盖和新能源模组之间的自动铆接。
技术特征:
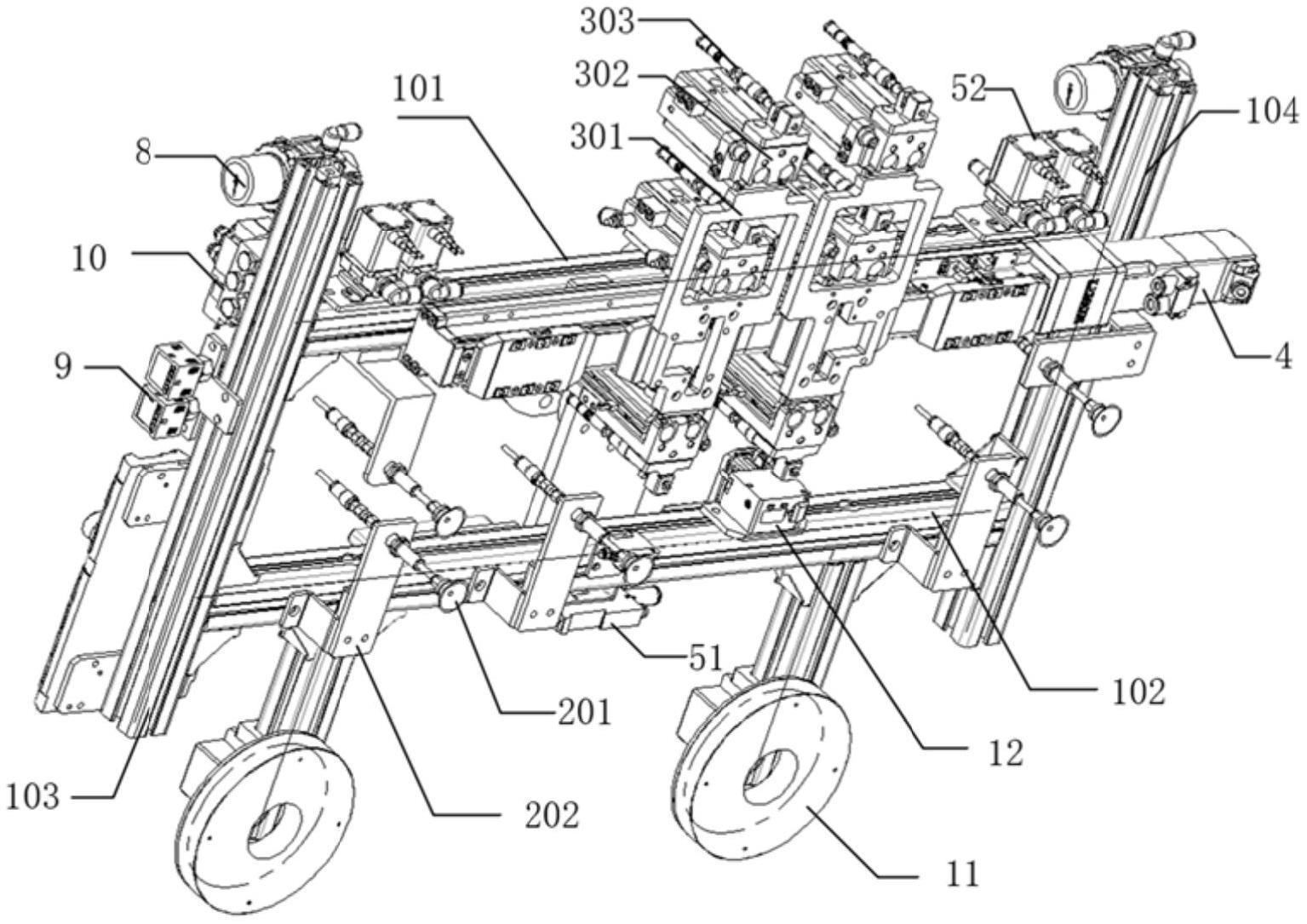
1.一种新能源模组上盖自动铆接机器人夹具,其特征在于,包括夹具框架(1),所述夹具框架(1)上设置有模组上盖上料工装(2)、铆接工装(3)、安装于夹具框架(1)上的伺服模组变距系统(4)、真空系统(5)及视觉系统(11);
2.根据权利要求1所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述夹具框架(1)上安装有减压阀(8);
3.根据权利要求2所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述减压阀(8)连接有正压表(9),所述正压表(9)用于传输信号,以使所述减压阀(8)对铆接驱动件(302)的输出力进行监控和调节。
4.根据权利要求2所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述夹具框架(1)上安装有阀组(10);
5.根据权利要求1所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述夹具框架(1)上安装有激光测距仪(12),所述激光测距仪(12)用于检测模组上盖上料工装(2)相对上盖上料工位的距离、铆接工装(3)相对铆钉上料工位的距离、模组上盖上料工装(2)和铆接工装(3)相对铆接工位的距离。
6.根据权利要求1所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述铆接工装(3)还包括若干连接底座(301);
7.根据权利要求1所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述第一真空子系统(51)和第二真空子系统(52)均包括电磁阀、真空发生器和负压表;
8.根据权利要求1所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述视觉系统(11)还用于检测新能源模组上盖和新能源模组的铆接情况。
9.根据权利要求1-8中任一所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述夹具框架(1)包括依次搭接的第一横梁(101)、第一竖梁(103)、第二横梁(102)及第二竖梁(104);
10.根据权利要求9所述的新能源模组上盖自动铆接机器人夹具,其特征在于,所述第一横梁(101)和第二横梁(102)之间还设有安装座(6),所述安装座(6)上设有连接法兰(7),所述连接法兰(7)用于实现夹具框架(1)与机器人的连接。
技术总结
本申请提供一种新能源模组上盖自动铆接机器人夹具,涉及工装夹具的技术领域,其包括夹具框架,夹具框架上设有模组上盖上料工装、铆接工装、伺服模组变距系统、真空系统及视觉系统;模组上盖上料工装包括若干第一真空吸附件,第一真空吸附件相对夹具框架可调;第一真空吸附件用于对新能源模组上盖进行吸附;铆接工装包括若干铆接驱动件及第二真空吸附件,铆接驱动件相对夹具框架可调;第二真空吸附件用于对铆钉进行吸附;夹具框架连接机器人,在机器人的带动下,配合视觉系统,完成物料配对及铆接配对,能够适配不同型号的新能源模组上盖,且具有更好的兼容性和装夹效率,能够实现新能源模组上盖和新能源模组的自动铆接。
技术研发人员:李亚洲,黑志宝,李雪建,陈辰
受保护的技术使用者:昂华(上海)自动化工程股份有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!