一种腕臂生产用气动定位夹具的制作方法
本技术属于铝腕臂生产设备领域,尤其是涉及一种定位夹具。
背景技术:
1、高铁接触网腕臂零件安装在支柱上部,用于支持接触悬挂,并起传递负荷的作用,一般使用圆形管件制成,上面套有若干零件,腕臂长度与接触悬挂的结构高度、支柱侧面限界、支柱所在位置等因素有关,不同的腕臂的长度,其上的装配零件也不尽相同。通常利用锯切机等工具将腕臂切割成固定的长度,在切割过程中需要固定腕臂,但现有技术常利用一些简单的固定工装人工地固定腕臂,其每次的固定长度参差不一,导致锯切过后的腕臂长度不一,难以保证成品质量,同时该腕臂的固定过程比较冗长,影响腕臂的生产效率。
技术实现思路
1、有鉴于此,本实用新型旨在提出一种腕臂生产用气动定位夹具,以定位固定腕臂的长度,提高腕臂的生产效率。
2、为达到上述目的,本实用新型的技术方案是这样实现的:
3、一种腕臂生产用气动定位夹具。
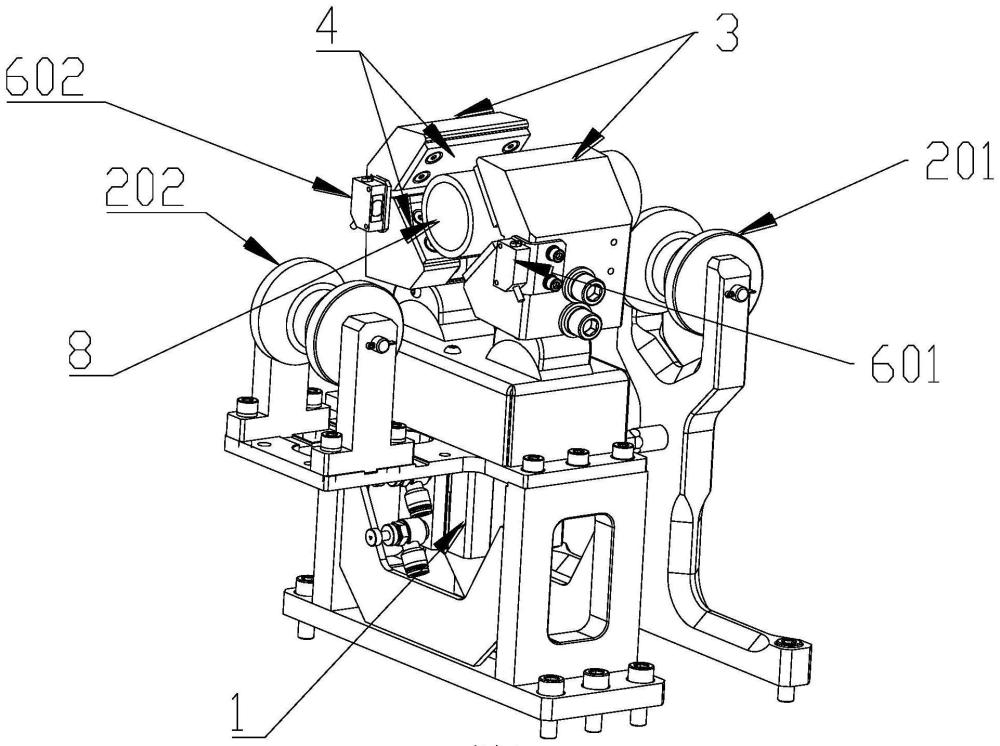
4、进一步的,包括第一导轮、第二导轮、夹爪、气缸、对射光电传感器、传动组件;第一导轮和第二导轮分别位于限位夹具两侧,用于承载并导向腕臂;夹爪位于限位夹具上半部分,气缸固定在限位夹具下半部分;对射光电传感器固定安装在夹爪侧面,用于定位腕臂的长度信息;传动组件位于夹爪的下方,传动组件也位于气缸的上方,并且传动组件与夹爪、气缸固定连接,用于传递气缸的动力以控制夹爪进行夹持/松开的动作。
5、进一步的,所述夹爪由两个v型夹持块构成,v型夹持块内侧呈v型缺口,v型缺口安装有聚氨酯垫板;两个v型夹持块以v型缺口的一侧相对称安装。
6、进一步的,还包括多种不同尺寸v型缺口的v型夹持块,用于兼容多种不同直径的腕臂。
7、进一步的,传动组件包括伸缩轴、连接头、连杆、转动块;伸缩轴的下端与所述气缸的输出端滑动连接,伸缩轴的上端与连接头固定连接;连接头的两端都安装有可转动的连杆,连杆与转动块转动连接,转动块与v型夹持块固定连接;气缸联动伸缩轴进行竖向伸缩运动,连接头跟随伸缩轴进行竖向运动,在连杆的作用下带动转动块进行横向转动,实现两个v型夹持块同步进行闭合\捭开运动。
8、进一步的,所述对射光电传感器由发射端和接收端组成,发射端和接收端分别固定安装在所述两个v型夹持块侧面;发射端与接受端的安装角度相同,所述夹爪处于夹持时,发射端的射光刚好被接受端接受。
9、进一步的,所述发射端与接受端的安装角度可人工调节,用于控制所述夹爪在夹持时的闭合角度。
10、进一步的,所述第一导轮与所述第二导轮平行,并与所述夹爪的夹持部位在水平面上共线,用于所述对射光电传感器判断腕臂到位情况。
11、进一步的,还包括控制器,控制器连接气缸和对射光电传感器,用于控制气缸启动\停止。
12、相对于现有技术,本实用新型所述的一种腕臂生产用气动定位夹具具有以下有益效果:
13、(1)本实用新型所述的一种腕臂生产用气动定位夹具,传感器作为电动夹持腕臂的反馈部件,大大地提高了腕臂定位长度的精准性和高效性,同时提高腕臂的整体生产效率;
14、(2)本实用新型所述的一种腕臂生产用气动定位夹具,在连杆的作用下带动转动块进行横向转动,以此实现两个v型夹持块同步地进行闭合\捭开运动,提高腕臂定位的精准度;
15、(3)本实用新型所述的一种腕臂生产用气动定位夹具,聚氨酯垫板具有良好的弹性以降低腕臂的管壁在被夹持限位时受到的压力;
16、(4)本实用新型所述的一种腕臂生产用气动定位夹具,配置有多种不同尺寸v型缺口的v型夹持块,用于兼容多种不同直径的腕臂。
技术特征:
1.一种腕臂生产用气动定位夹具,其特征在于:包括第一导轮(201)、第二导轮(202)、夹爪、气缸(1)、对射光电传感器、传动组件;
2.根据权利要求1所述的一种腕臂生产用气动定位夹具,其特征在于:所述夹爪由两个v型夹持块(3)构成,v型夹持块(3)内侧呈v型缺口,v型缺口安装有聚氨酯垫板(4);
3.根据权利要求2所述的一种腕臂生产用气动定位夹具,其特征在于:还包括多种不同尺寸v型缺口的v型夹持块(3),用于兼容多种不同直径的腕臂(8)。
4.根据权利要求1所述的一种腕臂生产用气动定位夹具,其特征在于:传动组件包括伸缩轴(501)、连接头(502)、连杆(503)、转动块(504);
5.根据权利要求4所述的一种腕臂生产用气动定位夹具,其特征在于:所述对射光电传感器由发射端(601)和接收端(602)组成,发射端(601)和接收端(602)分别固定安装在所述两个v型夹持块(3)侧面;
6.根据权利要求1所述的一种腕臂生产用气动定位夹具,其特征在于:所述第一导轮(201)与所述第二导轮(202)平行,并与所述夹爪的夹持部位在水平面上共线,用于所述对射光电传感器判断腕臂(8)到位情况。
7.根据权利要求1-6任一项所述的一种腕臂生产用气动定位夹具,其特征在于:还包括控制器,控制器连接气缸(1)和对射光电传感器,用于控制气缸(1)启动\停止。
技术总结
本技术提供了一种腕臂生产用气动定位夹具,包括第一导轮、第二导轮、夹爪、气缸、对射光电传感器、传动组件;第一导轮和第二导轮分别位于限位夹具两侧,用于承载并导向腕臂;夹爪位于限位夹具上半部分,气缸固定在限位夹具下半部分;对射光电传感器固定安装在夹爪侧面,用于定位腕臂的长度信息;传动组件位于夹爪的下方,传动组件也位于气缸的上方,并且传动组件与夹爪、气缸固定连接,用于传递气缸的动力以控制夹爪进行夹持/松开的动作。本技术有益效果:以定位固定腕臂的长度,提高腕臂的生产效率。
技术研发人员:古晓东,郭雅婕,罗健,孟庆斌,苑玉超,魏建忠,王圣昆,王敬磊,李国胜,方宝林,张德玉,唐守乾,晋壮壮,王溢斐,张曼华,王双双,李佳骏,周煜凯,周伟,梁峰科,孟令昆,李先炎,鲁海峰,桂磊
受保护的技术使用者:铁设(济南)电气设备有限公司
技术研发日:20230627
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!