一种焊接机器人焊丝送料结构的制作方法
本技术涉及焊丝送料,更具体地涉及一种焊接机器人焊丝送料结构。
背景技术:
1、焊丝是作为填充金属或同时作为导电用的金属丝焊接材料,而焊接机器人是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂;而在机器人焊接时,需要将焊枪对准管材缝隙处,并用焊丝对其填充,而焊丝焊接机器人中设置有自动化的送丝系统,包括了送丝软管、盘状焊丝、送丝机构等,通过配置将焊丝送至指定位置,当焊枪进行焊接的时候,需要对焊丝进行消耗,传感器会将焊接信息传递到自动送丝系统,完成自动送丝过程,但是其送丝机构一般离焊枪较远,且其固定移动焊丝尺寸固定,无法对不同尺寸大小的焊丝进行固定送丝。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供了一种焊接机器人焊丝送料结构,以解决上述背景技术中存在的问题。
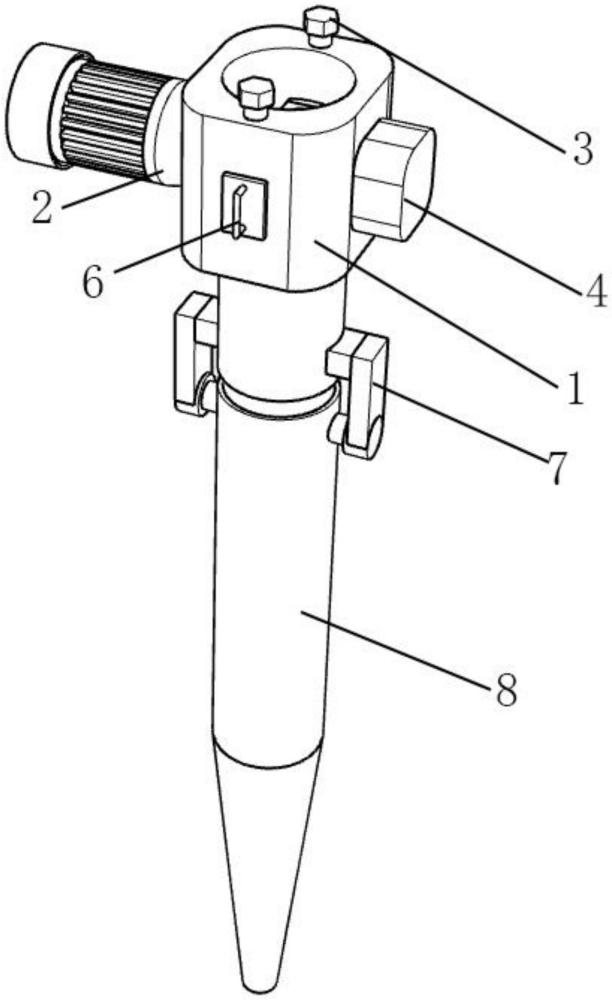
2、本实用新型提供如下技术方案:一种焊接机器人焊丝送料结构,包括连接板,所述连接板的内部两侧活动卡接有外固定板,所述外固定板的外侧固定安装有拉手,所述连接板的内部活动安装有连接转轴,所述连接转轴的外侧固定安装有转动环,所述连接板的顶部活动安装有位于所述外固定板正上方的固定螺栓,通过拉手拉动外固定板,从而将焊丝固定在外固定板、转动环之间,并通过固定螺栓将外固定板固定在连接板的内部,进而可将不同尺寸大小的焊丝进行固定,并将其送丝焊接,从而增加了工作人员的舒适度;
3、进一步的,所述转动环的内部环绕固定安装有卡板,通过卡板可与外固定板卡接,从而将焊丝固定并将焊丝送至送丝管,从而使自动送丝焊接。
4、进一步的,所述卡板的顶部均匀开设有卡槽,通过卡槽增加了卡板与焊丝之间的摩擦力,从而使卡板与外固定板固定焊丝更加紧密牢固。
5、进一步的,所述外固定板的一端的尺寸大小与所述转动环内部圆槽的尺寸大小相适配,所述卡板的高度为所述转动环内圆槽深度的一半,使得卡板可与外固定板之间可以固定更小尺寸大小的焊丝,从而增加了装置的适用范围。
6、进一步的,所述连接板的一侧固定安装有电机,所述连接板的另一侧固定安装有送丝感应器,所述连接板的底部固定安装有角度调节转轴,所述角度调节转轴的一端活动安装有送丝管,通过电机依次带动连接转轴、转动环转动,并通过送丝感应器与焊枪的控制系统相连,从而启动电机使转动环转动自动送丝。
7、与现有技术相比,本实用新型的有益效果是通过拉动拉手从而带动外固定板在连接板内移动,接着将焊丝固定在外固定板、转动环之间,并通过固定螺栓将外固定板固定在连接板的内部,进而可将不同尺寸大小的焊丝进行固定,并将其送丝焊接,从而增加了工作人员的舒适度,同时卡板顶部开设的卡槽增加了卡板与焊丝之间的摩擦力,从而使卡板与外固定板固定的焊丝更加紧密牢固,便于启动电机使其自动送丝。
技术特征:
1.一种焊接机器人焊丝送料结构,包括连接板(1),其特征在于:所述连接板(1)的内部两侧活动卡接有外固定板(5),所述外固定板(5)的外侧固定安装有拉手(6),所述连接板(1)的内部活动安装有连接转轴(9),所述连接转轴(9)的外侧固定安装有转动环(10),所述连接板(1)的顶部活动安装有位于所述外固定板(5)正上方的固定螺栓(3)。
2.根据权利要求1所述的一种焊接机器人焊丝送料结构,其特征在于:所述转动环(10)的内部环绕固定安装有卡板(11)。
3.根据权利要求2所述的一种焊接机器人焊丝送料结构,其特征在于:所述卡板(11)的顶部均匀开设有卡槽(12)。
4.根据权利要求2所述的一种焊接机器人焊丝送料结构,其特征在于:所述外固定板(5)的一端的尺寸大小与所述转动环(10)内部圆槽的尺寸大小相适配,所述卡板(11)的高度为所述转动环(10)内圆槽深度的一半。
5.根据权利要求1所述的一种焊接机器人焊丝送料结构,其特征在于:所述连接板(1)的一侧固定安装有电机(2),所述连接板(1)的另一侧固定安装有送丝感应器(4),所述连接板(1)的底部固定安装有角度调节转轴(7),所述角度调节转轴(7)的一端活动安装有送丝管(8)。
技术总结
本技术涉及焊丝送料技术领域,且公开了一种焊接机器人焊丝送料结构,包括连接板,所述连接板的内部两侧活动卡接有外固定板,所述外固定板的外侧固定安装有拉手,所述连接板的内部活动安装有连接转轴,所述连接转轴的外侧固定安装有转动环,所述连接板的顶部活动安装有位于所述外固定板正上方的固定螺栓,本技术的有益效果是通过拉动拉手从而带动外固定板在连接板内移动,接着将焊丝固定在外固定板、转动环之间,并通过固定螺栓将外固定板固定在连接板的内部,进而可将不同尺寸大小的焊丝进行固定,并将其送丝焊接,从而增加了工作人员的舒适度,同时卡板顶部开设的卡槽增加了卡板与焊丝之间的摩擦力。
技术研发人员:程胜昔
受保护的技术使用者:吉林艾森迪机器人技术股份有限公司
技术研发日:20230714
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!