一种焊接机器人移动平台的制作方法
本技术涉及焊接机器人,具体为一种焊接机器人移动平台。
背景技术:
1、焊接机器人是从事焊接(包括切割与喷涂)的工业机器人,为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器,焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂,焊接机器人因其高效性在先进制造业中应用广泛,尤其在钣金件、结构件、设备型、异型锅炉(圆弧、曲线焊接)等焊接场景中,有着较大的应用市场,一般对于大型工件,焊接机器人因臂展有限难以在一个工位完成焊接任务,一般配合移动式平台使用,使得机器人可在多工位进行焊接作业,当前的焊接机器人移动平台一般包括支撑机构、导轨、移动机构、安装座、驱动机构和限位机构,给焊接机器人的移动焊接操作带来了很大的便利。但是,现有的焊接机器人移动平台在使用过程中发现,其不便于对线缆及导轨进行保护,容易导致焊渣和粉尘损伤线缆和导轨,严重影响线缆和导轨的使用寿命,不利于焊接机器人的平稳移动,给机器人的焊接操作带来了很多麻烦。
技术实现思路
1、针对以上问题,本实用新型的目的在于:提供一种焊接机器人移动平台,解决上述背景技术中提出的问题。
2、为实现以上目的,本实用新型采用的技术方案:一种焊接机器人移动平台,包括多个底板,多个所述底板的顶部固定安装有两个导轨,多个所述底板的顶部固定安装有两个拖链支板,两个所述导轨均位于两个拖链支板之间,两个所述导轨的上方设有同一个滑板,所述滑板的底部设有多个滚轮,所述滚轮与对应的导轨滚动连接,所述滑板的顶部固定安装有安装座,所述安装座的顶部固定安装有焊接机器人主体,所述滑板的顶部固定安装有控制组件和驱动电机,所述焊接机器人主体和驱动电机均通过导线与控制组件电性连接并形成闭合回路,所述拖链支板上设有拖链,所述滑板的顶部固定安装有两个拖链支架,所述拖链靠近安装座的一端固定安装在对应的拖链支架上,所述底板的顶部固定安装有光电检测组件,所述光电检测组件与滑板相适配,多个所述底板的顶部固定安装有同一个齿条,所述齿条位于两个导轨之间,所述驱动电机的输出轴上固定安装有第一锥齿轮,所述滑板上转动贯穿有转轴,所述转轴的顶端和底端分别固定安装有第二锥齿轮和齿轮,所述第一锥齿轮和第二锥齿轮啮合,所述齿轮和齿条啮合。
3、为了防止焊渣和灰尘损伤线缆和导轨:
4、作为上述技术方案的进一步改进:两个所述拖链支板还包括折叠遮罩,所述折叠遮罩滑动套设在两个拖链支板上,所述滑板和远离滑板的底板的顶部均固定安装有两个固定板,所述折叠遮罩的两端分别固定安装在对应的两个固定板上。
5、本改进的有益效果为:通过这样设置,从而能够实现对线缆和导轨的有效遮挡保护,能够防止焊渣和灰尘损伤线缆和导轨。
6、为了防止滑板脱离导轨:
7、作为上述技术方案的进一步改进:位于两端的两个所述底板的顶部均固定安装有两个限位板,所述限位板与滑板相适配。
8、本改进的有益效果为:通过设置限位板,从而能够对滑板进行限位,防止滑板脱离导轨。
9、为了使转轴转动更加稳定:
10、作为上述技术方案的进一步改进:所述滑板上开设有矩形凹槽,所述矩形凹槽的底部内壁上贯穿有圆形通孔,所述圆形通孔内内固定安装有转动座,所述转轴转动贯穿转动座。
11、本改进的有益效果为:通过设置矩形凹槽、圆形通孔和转动座,从而便于对转轴进行支撑和限位,使转轴转动更加稳定。
12、为了便于对齿条进行固定:
13、作为上述技术方案的进一步改进:多个所述底板的顶部均固定安装有支撑架,所述齿条固定安装在多个支撑架的顶部。
14、本改进的有益效果为:通过设置支撑架,从而便于对齿条进行固定。
15、为了便于对光电检测组件进行控制和收集信号:
16、作为上述技术方案的进一步改进:所述光电检测组件通过导线与控制组件电性连接并形成闭合回路。
17、本改进的有益效果为:通过这样设置,从而便于对光电检测组件进行控制和收集信号。
18、为了便于对光电感应组件进行有效固定:
19、作为上述技术方案的进一步改进:所述底板的顶部固定安装有l形弯板,所述光电检测组件固定安装在对应的l形弯板上。
20、本改进的有益效果为:通过设置l形弯板,从而便于对光电感应组件进行有效固定。
21、本实用新型的有益效果为:通过简单的遮挡结构,从而能够实现对线缆和导轨的有效遮挡保护,能够防止焊渣和灰尘损伤线缆和导轨,有利于焊接机器人的平稳移动,方便焊接机器人进行不同位置的焊接操作。
技术特征:
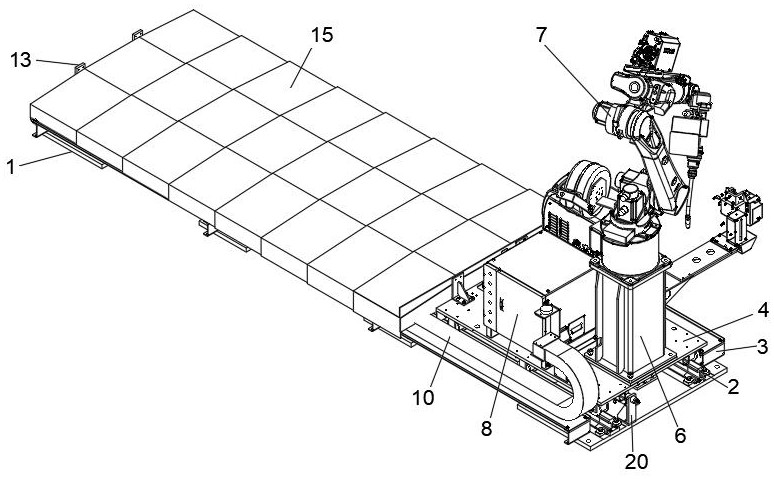
1.一种焊接机器人移动平台,包括多个底板(1),多个所述底板(1)的顶部固定安装有两个导轨(2),其特征在于:多个所述底板(1)的顶部固定安装有两个拖链支板(3),两个所述导轨(2)均位于两个拖链支板(3)之间,两个所述导轨(2)的上方设有同一个滑板(4),所述滑板(4)的底部设有多个滚轮(5),所述滚轮(5)与对应的导轨(2)滚动连接,所述滑板(4)的顶部固定安装有安装座(6),所述安装座(6)的顶部固定安装有焊接机器人主体(7),所述滑板(4)的顶部固定安装有控制组件(8)和驱动电机(9),所述焊接机器人主体(7)和驱动电机(9)均通过导线与控制组件(8)电性连接并形成闭合回路,所述拖链支板(3)上设有拖链(10),所述滑板(4)的顶部固定安装有两个拖链支架(11),所述拖链(10)靠近安装座(6)的一端固定安装在对应的拖链支架(11)上,所述底板(1)的顶部固定安装有光电检测组件(12),所述光电检测组件(12)与滑板(4)相适配,多个所述底板(1)的顶部固定安装有同一个齿条(14),所述齿条(14)位于两个导轨(2)之间,所述驱动电机(9)的输出轴上固定安装有第一锥齿轮(16),所述滑板(4)上转动贯穿有转轴(17),所述转轴(17)的顶端和底端分别固定安装有第二锥齿轮(18)和齿轮(19),所述第一锥齿轮(16)和第二锥齿轮(18)啮合,所述齿轮(19)和齿条(14)啮合。
2.根据权利要求1所述的一种焊接机器人移动平台,其特征在于:两个所述拖链支板(3)还包括折叠遮罩(15),所述折叠遮罩(15)滑动套设在两个拖链支板(3)上,所述滑板(4)和远离滑板(4)的底板(1)的顶部均固定安装有两个固定板(13),所述折叠遮罩(15)的两端分别固定安装在对应的两个固定板(13)上。
3.根据权利要求1所述的一种焊接机器人移动平台,其特征在于:位于两端的两个所述底板(1)的顶部均固定安装有两个限位板(20),所述限位板(20)与滑板(4)相适配。
4.根据权利要求1所述的一种焊接机器人移动平台,其特征在于:所述滑板(4)上开设有矩形凹槽,所述矩形凹槽的底部内壁上贯穿有圆形通孔,所述圆形通孔内内固定安装有转动座,所述转轴(17)转动贯穿转动座。
5.根据权利要求1所述的一种焊接机器人移动平台,其特征在于:多个所述底板(1)的顶部均固定安装有支撑架,所述齿条(14)固定安装在多个支撑架的顶部。
6.根据权利要求1所述的一种焊接机器人移动平台,其特征在于:所述光电检测组件(12)通过导线与控制组件(8)电性连接并形成闭合回路。
7.根据权利要求1所述的一种焊接机器人移动平台,其特征在于:所述底板(1)的顶部固定安装有l形弯板,所述光电检测组件(12)固定安装在对应的l形弯板上。
技术总结
本技术涉及焊接机器人技术领域,具体为一种焊接机器人移动平台。包括多个底板,多个所述底板的顶部固定安装有两个导轨,多个所述底板的顶部固定安装有两个拖链支板,两个所述导轨均位于两个拖链支板之间,两个所述导轨的上方设有同一个滑板,所述滑板的底部设有多个滚轮,所述滚轮与对应的导轨滚动连接,所述滑板的顶部固定安装有安装座,所述安装座的顶部固定安装有焊接机器人主体,所述滑板的顶部固定安装有控制组件和驱动电机。通过简单的遮挡结构,从而能够实现对线缆和导轨的有效遮挡保护,能够防止焊渣和灰尘损伤线缆和导轨,有利于焊接机器人的平稳移动,方便焊接机器人进行不同位置的焊接操作。
技术研发人员:杨盼盼,李向麒,桑建伟,史海涛,代东明,于跃峰
受保护的技术使用者:南京中远通科技有限公司
技术研发日:20230718
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!