一拖二自动定位校准的数控机床的制作方法
本技术涉及数控机床,特别地,涉及一种一拖二自动定位校准的数控机床。
背景技术:
1、目前,数控机床(数控加工中心)一般是独立工作的,一台数控机床一般由一个人负责,工人需要将工件放入到夹具上,动力系统驱动工件旋转,另外还有机构控制刀具靠近装夹在夹具上的工件,通过对刀具的控制,实现车削等作业。由此可见,工人手动装夹工件,效率比较低,而且安全性不高,容易发生安全事故。现在,随着科技水平的发展,有了工业摄像头(ccd摄像头),能稳定高效的应用于工业现场的视频图像采集设备。
2、现在,对于摩托车或汽车刹车盘的这种工件的加工,在上料的过程中,需要对刹车盘进行位置校准,因为数控机床在加工每个工件的时候,需要设置加工原点,以便于其加工定位。一般情况下,采用手动装配工件,所以需要每次手动调整基准点坐标,从而效率比较低。
3、结合现有的工业摄像头技术,现在需要解决的技术问题是:如何提高物料上料到数控机床上比较高效、可靠。
技术实现思路
1、鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种一拖二自动定位校准的数控机床,能够进行高效自动装夹物料进行定位加工的优势。
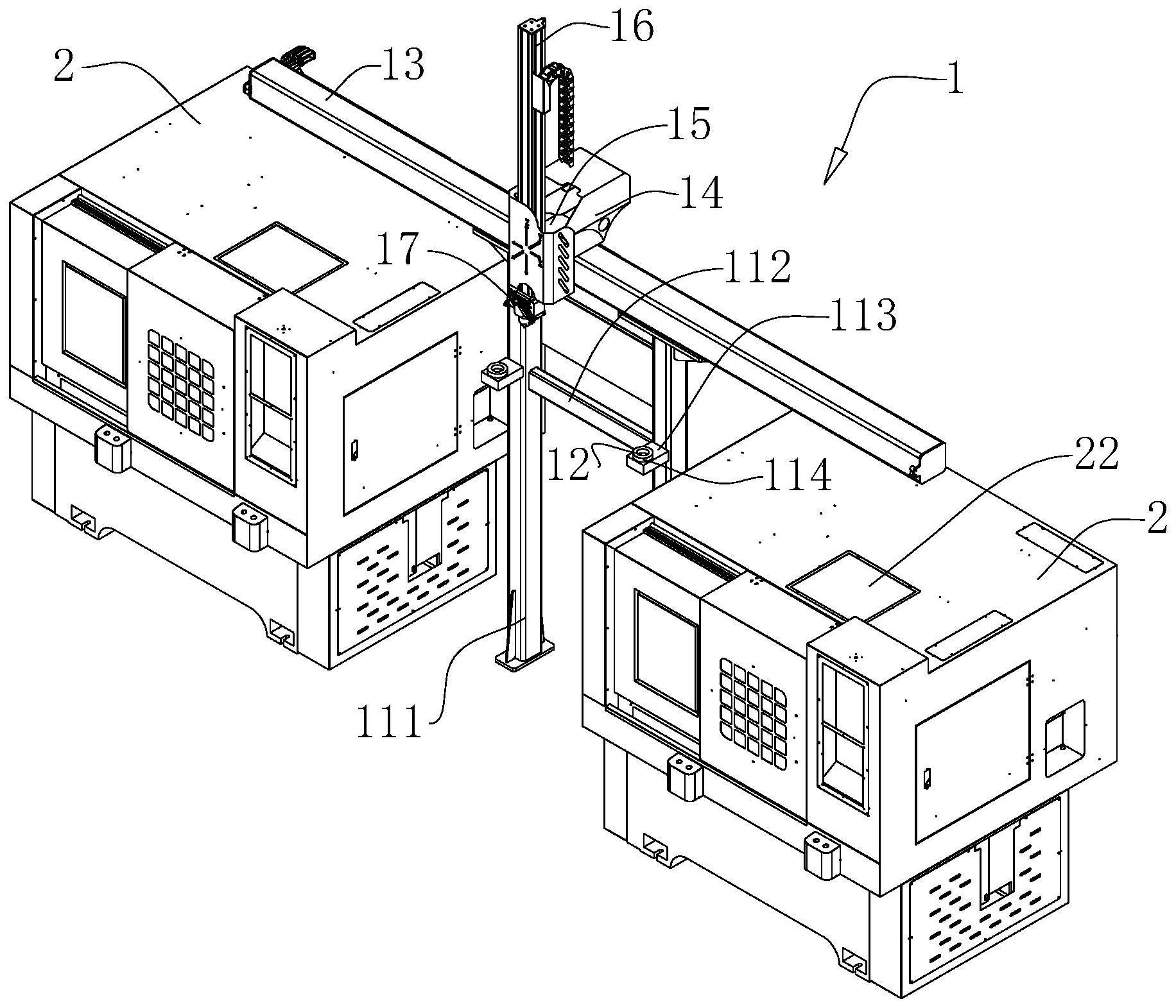
2、为实现上述目的及其他相关目的,本实用新型采用如下技术方案:一种一拖二自动定位校准的数控机床,包括一拖二上料机、两台数控机床单体,两台数控机床单体分别位于一拖二上料机的左右两头,一拖二上料机,包括立柱架、工业摄像头、主机、横梁、x轴驱动器、z轴驱动器、手臂结构梁、以及换向夹持缸,立柱架固定在地面上并在高处固定工业摄像头,工业摄像头连接主机用于采集工件图像反馈给主机,主机通过网络连接数控机床单体进行通信,立柱的顶部固定所述横梁,x轴驱动器安装在横梁上并驱动手臂结构梁在x轴方向左右移动,z轴驱动器安装在横梁上用于驱动手臂结构梁在z轴方向上下移动,在手臂结构梁的下端安装所述换向夹持缸,换向夹持缸用于夹持工件,其中主机控制换向夹持缸夹持工件并停留在工业摄像头位置等待工业摄像头拍照识别定位结束后,继续携带工件放置到数控机床单体中。
3、优选的,所述立柱架包括两个立柱梁,两个立柱梁之间设置有连接梁,在每个立柱梁上设置有安装台,安装台上固定工业摄像头,工业摄像头拍摄方向朝上。
4、优选的,安装台上还设置有一圈补偿灯,补偿灯用于在工业摄像头拍照工作时照明工件。
5、优选的,所述数控机床单体的顶部设置有入口,入口处滑移设置有挡板,所述挡板连接有驱动气缸,驱动气缸控制挡板打开入口或封闭入口。
6、优选的,所述换向夹持缸包括角块底座、旋转气缸、角块安装座、装夹组件,所述角块底座具有45倾斜的斜面供旋转气缸的底部固定,旋转气缸的转轴固定连接在角块安装座的底部,角块安装座上有水平面和竖直面,水平面和竖直面分别安装所述装夹组件。
7、优选的,所述装夹组件包括夹爪驱动器、固定架、导向柱、弹簧和推架,所述夹爪驱动器的周向侧面固定多个所述固定架,固定架上固定连接导向柱,导向柱上套接所述弹簧,推架的端部套接在导向柱上滑动。
8、相比于背景技术,本实用新型技术效果主要体现在以下方面:
9、1、工件可以通过上料机进行自动拾取,一拖二上料机工作情况下,可以让物料在工业摄像头处停留拍照,利用主机进行数据通信,及时调整数控机床单体的定位数据,从而能够匹配工件在数控机床单体上的装夹和加工,从而提高了工作效率和工作可靠性,另外在一拖二上料机的左右分布数控机床单体,这样一来,当一拖二上料机给一边的数控机床单体完成上料后,在此等待加工完成的时间段内,一拖二上料机给另一边的数控机床单体完成上料,从而可以提高工作效率;
10、2、为了便于物料的装夹,在数控机床单体的进入方式是由上部的入口进入,不仅安全,而且在加工的时候,可以通过驱动气缸来封闭入口,避免碎屑飞溅出去;
11、3、装夹组件能够进行角度切换,可以将工件位置从朝向下切换到朝向侧面,以便于数控机床单体进行装夹加工。
技术特征:
1.一种一拖二自动定位校准的数控机床,包括一拖二上料机(1)、两台数控机床单体(2),其特征是:两台数控机床单体(2)分别位于一拖二上料机(1)的左右两头,
2.根据权利要求1所述的一拖二自动定位校准的数控机床,其特征是:所述立柱架(11)包括两个立柱梁(111),两个立柱梁(111)之间设置有连接梁(112),在每个立柱梁(111)上设置有安装台(113),安装台(113)上固定工业摄像头(12),工业摄像头(12)拍摄方向朝上。
3.根据权利要求2所述的一拖二自动定位校准的数控机床,其特征是:安装台(113)上还设置有一圈补偿灯(114),补偿灯(114)用于在工业摄像头(12)拍照工作时照明工件。
4.根据权利要求1所述的一拖二自动定位校准的数控机床,其特征是:所述数控机床单体(2)的顶部设置有入口(21),入口(21)处滑移设置有挡板(22),所述挡板(22)连接有驱动气缸,驱动气缸控制挡板(22)打开入口(21)或封闭入口(21)。
5.根据权利要求1所述的一拖二自动定位校准的数控机床,其特征是:所述换向夹持缸(17)包括角块底座(171)、旋转气缸(172)、角块安装座(173)、装夹组件(174),所述角块底座(171)具有45倾斜的斜面供旋转气缸(172)的底部固定,旋转气缸(172)的转轴固定连接在角块安装座(173)的底部,角块安装座(173)上有水平面和竖直面,水平面和竖直面分别安装所述装夹组件(174)。
6.根据权利要求5所述的一拖二自动定位校准的数控机床,其特征是:所述装夹组件(174)包括夹爪驱动器(1741)、固定架(1742)、导向柱(1743)、弹簧(1744)和推架(1745),所述夹爪驱动器(1741)的周向侧面固定多个所述固定架(1742),固定架(1742)上固定连接导向柱(1743),导向柱(1743)上套接所述弹簧(1744),推架(1745)的端部套接在导向柱(1743)上滑动。
技术总结
本技术公开了一种一拖二自动定位校准的数控机床,属于数控机床技术领域,解决的问题为:如何提高物料上料到数控机床的效率;其技术方案要点是两台数控机床单体分别位于一拖二上料机的左右,一拖二上料机包括立柱架、工业摄像头、主机、横梁、X轴驱动器、Z轴驱动器、手臂结构梁和换向夹持缸,工业摄像头用于采集工件图像反馈给主机,主机通过网络连接数控机床单体进行通信,X轴驱动器驱动手臂结构梁左右移动,Z轴驱动器用于驱动手臂结构梁上下移动,换向夹持缸用于夹持工件,其中主机控制换向夹持缸夹持工件并停留在工业摄像头位置等待工业摄像头拍照识别定位结束后,继续携带工件放置到数控机床单体中,达到了的效果为:提高加工效率。
技术研发人员:张周春,张坤
受保护的技术使用者:玉环鑫龙数控机床厂
技术研发日:20230724
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!