焊接机器人工作平台的制作方法
本技术涉及焊接机器人,具体为焊接机器人工作平台。
背景技术:
1、随着科技的不断发展,机器人已经成为了各个领域的重要角色,从生产到服务再到医疗,机器人的应用范围越来越广泛,对于人类社会的进步和发展也起到了积极的推动作用,在制造行业中,机器人可以承担焊接、涂漆、组装等重复性高、危险度大的工作,从而提高了生产效率和产品质量,在机器人焊接的过程中一般会使用焊接机器人工作平台对焊接件进行承载,现有的焊接机器人工作平台一般由支撑架和钢板平台构成,使用时将焊接件安装到钢板平台的表面,然后焊接机器人进行焊接,结构简单使用成本低,但焊接的过程中一般不对对焊接件进行旋转,进而影响焊接效率。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供焊接机器人工作平台,使用范围广,并且能进行旋转,旋转精度高,承载能力强,提高了焊接机器人的焊接效率和焊接质量,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:焊接机器人工作平台,包括底架;
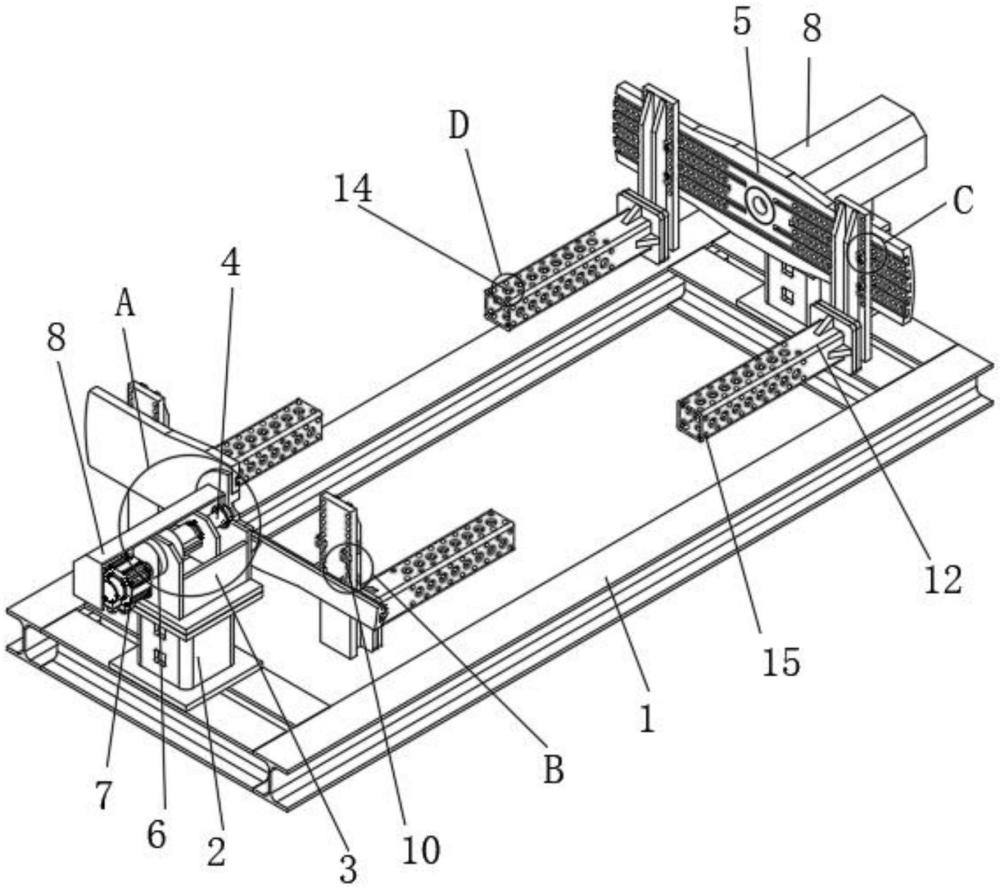
3、底架:其上表面的左右两端均设有加高底座,加高底座的上表面均设有固定座,固定座靠近底架横向中心的一端前支撑板均通过轴承转动连接有支撑轴,支撑轴靠近底架横向中心的一端均设有旋转摆臂,两个旋转摆臂的相对内侧面均设有均匀分布的t型槽,托架采用多孔洞设计,方便不同焊接工装的安装定位,使用通用性好,可以快速更换焊接产品,并且旋转摆臂采用滑道和多孔设计,从而实现了本工作平台所焊接产品的多样性,使用范围广,同时旋转摆臂通过托架和焊接工装对焊接件进行旋转,然方便焊接机器人的焊接,提高了焊接机器人的焊接效率和焊接质量。
4、进一步的,所述旋转摆臂远离支撑轴的侧面均开设有均匀分布的定位销孔,方便旋转摆臂上构件的定位。
5、进一步的,所述固定座远离底架横向中心一端的后支撑板均设有减速机,减速机的输出轴均通过联轴器与横向相邻的支撑轴固定连接,减速机远离支撑轴的一端均设有伺服电机,伺服电机的输入端电连接外部控制器的输出端,方便驱动旋转摆臂的旋转。
6、进一步的,所述固定座的上端均设有防护罩,伺服电机、减速机和支撑轴均位于竖向对应的防护罩的内部,对内部的零部件进行防护。
7、进一步的,所述旋转摆臂靠近底架横向中心的侧面均安装有对称分布的托架,方便焊接工装的平装。
8、进一步的,还包括t型块,所述t型块分别安装于t型槽的内部,托架的内部安装有均匀分布的螺钉,螺钉分别与横向相邻的t型块螺纹连接,方便托架的安装。
9、进一步的,所述托架的内部设有均匀分布的定位销,定位销分别与横向相邻的定位销孔活动插接,提高托架的安装精度。
10、进一步的,所述托架的外表面设有均匀分布的固定孔,方便焊接工装的固定。
11、进一步的,所述固定座的中部均设有中间支撑板,支撑轴均通过轴承与竖向对应的中间支撑板转动连接,增强支撑轴的支撑强度。
12、进一步的,所述托架的外表面设有均匀分布的定位孔,方便焊接工装的定位。
13、与现有技术相比,本实用新型的有益效果是:本焊接机器人工作平台,具有以下好处:
14、1、使用时将焊接工装安装到托架上,安装时将焊接工装的凸柱与对应的定位孔活动插接,然后使用螺栓穿过固定孔和焊接工装的通孔对焊接工装和托架进行连接,并且定位孔和固定孔均匀分布,进而可以根据使用的需求更改焊接工装的安装位置,以及更改不同型号托架,托架采用多孔洞设计,方便不同焊接工装的安装定位,使用通用性好,可以快速更换焊接产品,提高生产效率。
15、2、外部控制器控制伺服电机工作,伺服电机的输出轴带动减速机的输入轴进行旋转,减速机进行减速并带动支撑轴进行旋转,支撑轴带动旋转摆臂进行旋转,旋转摆臂通过托架和焊接工装对焊接件进行旋转,然方便焊接机器人的焊接,提高机器人的焊接效率,并且采用伺服电机驱动,旋转角度精准,支撑轴进行支撑承载能力强,提高了焊接机器人的焊接效率和焊接质量。
16、3、使用过程中,可以松开螺钉,将定位销与定位销孔分离后,可以移动托架,更改托架的安装位置或安装不同型号的托架,同时可以根据使用的需求将焊接工装安装到旋转摆臂的上方,进而方便焊接工装的立装,旋转摆臂采用滑道和多孔设计,可随时且方便的更换安装不同的托架,从而实现了本工作平台所焊接产品的多样性。
技术特征:
1.焊接机器人工作平台,其特征在于:包括底架(1);
2.根据权利要求1所述的焊接机器人工作平台,其特征在于:所述旋转摆臂(5)远离支撑轴(4)的侧面均开设有均匀分布的定位销孔(16)。
3.根据权利要求1所述的焊接机器人工作平台,其特征在于:所述固定座(3)远离底架(1)横向中心一端的后支撑板(18)均设有减速机(6),减速机(6)的输出轴均通过联轴器与横向相邻的支撑轴(4)固定连接,减速机(6)远离支撑轴(4)的一端均设有伺服电机(7),伺服电机(7)的输入端电连接外部控制器的输出端。
4.根据权利要求3所述的焊接机器人工作平台,其特征在于:所述固定座(3)的上端均设有防护罩(8),伺服电机(7)、减速机(6)和支撑轴(4)均位于竖向对应的防护罩(8)的内部。
5.根据权利要求1所述的焊接机器人工作平台,其特征在于:所述旋转摆臂(5)靠近底架(1)横向中心的侧面均安装有对称分布的托架(12)。
6.根据权利要求5所述的焊接机器人工作平台,其特征在于:还包括t型块(10),所述t型块(10)分别安装于t型槽(9)的内部,托架(12)的内部安装有均匀分布的螺钉(11),螺钉(11)分别与横向相邻的t型块(10)螺纹连接。
7.根据权利要求6所述的焊接机器人工作平台,其特征在于:所述托架(12)的内部设有均匀分布的定位销(13),定位销(13)分别与横向相邻的定位销孔(16)活动插接。
8.根据权利要求5所述的焊接机器人工作平台,其特征在于:所述托架(12)的外表面设有均匀分布的固定孔(14)。
9.根据权利要求5所述的焊接机器人工作平台,其特征在于:所述托架(12)的外表面设有均匀分布的定位孔(15)。
10.根据权利要求1所述的焊接机器人工作平台,其特征在于:所述固定座(3)的中部均设有中间支撑板(31),支撑轴(4)均通过轴承与竖向对应的中间支撑板(31)转动连接。
技术总结
本技术公开了焊接机器人工作平台,包括底架;底架:其上表面的左右两端均设有加高底座,加高底座的上表面均设有固定座,固定座靠近底架横向中心的一端前支撑板均通过轴承转动连接有支撑轴,支撑轴靠近底架横向中心的一端均设有旋转摆臂,两个旋转摆臂的相对内侧面均设有均匀分布的T型槽,旋转摆臂远离支撑轴的侧面均开设有均匀分布的定位销孔,固定座远离底架横向中心一端的后支撑板均设有减速机,该焊接机器人工作平台,可以快速更换焊接产品,使用范围广,同时旋转摆臂通过托架和焊接工装对焊接件进行旋转,方便焊接机器人的焊接,提高了焊接机器人的焊接效率和焊接质量。
技术研发人员:吴国兴
受保护的技术使用者:弘亚机械科技(焦作)有限公司
技术研发日:20230727
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!