一种自行走机器人钻攻机的制作方法
本技术涉及钻攻机,具体涉及一种自行走机器人钻攻机。
背景技术:
1、很多产品在装配时需配制螺纹孔,但是由于产品材料特性比较脆,零件尺寸大,装配面曲率大的问题导致很难使用普通的手电钻直接钻孔、手工攻丝。因此,现有技术中多采用钻攻机来替代普通的手电钻进行作业,该钻攻机钻设螺纹孔时需要进行找孔、锁死、钻孔、换丝锥以及攻丝五个步骤,但是,找孔和锁死很难一次性完成,因为常规钻攻机找到位置后锁紧,锁紧需对每一个可活动结点单独操作,而锁紧结点时会因为出现晃动导致锁紧时钻孔位置偏离初始确认位置,因此需要多次调整,导致工作效率降低。
技术实现思路
1、因此,本实用新型要解决的技术问题在于现有技术中的钻攻机找孔和锁死很难一次性完成,需要多次调整,导致工作效率降低,从而提供一种自行走机器人钻攻机。
2、为解决上述技术问题,本实用新型的技术方案如下:
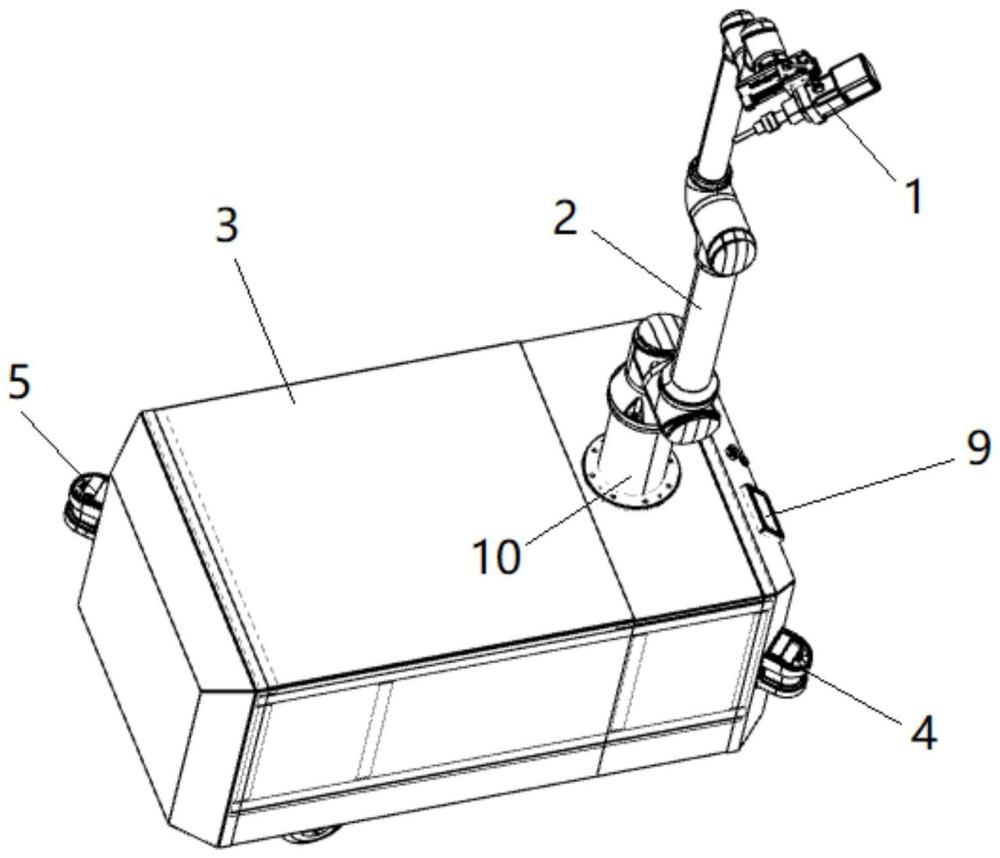
3、本实用新型提供一种自行走机器人钻攻机,包括:钻攻机,用于钻设目标孔;协作机器人,包括相连的底座与机械臂,所述钻攻机安装在所述机械臂远离所述底座的一端,所述机械臂能够带动所述钻攻机运动至目标孔所在的位置并进行自锁;平台车,所述协作机器人通过底座安装在所述平台车上,所述平台车适于驱动所述协作机器人在作业区域内运动。
4、进一步地,所述机械臂能够对不同位置的目标孔进行记录,以在所述钻攻机依次对不同位置的目标孔进行钻孔作业后驱动所述钻攻机返回并依次对不同位置的目标孔进行攻丝作业。
5、进一步地,所述平台车包括信号连接的触摸屏与控制柜,所述控制柜与所述机械臂信号连接,通过所述触摸屏能够控制所述机械臂从上一个目标孔的位置移动至下一个目标孔的位置。
6、进一步地,所述平台车的底部设置有四个脚轮,位于所述平台车后方的两个所述脚轮为能够驱动所述平台车行走和转向的主动轮,位于所述平台车前方的两个所述脚轮为从动轮。
7、进一步地,所述平台车的底部设置有四个电动缸,四个所述电动缸伸出时能够使所述平台车的四个脚轮悬空,以限制所述平台车运动。
8、进一步地,所述平台车还包括第一避障传感器与第二避障传感器,所述第一避障传感器设置在所述平台车的车头,所述第二避障传感器设置在所述平台车的车尾;所述第一避障传感器与第二避障传感器均与所述控制柜信号连接,所述第一避障传感器与所述第二避障传感器能够检测所述平台车周围存在的障碍物信息并反馈至所述控制柜,所述控制柜能够根据所述障碍物信息控制所述主动轮驱动所述平台车进行避障行驶。
9、进一步地,所述平台车还包括蓄电池,所述协作机器人及所述钻攻机均与所述蓄电池电连接,以使所述蓄电池为所述协作机器人及所述钻攻机供电。
10、本实用新型技术方案,具有如下优点:
11、本实用新型提供的自行走机器人钻攻机,利用机械臂将钻攻机移动至目标孔所在的位置,并且利用机械臂的自锁功能将钻攻机的位置固定,相较于常规的钻攻机而言,不会在锁紧时出现位置偏离,缩短了配孔时间,有利于提高工作效率。而且,可以通过平台车带动协作机器人及钻攻机在作业区域内移动,提高了钻孔作业的自动化程度,有利于节省人力成本。
技术特征:
1.一种自行走机器人钻攻机,其特征在于,包括:
2.根据权利要求1所述的自行走机器人钻攻机,其特征在于,
3.根据权利要求1所述的自行走机器人钻攻机,其特征在于,
4.根据权利要求3所述的自行走机器人钻攻机,其特征在于,
5.根据权利要求4所述的自行走机器人钻攻机,其特征在于,
6.根据权利要求4所述的自行走机器人钻攻机,其特征在于,
7.根据权利要求3所述的自行走机器人钻攻机,其特征在于,
技术总结
本技术涉及钻攻机技术领域,提供了一种自行走机器人钻攻机,包括:钻攻机;协作机器人,包括相连的底座与机械臂,钻攻机安装在机械臂远离底座的一端,机械臂能够带动钻攻机运动至目标孔所在的位置并进行自锁;平台车,协作机器人通过底座安装在平台车上,平台车适于驱动协作机器人在作业区域内运动。该自行走机器人钻攻机,利用机械臂将钻攻机移动至目标孔所在的位置,并且利用机械臂的自锁功能将钻攻机的位置固定,相较于常规的钻攻机而言,不会在锁紧时出现位置偏离,缩短了配孔时间,有利于提高工作效率。而且,可以通过平台车带动协作机器人及钻攻机在作业区域内移动,提高了钻孔作业的自动化程度,有利于节省人力成本。
技术研发人员:释加才让,蒋世英,焦龙,王冠,于勇智,苗成栋,杨海龙,皇甫少飞,李轲,吴建康
受保护的技术使用者:北京天仁道和新材料有限公司
技术研发日:20230814
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!