一种三维激光机的制作方法
本技术涉及激光机领域,尤其涉及一种三维激光机。
背景技术:
1、三维激光需要平面视觉进行激光标定的自动化以及工件的平面定位,由于一般情况下三维激光的工作距离和平面视觉的工作距离并不一致,现有的集成了平面视觉技术的三维激光,一般采用临时外挂平面视觉,这种方式使用较为繁琐;
2、部分专利通过外置三维相机实现三维视觉集成,例如专利《一种基于单轴变位线扫相机的三维激光加工设备》(cn202121252702.0),在三维激光旁固定了一个线扫三维相机,通过标定三维激光与三维相机的位置关系,实现三维相机采集数据到三维激光加工,此方式集成度不高,整体体积硕大、且标定较为复杂。
技术实现思路
1、(一)要解决的技术问题
2、为了解决现有技术的上述问题,本实用新型提供一种三维激光机,提高了整体机器的集成度,简化了激光标定流程。
3、(二)技术方案
4、为了达到上述目的,本实用新型采用的主要技术方案包括:一种三维激光机,包括:
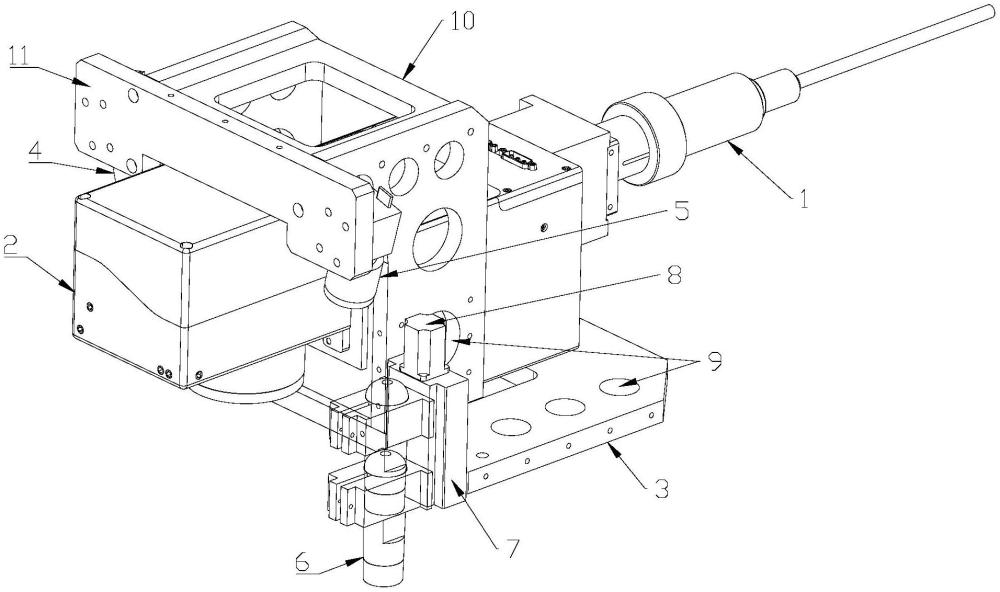
5、振镜模组;
6、激光入射件,与所述振镜模组相连通,用于传输入射激光至振镜模组;
7、双目系统,包括第一相机和第二相机,所述第一相机和第二相机分别设置于所述振镜模组的上方两侧;
8、第三相机,设置于所述振镜模组的一侧且位于所述双目系统的下方,所述第三相机可上下活动。
9、进一步地,还包括:
10、升降台,所述第三相机竖直活动连接于所述升降台上;
11、伺服电机,用于驱动所述第三相机在所述升降台上活动。
12、进一步地,还包括:
13、底板,所述振镜模组和升降台分别固定于所述底板上;
14、冂型支架,固定于所述底板上,所述振镜模组位于所述冂型支架内;
15、连接支架,固定于所述冂型支架的前侧,所述冂型支架的前侧为远离所述激光入射件的一侧,所述第一相机和第二相机分别设置于所述连接支架的左右两侧。
16、进一步地,所述底板的表面和冂型支架的表面均设有开孔。
17、进一步地,所述第三相机采用高倍率镜头。
18、进一步地,所述第三相机自带有光源发生件。
19、(三)有益效果
20、本实用新型的有益效果是:激光入射件和振镜模组成三维激光组件,第三相机可向下移动调节激光标定,标定完成后向上移动避免对双目系统和三维激光组件的后续作业产生影响,双目系统采集数据到三维激光组件进行加工作业。因此,本实用新型的三维激光机将双目系统和三维激光组件集成至一起,同时集成三维视觉、平面视觉,可以实现单机台标定、三维成像、三维激光加工,提高了集成度,降低了整体体积,简化了标定流程。
技术特征:
1.一种三维激光机,其特征在于,包括:
2.根据权利要求1所述的三维激光机,其特征在于,还包括:
3.根据权利要求2所述的三维激光机,其特征在于,还包括:
4.根据权利要求3所述的三维激光机,其特征在于,所述底板的表面和冂型支架的表面均设有开孔。
5.根据权利要求1所述的三维激光机,其特征在于,所述第三相机采用高倍率镜头。
6.根据权利要求1所述的三维激光机,其特征在于,所述第三相机自带有光源发生件。
技术总结
本技术涉及一种三维激光机,包括振镜模组;激光入射件,与振镜模组相连通,用于传输入射激光至振镜模组;双目系统,包括第一相机和第二相机,第一相机和第二相机分别设置于振镜模组上方两侧;第三相机,设置于振镜模组的一侧且位于双目系统的下方,第三相机可上下活动。激光入射件和振镜模组成三维激光组件,第三相机可向下移动调节激光标定,标定完成后向上移动避免对后续作业产生影响,双目系统采集数据到三维激光组件进行加工作业。因此,本技术的三维激光机将双目系统和三维激光组件集成至一起,同时集成三维视觉、平面视觉,可以实现单机台标定、三维成像、三维激光加工,提高了集成度,降低了整体体积,简化了标定流程。
技术研发人员:钟靖,林雨,黄含强,蔡艇,陈玉辉,元波
受保护的技术使用者:泉州冰点科技有限公司
技术研发日:20230818
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!