一种用于焊接机器人的转动机构的制作方法
本技术涉及转动机构,特别涉及一种用于焊接机器人的转动机构。
背景技术:
1、焊接机器人是从事焊接的工业机器人,根据国际标准化组织工业机器人属于标准焊接机器人的定义。
2、现有的焊接机器人在对两个大小不同的焊接工件进行夹持时,由于焊接机器人中的夹具不能进行调节,导致两个大小不同焊接工件的焊接缝隙不能对齐,从而影响焊接的精确度,为此,我们提出一种用于焊接机器人的转动机构,来解决现有的焊接机器人中的夹具不能调节,导致焊接缝隙不能对齐,降低了焊接的精度的问题。
技术实现思路
1、本实用新型的目的在于提供一种用于焊接机器人的转动机构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种用于焊接机器人的转动机构,包括底板,所述底板的上方设置有两个用于夹持焊接工件的夹具,其中一个所述夹具的一侧设置有调节机构;
3、所述调节机构包括第一立杆,所述第一立杆的一侧设置有矩形槽,所述矩形槽内部的底端固定连接有第一气缸,所述第一气缸的顶端固定连接有滑块,所述滑块的外壁与矩形槽的内部滑动连接,所述滑块的一侧转动连接有第一转动板,所述第一转动板远离滑块的一侧与其中一个夹具的一侧固定连接。
4、优选的,所述另一个夹具的一侧设置有第二立杆,所述第二立杆靠近另一个夹具的一侧转动连接有第二转动板,所述第二立杆远离第二转动板的一侧固定连接有驱动第二转动板转动的第一电机。
5、优选的,所述底板的顶端设置有滑槽,所述滑槽的内部滑动连接有安装板,所述滑槽的内部固定连接有驱动安装板运动的第二气缸,所述安装板的内部设置有驱动第一立杆与第二立杆运动的驱动机构。
6、优选的,所述驱动机构包括内槽,所述内槽设置于安装板的顶端,所述内槽的内部转动连接有螺杆,所述螺杆的外壁分别于第一立杆的底端和第二立杆的底端螺纹穿插连接。
7、优选的,所述底板的顶端固定连接有套筒,所述套筒的内部滑动连接有连接杆,所述连接杆的底端固定连接有第三气缸,所述连接杆的顶端固定连接有固定板。
8、优选的,所述固定板的顶端固定连接有焊接机器人本体,所述焊接机器人本体的内部设置有焊枪,所述焊枪位于焊接机器人本体内部的位置固定连接有转动轴,所述转动轴的两端与焊接机器人本体的内部转动连接,所述焊接机器人本体的外壁固定连接有驱动转动轴转动的第二电机。
9、本实用新型的技术效果和优点:
10、本实用新型通过对第一立杆、矩形槽、气缸、滑块和第一转动板的设置,在夹具对焊接工件进行夹持时,可通过气缸,对夹具的高度进行调节,从而使焊接工件的焊缝对齐,解决了现有的焊接机器人中的夹具不能调节,使焊接工件的焊缝不能对齐的问题,提高了焊接的精度。
技术特征:
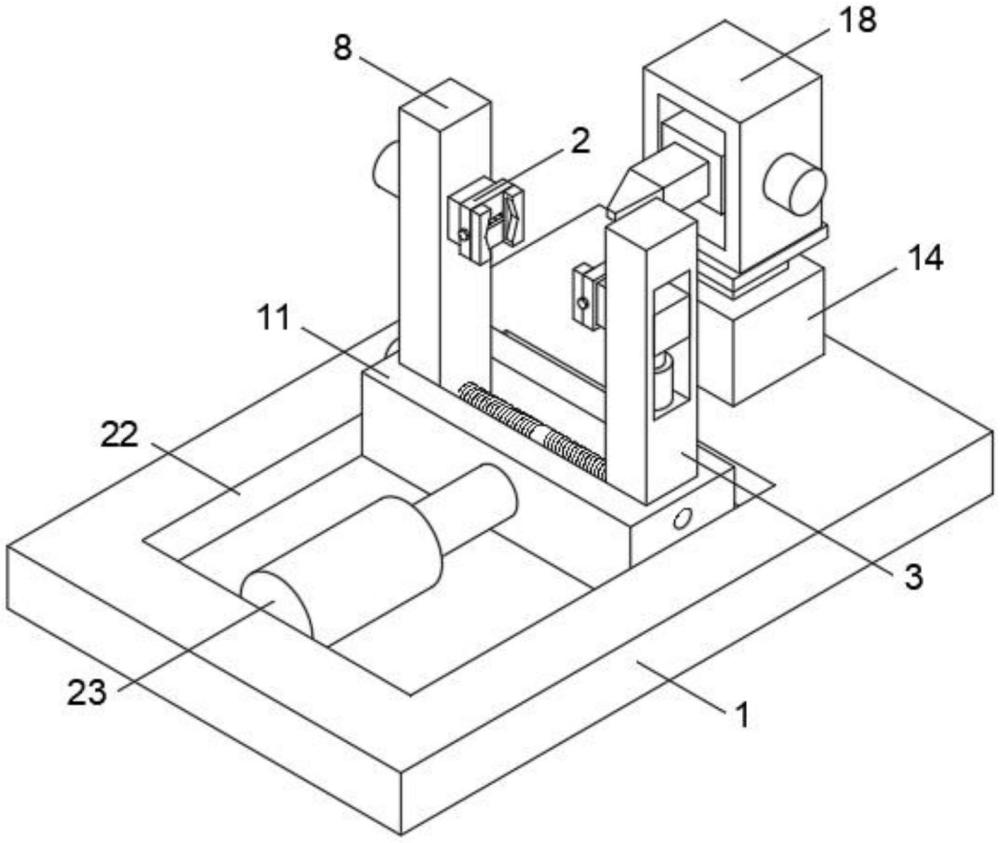
1.一种用于焊接机器人的转动机构,包括底板(1),所述底板(1)的上方设置有两个用于夹持焊接工件的夹具(2),其特征在于,其中一个所述夹具(2)的一侧设置有调节机构;
2.根据权利要求1所述的一种用于焊接机器人的转动机构,其特征在于,所述另一个夹具(2)的一侧设置有第二立杆(8),所述第二立杆(8)靠近另一个夹具(2)的一侧转动连接有第二转动板(9),所述第二立杆(8)远离第二转动板(9)的一侧固定连接有驱动第二转动板(9)转动的第一电机(10)。
3.根据权利要求1所述的一种用于焊接机器人的转动机构,其特征在于,所述底板(1)的顶端设置有滑槽(22),所述滑槽(22)的内部滑动连接有安装板(11),所述滑槽(22)的内部固定连接有驱动安装板(11)运动的第二气缸(23),所述安装板(11)的内部设置有驱动第一立杆(3)与第二立杆(8)运动的驱动机构。
4.根据权利要求3所述的一种用于焊接机器人的转动机构,其特征在于,所述驱动机构包括内槽(12),所述内槽(12)设置于安装板(11)的顶端,所述内槽(12)的内部转动连接有螺杆(13),所述螺杆(13)的外壁分别于第一立杆(3)的底端和第二立杆(8)的底端螺纹穿插连接。
5.根据权利要求1所述的一种用于焊接机器人的转动机构,其特征在于,所述底板(1)的顶端固定连接有套筒(14),所述套筒(14)的内部滑动连接有连接杆(15),所述连接杆(15)的底端固定连接有第三气缸(16),所述连接杆(15)的顶端固定连接有固定板(17)。
6.根据权利要求5所述的一种用于焊接机器人的转动机构,其特征在于,所述固定板(17)的顶端固定连接有焊接机器人本体(18),所述焊接机器人本体(18)的内部设置有焊枪(19),所述焊枪(19)位于焊接机器人本体(18)内部的位置固定连接有转动轴(20),所述转动轴(20)的两端与焊接机器人本体(18)的内部转动连接,所述焊接机器人本体(18)的外壁固定连接有驱动转动轴(20)转动的第二电机(21)。
技术总结
本技术公开了一种用于焊接机器人的转动机构,包括底板,底板的上方设置有两个夹具,其中一个夹具的一侧设置有调节机构;调节机构包括第一立杆,第一立杆的一侧设置有矩形槽,矩形槽内部的底端固定连接有第一气缸,第一气缸的顶端固定连接有滑块,滑块的外壁与矩形槽的内部滑动连接,滑块的一侧转动连接有第一转动板,第一转动板远离滑块的一侧与其中一个夹具的一侧固定连接。本技术通过对第一立杆、矩形槽、气缸、滑块和第一转动板的设置,在夹具对焊接工件进行夹持时,可通过气缸,对夹具的高度进行调节,从而使焊接工件的焊缝对齐,提高了焊接的精度。
技术研发人员:贺忠慧
受保护的技术使用者:长春聚德龙铁塔集团有限公司
技术研发日:20230831
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!