多功能焊接装置的制作方法
本申请涉及电池焊接工艺,特别是涉及一种多功能焊接装置。
背景技术:
1、方壳电芯的生产过程中,包括多种焊接工艺,以对方壳电芯的不同部位进行焊接。故而相关技术中通常设置多种焊接设备对方壳电芯进行焊接,焊接成本高。
技术实现思路
1、基于此,有必要针对相关技术中对方壳电芯进行焊接的焊接成本高的问题,提供一种多功能焊接装置。
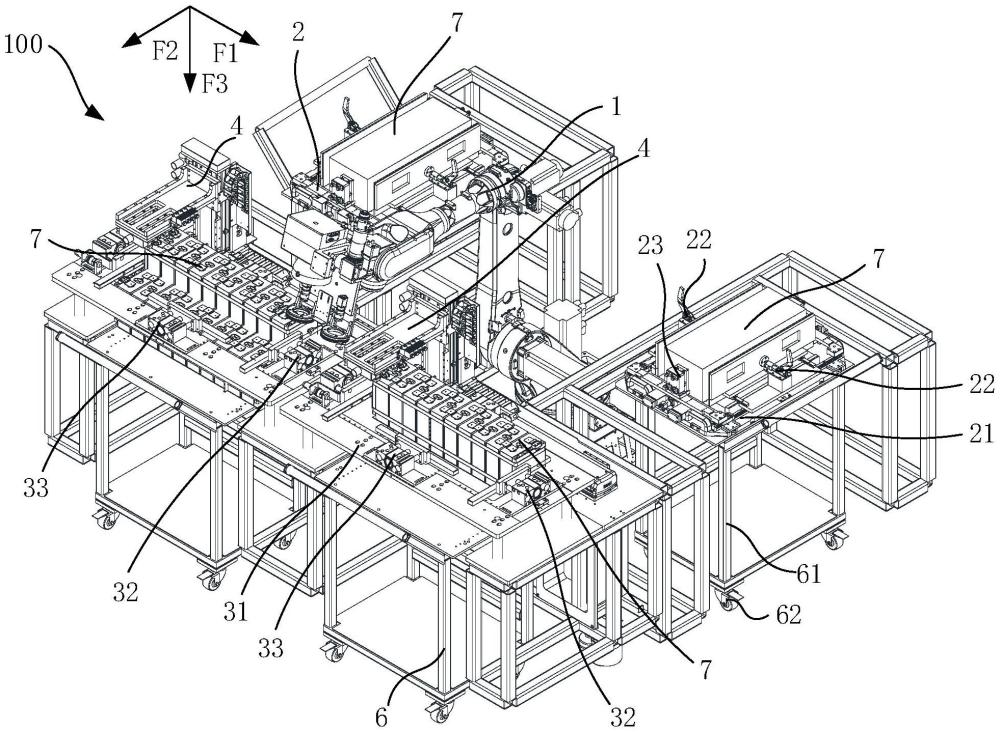
2、一种多功能焊接装置,用于焊接方壳电芯,所述多功能焊接装置包括:
3、焊接机器人;以及
4、第一固定机构和第二固定机构,所述第一固定机构和所述第二固定机构围绕所述焊接机器人间隔布设;
5、其中,所述第一固定机构用于固定所述方壳电芯,并使所述方壳电芯的第一焊接部朝向所述焊接机器人,所述第二固定机构用于固定并列排布的多个所述方壳电芯;
6、所述焊接机器人被配置为能够对所述第一固定机构上的所述方壳电芯的所述第一焊接部进行焊接,且被配置为能够将连接片焊接于所述第二固定机构上的相邻两个所述方壳电芯上。
7、本申请的第一固定机构和第二固定机构用于对方壳电芯进行限位,从而避免方壳电芯在焊接过程中发生位移,影响焊接效果。且第一固定机构和第一固定机构围绕焊接机器人间隔布设,使得焊接机器人能够对方壳电芯的第一焊接部焊接,且能够对方壳电芯的连接片焊接,兼顾了方壳电芯的第一焊接部和连接片的焊接,从而无需采用多种焊接设备对方壳电芯进行焊接,进而降低方壳电芯的焊接成本。
8、在其中一个实施例中,所述多功能焊接装置包括多个所述第一固定机构和多个所述第二固定机构,多个所述第一固定机构和多个所述第二固定机构围绕所述焊接机器人间隔布设。
9、在其中一个实施例中,所述焊接机器人包括六轴机器人。
10、在其中一个实施例中,所述第一固定机构包括第一本体、两个第一限位件和两个第二限位件,两个所述第一限位件沿所述第一方向间隔设于所述第一本体,两个所述第二限位件沿所述第二方向间隔设于所述第一本体;
11、所述方壳电芯沿所述第一方向限位于两个所述第一限位件之间,且沿所述第二方向限位于两个所述第二限位件之间;
12、所述第一方向与所述第二方向彼此相交。
13、在其中一个实施例中,所述第一限位件包括第一底座和第一抵接件,所述第一抵接件能够相对于所述第一底座沿所述第一方向移动。
14、在其中一个实施例中,所述第二限位件包括第二底座、第二抵接件和弹性件,所述第二底座和所述第二抵接件沿所述第二方向间隔设置,所述弹性件弹性连接于所述第二底座和所述第二抵接件之间。
15、在其中一个实施例中,所述第二固定机构包括第二本体、两个第三限位件和两个第四限位件,两个所述第三限位件沿所述第一方向间隔设于所述第二本体,两个所述第四限位件沿所述第二方向间隔设于所述第二本体;
16、所述方壳电芯沿所述第一方向限位于两个所述第三限位件之间,且沿所述第二方向限位于两个所述第四限位件之间;
17、所述第一方向与所述第二方向彼此相交。
18、在其中一个实施例中,所述第三限位件包括第三本体、第三驱动件和第三抵接件,所述第三驱动件连接于所述第三本体和所述第三抵接件之间,用于驱动所述第三抵接件沿所述第一方向移动,以使第三抵接件抵接于所述方壳电芯;和/或
19、所述第四限位件包括第四本体、第四驱动件和第四抵接件,所述第四驱动件连接于所述第四本体和所述第四抵接件之间,用于驱动所述第四抵接件沿所述第二方向移动,以使第四抵接件抵接于所述方壳电芯。
20、在其中一个实施例中,所述第二本体设有沿所述第一方向间隔设置的多个第一通孔,所述第三限位件设有与所述第一通孔对应的第一连接孔;和/或
21、所述第二本体设有沿所述第二方向间隔设置的多个第二通孔,所述第四限位件设有与所述第二通孔对应的第二连接孔。
22、在其中一个实施例中,所述第二固定机构还包括抵接件,所述抵接件设于所述方壳电芯一侧,且能够沿第三方向抵接于所述连接片背离所述方壳电芯的一侧;其中,所述第三方向平行于所述第一固定机构的顶部指向所述第一固定机构的底部的方向;和/或
23、所述多功能焊接装置还包括通用小车,所述通用小车包括支撑架和设于所述支撑架上的车轮,所述支撑架被设置为能够和所述第一固定机构或所述第二固定机构可拆卸地连接。
技术特征:
1.一种多功能焊接装置,用于焊接方壳电芯,其特征在于,所述多功能焊接装置包括:
2.根据权利要求1所述的多功能焊接装置,其特征在于,所述多功能焊接装置包括多个所述第一固定机构和多个所述第二固定机构,多个所述第一固定机构和多个所述第二固定机构围绕所述焊接机器人间隔布设。
3.根据权利要求1所述的多功能焊接装置,其特征在于,所述焊接机器人包括六轴机器人。
4.根据权利要求1所述的多功能焊接装置,其特征在于,所述第一固定机构包括第一本体、两个第一限位件和两个第二限位件,两个所述第一限位件沿第一方向间隔设于所述第一本体,两个所述第二限位件沿第二方向间隔设于所述第一本体;
5.根据权利要求4所述的多功能焊接装置,其特征在于,所述第一限位件包括第一底座和第一抵接件,所述第一抵接件能够相对于所述第一底座沿所述第一方向移动。
6.根据权利要求4所述的多功能焊接装置,其特征在于,所述第二限位件包括第二底座、第二抵接件和弹性件,所述第二底座和所述第二抵接件沿所述第二方向间隔设置,所述弹性件弹性连接于所述第二底座和所述第二抵接件之间。
7.根据权利要求1所述的多功能焊接装置,其特征在于,所述第二固定机构包括第二本体、两个第三限位件和两个第四限位件,两个所述第三限位件沿第一方向间隔设于所述第二本体,两个所述第四限位件沿第二方向间隔设于所述第二本体;
8.根据权利要求7所述的多功能焊接装置,其特征在于,所述第三限位件包括第三本体、第三驱动件和第三抵接件,所述第三驱动件连接于所述第三本体和所述第三抵接件之间,用于驱动所述第三抵接件沿所述第一方向移动,以使第三抵接件抵接于所述方壳电芯;和/或
9.根据权利要求8所述的多功能焊接装置,其特征在于,所述第二本体设有沿所述第一方向间隔设置的多个第一通孔,所述第三限位件设有与所述第一通孔对应的第一连接孔;和/或
10.根据权利要求7所述的多功能焊接装置,其特征在于,所述第二固定机构还包括抵接件,所述抵接件设于所述方壳电芯一侧,且能够沿第三方向抵接于所述连接片背离所述方壳电芯的一侧;其中,所述第三方向平行于所述第一固定机构的顶部指向所述第一固定机构的底部的方向;和/或
技术总结
本申请涉及一种多功能焊接装置。多功能焊接装置用于焊接方壳电芯,多功能焊接装置包括焊接机器人、第一固定机构和第二固定机构,第一固定机构和第二固定机构围绕焊接机器人间隔布设。其中,第一固定机构用于固定方壳电芯,并使方壳电芯的第一焊接部朝向焊接机器人,第二固定机构用于固定并列排布的多个方壳电芯。焊接机器人被配置为能够对第一固定机构上的方壳电芯的第一焊接部进行焊接,且被配置为能够将连接片焊接于第二固定机构上的相邻两个方壳电芯上。本申请兼顾了方壳电芯的第一焊接部和连接片的焊接,从而无需采用多种焊接设备对方壳电芯进行焊接,进而降低方壳电芯的焊接成本。
技术研发人员:徐晓平,董赏,宋东亮,曾建伟,马水春,胡金
受保护的技术使用者:深圳市联鹏智能装备科技有限公司
技术研发日:20230831
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!