一种可调节姿态的焊枪夹具
本技术涉及焊枪夹具领域,具体是一种可调节姿态的焊枪夹具。
背景技术:
1、焊接在现代化工业生产中具有十分重要的作用,广泛应用于机械制造中的毛坯生产和制造各种金属结构件,如汽车车身、受压容器、桥梁等。在现代化的焊接过程中,通常利用工业机器人控制焊枪,对工件进行快速、精准的焊接,如tig焊枪、mig焊枪、激光焊枪等。但是利用工业机器人控制焊枪时,不能将焊枪与机器人直接连接,而是需要利用焊枪夹具定位并夹紧焊枪后,将焊枪夹具连接于机器人末端,从而达到机器人控制焊枪对工件进行自动焊接的目的。焊枪夹具是将焊枪准确定位并夹紧,用于装配和焊接的工艺设备。在现有技术中,大多数传统的焊枪夹具都只对焊枪具有夹持固定作用,当将传统焊枪夹具夹持固定焊枪并连接于机器人末端后,只能利用机器人位姿的变换对焊枪相对于被焊工件之间的位置进行调整,无法利用焊枪夹具对焊枪相对于被焊工件之间的位置进行调整。当机器人的自由度达到极限时,便不能控制焊枪达到预定的焊接位置;并且在焊接时,需要焊枪相对于被焊工件之间具有精确的角度及距离,如30度、45度等特定的角度,1mm、2mm、3mm等特定的距离,利用传统的焊枪夹具将很难达到精确的角度及距离,进而影响焊接结果,造成实验误差。
技术实现思路
1、本实用新型的目的在于解决现有技术中的传统焊枪夹具无法对焊枪相对于被焊工件之间的位置进行调整、无法使焊枪与被焊工件之间具有精确的角度及距离等问题。
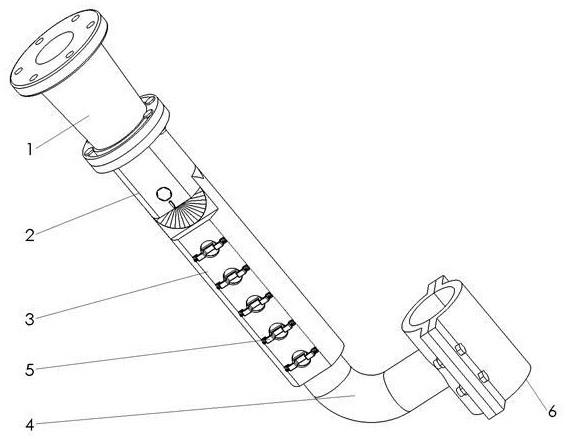
2、为解决上述技术问题,本实用新型公开了一种可调节姿态的焊枪夹具,包括主轴、旋转轴、定位轴、焊枪夹持轴、弹性部件及焊枪夹持部件。
3、其中,主轴包括固定盘、锥体及第一圆盘,固定盘、锥体和第一圆盘依次从上往下竖直一体连接;固定盘为圆柱体,固定盘上沿圆周均匀设置有第一通孔;第一圆盘为圆柱体,第一圆盘上沿圆周对称设置有第一圆弧导轨。
4、采用上述技术方案,通过在固定盘上沿圆周均匀设置有第一通孔,可用螺栓穿过第一通孔将固定盘连接于工业机器人末端,实现主轴与工业机器人末端的可拆卸连接。
5、并且,旋转轴由第二圆盘和第一圆柱体依次从上往下竖直一体连接,第二圆盘为圆柱体,第二圆盘上沿圆周对称设置有第二圆弧导轨;第一圆柱体的一端与第二圆盘的一端一体连接,第一圆柱体的另一端内部设置有圆弧形空腔;第一圆柱体上对称设置有第一平面,第一平面上设置有第二通孔;第一圆盘与第二圆盘均为圆柱体,且直径及高度尺寸均一致;第一圆弧导轨与第二圆弧导轨的内径、外径及圆角尺寸均相同;第一圆盘与第二圆盘可拆卸连接。
6、采用上述技术方案,可将主轴与旋转轴竖直布置,用螺栓穿过第一圆弧导轨和第二圆弧导轨,并用相配合的螺母固定,可实现旋转轴相对于主轴做360度旋转。
7、并且,定位轴由连接头和第二圆柱体依次从上往下竖直一体连接,连接头为扁平状圆弧,连接头上设置有第三通孔,第三通孔的半径与第二通孔的半径相同;第二圆柱体的一端与连接头的一端一体连接,第二圆柱体的另一端内部设置有圆柱体安装腔,圆柱体安装腔为连接头与第二圆柱体一体连接处往下2cm的位置开始,沿着高度方向贯穿至第二圆柱体另一端的内部圆柱体孔,该内部圆柱体孔与定位轴同轴心;第二圆柱体上对称设置有第二平面,第二平面上等距离设置有5个第四通孔,此距离为2mm;第四通孔的两侧对称设置有固定孔;连接头与圆弧形空腔的圆弧参数相同,连接头的厚度与圆弧形空腔的内部空腔厚度相同,连接头与圆弧形空腔可拆卸连接,定位轴可相对于旋转轴在同一平面内做180度旋转。
8、采用上述技术方案,可将定位轴包含的连接头与旋转轴包含的圆弧形空腔配合安装,用螺栓穿过第二通孔与第三通孔,并用相配合的螺母固定,可实现定位轴与旋转轴的可拆卸连接及定位轴相对于旋转轴在同一平面内做180度旋转。
9、并且,焊枪夹持轴由圆柱体部件和第一焊枪夹持部件一体连接;圆柱体部件与圆柱体安装腔配合安装,配合方式为间隙配合;圆柱体部件为“l”形,“l”形圆柱体部件的竖直端两侧对称等距离设置有5个半圆球凹坑,此距离为2mm,半圆球凹坑的半径与第四通孔的半径相同;“l”形圆柱体部件的竖直端能够在圆柱体安装腔内滑动;“l”形圆柱体部件的水平端与竖直布置的第一焊枪夹持部件一体连接;第一焊枪夹持部件由第一圆柱形槽和对称设置于第一圆柱形槽两侧的第三平面一体连接,第三平面上设置有第五通孔。
10、并且,弹性部件由半圆球部件与弹性板一体连接;半圆球部件的半径与半圆球凹坑的半径相同;弹性板由各段长方体板一体连接;弹性板在半圆球部件的上侧对称布置,弹性板对称的一侧为“s”形;弹性板的两侧对称设置有第六通孔,第六通孔的半径与固定孔的半径相同。
11、采用上述技术方案,可将弹性部件包含的半圆球部件安装进定位轴包含的第二平面上等距离设置的第四通孔中,将弹性部件包含的弹性板水平接触定位轴包含的第二平面,弹性板两侧对称设置的第六通孔与定位轴包含的第二平面上设置的固定孔同圆心配合,可用螺钉通过第六通孔与固定孔,将弹性部件可拆卸连接于定位轴包含的第二平面上。
12、采用上述技术方案,可将焊枪夹持轴包含的“l”形圆柱体部件的竖直端安装进圆柱体安装腔中;由于弹性部件可拆卸连接于定位轴包含的第二平面上,所以弹性部件包含的半圆球部件完全伸入到圆柱体安装腔中,由于焊枪夹持轴包含的“l”形圆柱体部件的竖直端两侧对称等距离设置有5个半圆球凹坑,且半圆球部件的半径与半圆球凹坑的半径相同,所以半圆球部件与半圆球凹坑同球心配合,弹性部件包含的半圆球部件可对安装进圆柱体安装腔中的焊枪夹持轴进行定位与可拆卸连接。
13、采用上述技术方案,将弹性部件可拆卸连接于定位轴包含的第二平面上且弹性部件包含的半圆球部件对安装进圆柱体安装腔中的焊枪夹持轴进行定位与可拆卸连接后,将焊枪夹持轴相对于定位轴进行旋转,在旋转过程中,弹性部件包含的半圆球部件被焊枪夹持轴包含的“l”形圆柱体部件的圆柱体表面顶起,半圆球部件与半圆球凹坑不再同球心配合,弹性部件包含的半圆球部件不再对安装进圆柱体安装腔中的焊枪夹持轴进行定位与可拆卸连接;然后将焊枪夹持轴在定位轴包含的圆柱体安装腔中滑动,进行距离的调整;焊枪夹持轴可在定位轴包含的圆柱体安装腔中沿着竖直方向上下滑动1个、2个或者3个半圆球凹坑之间的距离,即焊枪夹持轴可在定位轴包含的圆柱体安装腔中沿着竖直方向上下滑动2mm、4mm、6mm的距离。当焊枪夹持轴在定位轴包含的圆柱体安装腔中调整好距离后,将焊枪夹持轴相对于定位轴再次旋转,使得半圆球部件与半圆球凹坑再次同球心配合,弹性部件包含的半圆球部件再次对安装进圆柱体安装腔中的焊枪夹持轴进行定位与可拆卸连接。
14、并且,焊枪夹持部件与第一焊枪夹持部件为相同部件;焊枪夹持部件由第二圆柱形槽和对称设置于第二圆柱形槽两侧的第四平面一体连接;第四平面上设置有第七通孔。
15、进一步地,主轴内部为空心体,固定盘与锥体的大端一体连接,锥体的小端与第一圆盘体连接。
16、进一步地,旋转轴包含的第一平面上设置有螺栓安装孔,螺栓安装孔与第二通孔同轴心;第一平面下侧设置有指针,指针设置于第一平面中心线的下端,指针的箭头竖直向下。
17、采用上述技术方案,通过在旋转轴包含的第一平面上设置螺栓安装孔,当用螺栓穿过设置于旋转轴上的第二通孔与设置于连接头上的第三通孔,并用相配合的螺母固定后,可将螺栓与相配合的螺母安装进螺栓安装孔中。
18、进一步地,连接头上设置有半圆刻度盘,设置于旋转轴上的指针的箭头指向半圆刻度盘。
19、采用上述技术方案,通过在连接头上设置有半圆刻度盘,可以精确调整定位轴与旋转轴之间的角度。
20、进一步地,焊枪夹持部件与第一焊枪夹持部件的形状及所有参数一致,为相同部件;焊枪夹持部件与第一焊枪夹持部件两者同圆心配合夹持焊枪,焊枪夹持部件与第一焊枪夹持部件可拆卸连接。
21、采用上述技术方案,焊枪夹持部件与第一焊枪夹持部件同圆心配合夹持焊枪,然后用螺栓穿过第七通孔和第五通孔,用螺母将焊枪可拆卸地定位在焊枪夹持轴上。
22、进一步地,旋转轴包含的第一圆柱体的半径与定位轴包含的第二圆柱体的半径相同;第一圆柱体上对称设置的第一平面的高度与第二圆柱体上对称设置的第二平面的高度相同。
23、本实用新型的有益效果是:本实用新型公开了一种可调节姿态的焊枪夹具,包括主轴、旋转轴、定位轴、焊枪夹持轴、弹性部件以及焊枪夹持部件。通过在主轴上设置固定盘和第一圆盘及在旋转轴上设置第二圆盘,可使主轴可拆卸连接于工业机器人末端,以及使主轴与旋转轴可拆卸连接;通过在主轴的第一圆盘上设置第一圆弧导轨和旋转轴的第二圆盘上设置第二圆弧导轨,可使旋转轴相对于主轴做360度旋转。通过在旋转轴上设置圆弧形空腔及在定位轴上设置连接头,可使定位轴与旋转轴可拆卸连接,以及定位轴可相对于旋转轴在同一平面内做180度旋转;通过在旋转轴下侧设置指针及在连接头上设置半圆刻度盘,可以精确调整定位轴与旋转轴之间的旋转角度。通过在第二圆柱体的内部设置圆柱体安装腔及在定位轴包含的第二平面上设置第四通孔及固定孔,可将弹性部件可拆卸连接于定位轴上,以及将设置有半圆球凹坑的焊枪夹持轴定位在圆柱体安装腔中,焊枪夹持轴可在圆柱体安装腔中进行距离的调整。焊枪夹持部件与第一焊枪夹持部件同圆心配合夹持焊枪,对焊枪进行定位与固定。
- 还没有人留言评论。精彩留言会获得点赞!