一种可以消除焊接误差的结构的制作方法
本发明涉及新能源电池包运输,具体涉及一种可以消除焊接误差的结构。
背景技术:
1、随着世界能源危机和环保问题日益突出,作为提供新能源汽车动力来源的锂电池产业,市场潜力巨大,锂电池产品日益增多,为了紧跟自动化、智能化工厂的发展方向,包装器具也向高精度、简易化、自动化方向不断努力。
2、在电池的制造工业上一般采用物料架的形式对电池包进行装载,作为包装器具,物料架的核心功能就是稳定装载电池包,一般而言,要实现稳定装载,就需要对物模组(电池包)进行各个方向的限位。
3、物料架本身提供了对物模组的支撑功能,限位结构是附加在物料架上来提升整体的功能性的,现有的限位结构一般采用焊接方式相对物料架固定。
4、一旦焊接确定,限位结构在物料架上的安装装置便同时确定,限位作用点也确定,然而实际的生产中,物料的尺寸并不是恒定的,在生产时可以允许在标准尺寸前后一定范围的偏差,这对于物料本身的质量没有影响,但对于物料的装载存放而言这些偏差就会造成限位结构相对的焊接误差,带来难以消除的影响;限位结构所形成的限位范围大于物料尺寸时,限位失去效果,物料仍会晃动,限位结构所形成的限位范围小于物料尺寸时,物料不能卡入,限位结构无法保证连续地正常使用。
5、综合上述,消除物料架上限位结构的焊接误差以确保其在新能源电池包运输上的充分适用成为亟待解决的问题。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供一种可以消除焊接误差的结构,通过设置可滑动调整的限位结构,采用活动的精准限位方式与固定的初步定位方式有机结合,减少焊接点,消除由物料自身尺寸存在偏差带来的限位结构的焊接误差。
2、本发明的目的可以通过以下技术方案实现:
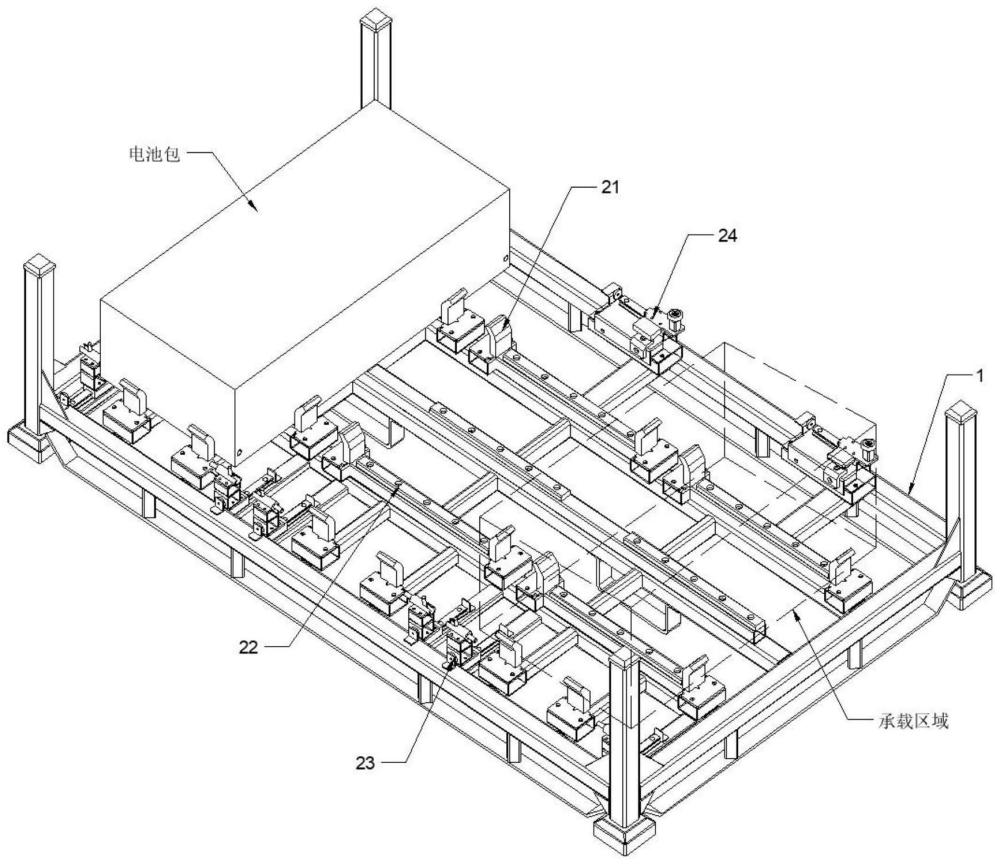
3、一种可以消除焊接误差的结构,包括框架及限位模组,框架上放置有电池包,电池包上设有盲孔及把手,限位模组包括第一限位模组、第二限位模组及第三限位模组,第一限位模组于框架上以围合姿态分布形成若干个承载区域,先将电池包放置到承载区域中初步定位,而后第二限位模组作用插接电池包内部,第三限位模组作用扣接电池包外部,进行精准定位。
4、作为本发明进一步的方案:第一限位模组构建的承载区域中设置有支撑条,进行电池包初步定位时支撑条与电池包底部挤压接触。
5、作为本发明进一步的方案:第一限位模组包括竖直部与弯折部,弯折部相对电池包侧面向外倾斜度。
6、作为本发明进一步的方案:第一限位模组及支撑条均选用聚氨酯材料。
7、作为本发明进一步的方案:第二限位模组包括插杆、弹性伸缩件、第一滑动件及第一推顶件,插杆与盲孔插接配合,弹性伸缩件与插杆连接,驱动插杆相对盲孔的插入与拔出,第一滑动件设置在插杆与框架间,进行精准定位时,通过第一滑动件移动插杆与盲孔对齐,在插杆插入盲孔后,第一推顶件施加与插杆插入方向垂直的作用力,锁定插杆与盲孔的定位。
8、作为本发明进一步的方案:弹性伸缩件包括套管、压头及弹簧,套管滑动套接插杆上,压头固定在插杆伸入套管一端上,弹簧设置在压头与套管间,当需要解除插杆对盲孔的锁定时,拨动压头牵引插杆向套管中滑动,弹簧拉长,当重新进行定位时,松开压头,弹簧缩回,将插杆重新顶入盲孔中。
9、作为本发明进一步的方案:第三限位模组包括压合件、第二滑动件及第二推顶件,压合件与把手扣接配合,第二滑动件设置在压合件与框架间,进行精准定位时,通过第二滑动件驱动压合件压紧把手,在压合件压紧把手后,第二推顶件施加与压合件方向垂直的作用力,锁定压合件对把手的扣接状态。
10、作为本发明进一步的方案:压合件包括固定板、活动板及角块,活动板相对固定板可滑动,角块与活动板竖直向错开设置,角块与活动板错开的空间构成供把手进入的扣接区域,活动板滑动下压闭合扣接区域以对把手进行定位。
11、作为本发明进一步的方案:固定板上固定有导杆,滑动板上开设有与导杆滑动配合的导孔。
12、作为本发明进一步的方案:第一推顶件包括强磁块及磁吸部,强磁块固定在框架上,与磁吸部间形成磁吸配合,向第一滑动件作用提供动力。
13、本发明的有益效果:
14、本发明装载电池包后,既可以作为对电池包的长途运输使用,也可以用于在生产车间进行电池包的周转;
15、进行初步定位时采用固定的防护结构,提供电池包的安置范围,在此基础上再进行精准定位,第二限位模组及第三限位模组内与电池包接触的精准定位部位均具有一定的活动范围,再辅以特定的锁定机制,在确保定位的稳定效果的同时,使得限位结构可以适应物料生产时存在一定范围偏差的情况,从根源上减少了焊接点,解决了现有限位结构存在焊接误差的弊端。
技术特征:
1.一种可以消除焊接误差的结构,其特征在于,包括:
2.根据权利要求1所述的一种可以消除焊接误差的结构,其特征在于,所述第一限位模组(21)构建的承载区域中设置有支撑条(22),进行电池包初步定位时所述支撑条(22)与电池包底部挤压接触。
3.根据权利要求1所述的一种可以消除焊接误差的结构,其特征在于,所述第一限位模组(21)包括竖直部与弯折部,所述弯折部相对电池包侧面向外倾斜30度。
4.根据权利要求2所述的一种可以消除焊接误差的结构,其特征在于,所述第一限位模组(21)及支撑条(22)均选用聚氨酯材料。
5.根据权利要求1所述的一种可以消除焊接误差的结构,其特征在于,所述第二限位模组(23)包括:
6.根据权利要求5所述的一种可以消除焊接误差的结构,其特征在于,所述弹性伸缩件(232)包括:
7.根据权利要求1所述的一种可以消除焊接误差的结构,其特征在于,所述第三限位模组(24)包括;
8.根据权利要求7所述的一种可以消除焊接误差的结构,其特征在于,所述压合件(241)包括:
9.根据权利要求8所述的一种可以消除焊接误差的结构,其特征在于,所述固定板上固定有导杆,滑动板上开设有与导杆滑动配合的导孔。
10.根据权利要求5所述的一种可以消除焊接误差的结构,其特征在于,所述第一推顶件(234)包括强磁块及磁吸部,所述强磁块固定在框架(1)上,与磁吸部间形成磁吸配合,向第一滑动件(233)作用提供动力。
技术总结
本发明公开了一种可以消除焊接误差的结构,包括框架及限位模组,框架上放置有电池包,电池包上设有盲孔及把手,限位模组包括第一限位模组、第二限位模组及第三限位模组,第一限位模组于框架上以围合姿态分布形成若干个承载区域,进行初步定位时采用固定的防护结构,提供电池包的安置范围,在此基础上再进行精准定位,第二限位模组及第三限位模组内与电池包接触的精准定位部位均具有一定的活动范围,再辅以特定的锁定机制,在确保定位的稳定效果的同时,使得限位结构可以适应物料生产时存在一定范围偏差的情况,从根源上减少了焊接点,解决了现有限位结构存在焊接误差的弊端。
技术研发人员:肖宗欣,孙启才,施荣,赵刚
受保护的技术使用者:富日供应链科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!