机器人手臂激光焊接机的制作方法
本申请涉及激光焊接领域,特别涉及机器人手臂激光焊接机。
背景技术:
1、机器人手臂激光焊接机是一种将激光焊接头集成于机器人手臂上的机械设备,通过机器人手臂操控激光焊接头灵活移动,进行激光焊接操作,可以有效提升激光焊接操作的便捷性,有利于提升激光焊接加工的效率。
2、现有技术中的机器人手臂激光焊接机大多仅装载有单个激光焊接头,在进行激光焊接时,单个激光焊接头独自运行,受其焊接时的移动速度影响,其焊接效率难以提升,并且单个激光焊接头的操作模式通常较为单一,虽然可以适用于大多数工件缝隙的激光焊接加工,保障了其焊接加工的普遍适用性,但是单一的焊接加工模式下,同样难以提升激光焊接的效率,最终导致激光焊接机的整体工作效率难以大幅度提升。
3、为此,提出一种机器人手臂激光焊接机来解决上述现有技术中存在的一些问题。
技术实现思路
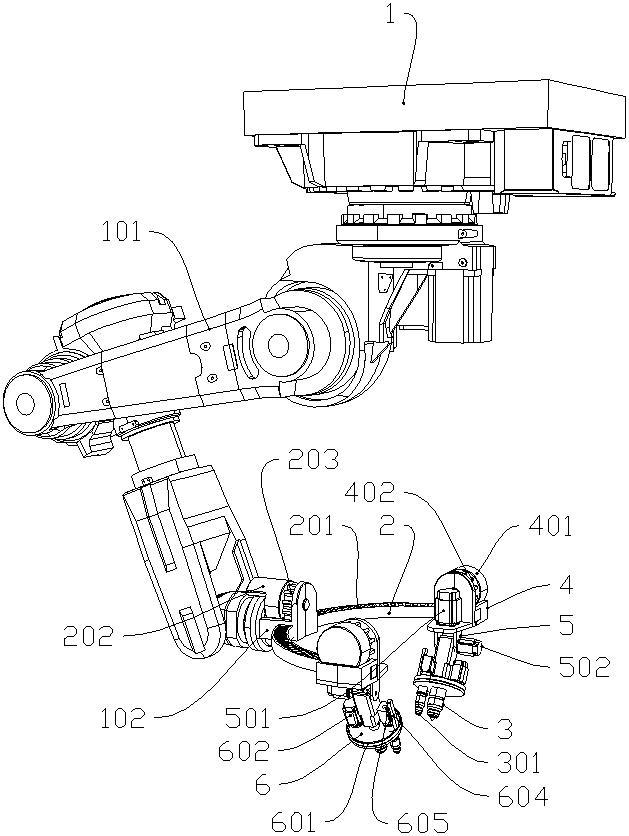
1、本申请目的在于提升机器人手臂激光焊接机使用过程中的焊接效率和焊接操作多样性,相比现有技术提供机器人手臂激光焊接机,包括基座,基座设置于上方,基座的底部转动安装有机械臂,且机械臂的末端连接有位于基座下方的承载台,承载台上安装有为圆弧形结构设置的杆架,承载台位于杆架的中间位置,杆架的两端均安装有激光焊接头。
2、进一步,杆架活动穿插于承载台内部,杆架的顶部均匀镶嵌有齿槽,承载台的顶部固定安装有伺服电机a,且伺服电机a的驱动轴上固定安装有与齿槽相啮合的齿轮a。
3、进一步,激光焊接头的外侧安装有与其平行设置的高温喷枪,且高温喷枪位于激光焊接头移动方向前方。
4、进一步,杆架前后两端外侧均滑动套接有滑动座,且滑动座上固定安装有伺服电机b,伺服电机b的驱动轴上固定安装有与齿槽相啮合的齿轮b。
5、进一步,滑动座上安装有轴架,激光焊接头转动安装于轴架内,轴架上固定安装有用于驱动激光焊接头旋转摆动的伺服电机d。
6、进一步,轴架转动安装于滑动座上,滑动座上固定安装有与轴架传动连接的伺服电机c,轴架的旋转方向与激光焊接头的摆动方向相垂直。
7、进一步,激光焊接头的外侧转动安装有圆盘,且圆盘与激光焊接头同轴设置,高温喷枪安装于圆盘上,圆盘的顶部固定安装有与其同轴设置的齿环,激光焊接头的外端壁上固定安装有伺服电机e,且伺服电机e的驱动轴上固定安装有与齿环相啮合的齿轮c。
8、进一步,激光焊接时,轴架的转速与圆盘的转速相同,轴架的转向与圆盘的转向相反。
9、进一步,圆盘的顶部竖直固定有电磁导轨,且电磁导轨上滑动连接有电磁滑座,高温喷枪滑动穿插于圆盘内,高温喷枪的顶端与电磁滑座固定连接。
10、进一步,滑动座的底部固定安装有朝向激光焊接头设置的抽气口,且抽气口外接抽尘器。
11、相比于现有技术,本申请的优点在于:
12、(1)本申请通过将杆架安装于机械臂的末端,并将两个激光焊接头设置于杆架的两端,可以在同一时间对同一缝隙进行两处焊接加工,有利于大幅度缩短激光焊接所需的时长,进而有效提升了焊接效率,同时,通过将杆架设置为圆弧形结构,并将机械臂与基座转动连接,配合机械臂的倒置设置,使得该装置不仅可以适用于直线缝隙的激光焊接,同样还适用于圆弧形缝隙的焊接加工,有利于进一步提升该装置的适用范围。
13、(2)通过将杆架活动穿插于承载台内,并借助齿轮a和齿槽的啮合,配合伺服电机a进行驱动,可以根据使用需求灵活调节杆架相对于承载台的位置关系,灵活切换单激光焊接头运行或者双激光焊接头运行模式,且在单激光焊接头运行状态下可以借助杆架对焊接操作进行延伸,有利于提升该装置在狭窄空间内进行激光焊接的操作便捷性。
14、(3)通过设置有高温喷枪,可以在进行激光焊接前,通过炙烤清除焊接缝隙位置表面的油污,并通过高温炙烤预热提升待焊接位置周边的温度,有利于降低在通过激光焊接头进行激光焊接时,待焊接缝隙周边温度骤然升高而出现火花碎屑肆意飞溅的概率,有效保障了使用该装置进行激光焊接的稳定性。
15、(4)通过将滑动座活动套接于杆架外侧,并通过伺服电机b驱动齿轮b旋转,借助齿轮b与齿槽的啮合,在焊接加工时灵活调节两个杆架的相对位置关系,配合通过伺服电机c驱动轴架旋转,通过伺服电机d驱动轴架上的激光焊接头旋转,对激光焊接头的姿态进行调整,有利于实现该装置多模式激光焊接的灵活切换,提升了该装置的使用灵活性和适用性。
16、(5)通过将圆盘转动套接于激光焊接头的外侧,并借助齿环和齿轮c的啮合,配合伺服电机e进行旋转驱动,有利于实现对圆盘上高温喷枪的灵活调整,同时,通过将电磁导轨竖直固定于圆盘上,并将高温喷枪与电磁导轨上滑动连接的电磁滑座固定连接,可以通过电磁滑座在电磁导轨上的滑动,对高温喷枪距离焊接缝隙的实际距离进行调整,从而灵活改变待焊机缝隙预热时的实际受热效果,有效提升了该装置使用过程中的灵活性。
技术特征:
1.机器人手臂激光焊接机,包括设置于上方的基座(1),其特征在于:
2.根据权利要求1所述的机器人手臂激光焊接机,其特征在于:所述杆架(2)活动穿插于承载台(102)内部,所述杆架(2)的顶部均匀镶嵌有齿槽(201),所述承载台(102)的顶部固定安装有伺服电机a(202),且伺服电机a(202)的驱动轴上固定安装有与齿槽(201)相啮合的齿轮a(203)。
3.根据权利要求1所述的机器人手臂激光焊接机,其特征在于:所述激光焊接头(3)的外侧安装有与其平行设置的高温喷枪(301),且高温喷枪(301)位于激光焊接头(3)移动方向前方。
4.根据权利要求3所述的机器人手臂激光焊接机,其特征在于:所述杆架(2)前后两端外侧均滑动套接有滑动座(4),且滑动座(4)上固定安装有伺服电机b(401),所述伺服电机b(401)的驱动轴上固定安装有与齿槽(201)相啮合的齿轮b(402)。
5.根据权利要求4所述的机器人手臂激光焊接机,其特征在于:所述滑动座(4)上安装有轴架(5),所述激光焊接头(3)转动安装于轴架(5)内,所述轴架(5)上固定安装有用于驱动激光焊接头(3)旋转摆动的伺服电机d(502)。
6.根据权利要求5所述的机器人手臂激光焊接机,其特征在于:所述轴架(5)转动安装于滑动座(4)上,所述滑动座(4)上固定安装有与轴架(5)传动连接的伺服电机c(501),所述轴架(5)的旋转方向与激光焊接头(3)的摆动方向相垂直。
7.根据权利要求6所述的机器人手臂激光焊接机,其特征在于:所述激光焊接头(3)的外侧转动安装有圆盘(6),且圆盘(6)与激光焊接头(3)同轴设置,所述高温喷枪(301)安装于圆盘(6)上,所述圆盘(6)的顶部固定安装有与其同轴设置的齿环(601),所述激光焊接头(3)的外端壁上固定安装有伺服电机e(602),且伺服电机e(602)的驱动轴上固定安装有与齿环(601)相啮合的齿轮c(603)。
8.根据权利要求6所述的机器人手臂激光焊接机,其特征在于:激光焊接时,所述轴架(5)的转速与圆盘(6)的转速相同,所述轴架(5)的转向与圆盘(6)的转向相反。
9.根据权利要求7所述的机器人手臂激光焊接机,其特征在于:所述圆盘(6)的顶部竖直固定有电磁导轨(604),且电磁导轨(604)上滑动连接有电磁滑座(605),所述高温喷枪(301)滑动穿插于圆盘(6)内,所述高温喷枪(301)的顶端与电磁滑座(605)固定连接。
10.根据权利要求9所述的机器人手臂激光焊接机,其特征在于:所述滑动座(4)的底部固定安装有朝向激光焊接头(3)设置的抽气口,且抽气口外接抽尘器。
技术总结
本发明提供了应用于激光焊接领域的机器人手臂激光焊接机,包括基座、机械臂、圆弧形的杆架和两个位于杆架两端的激光焊接头,本申请通过将杆架安装于机械臂的末端,并将两个激光焊接头设置于杆架的两端,可以在同一时间对同一缝隙进行两处焊接加工,有利于大幅度缩短激光焊接所需的时长,进而有效提升了焊接效率,同时,通过将杆架设置为圆弧形结构,并将机械臂与基座转动连接,配合机械臂的倒置设置,使得该装置不仅可以适用于直线缝隙的激光焊接,同样还适用于圆弧形缝隙的焊接加工,有利于进一步提升该装置的适用范围。
技术研发人员:张安明,张安国
受保护的技术使用者:山东光之聚激光科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!