压力检测系统的制作方法
1.本发明实施例涉及半导体领域,特别涉及一种压力检测系统。
背景技术:
2.化学机械抛光工艺是在化学以及机械作用下进行研磨。在研磨过程中需要对研磨量进行控制,其中的要素包括控制研磨手臂的下压力,下压力会直接影响研磨过程中的研磨速率以及颗粒的聚集程度。因此,精准控制下压力尤为重要。
技术实现要素:
3.本发明实施例提供一种压力检测系统,有利于检测研磨手臂施加于受力层的压力的均衡性。
4.为解决上述问题,本发明实施例提供一种压力检测系统,包括:研磨手臂与受力层,所述受力层用于承受所述研磨手臂的压力;基底和多个弹性体,多个所述弹性体固定于所述受力层和所述基底之间;形变传感器,用于检测所述弹性体的形变量;分析装置,用于根据所述形变传感器的检测结果以及所述弹性体的弹性系数获取所述受力层所承受的压力。
5.另外,压力检测系统还包括研磨盘,固定于所述研磨手臂上,所述研磨手臂通过所述研磨盘向所述受力层施加压力。
6.另外,所述受力层包括研磨垫。
7.另外,所述弹性体的个数大于等于3。
8.另外,所述受力层具有受力中心,在平行于所述受力层顶面的方向上,至少两个所述弹性体与所述受力中心的间距相等。
9.另外,所述受力层内具有凹槽,所述凹槽用于容纳校正砝码,所述凹槽的中心为所述受力中心。
10.另外,所述分析装置还用于根据不同所述弹性体的形变量差值调整所述研磨手臂的平面位置和朝向。
11.另外,在垂直于所述受力层表面的方向上,所述弹性体的正投影位于所述研磨盘的正投影内。
12.另外,多个所述弹性体的规格相同。
13.与现有技术相比,本发明实施例提供的技术方案具有以下优点:
14.上述技术方案中,在受力层与基底之间设置多个弹性体,并通过多个弹性体测量研磨手臂施加于受力层不同位置的压力,进而可根据受力层不同位置所承受的压力来表征研磨手臂施加于受力层的压力的均衡性。
15.另外,弹性体的中心轴线穿过受力中心,使得弹性体对受力中心的受力情况进行测量,如此,有利于更为详细地构建受力层受力面的受力示意图,受力示意图包含受力层不同位置所承受的压力情况。
附图说明
16.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,除非有特别申明,附图中的图不构成比例限制。
17.图1为一种压力检测系统的结构示意图;
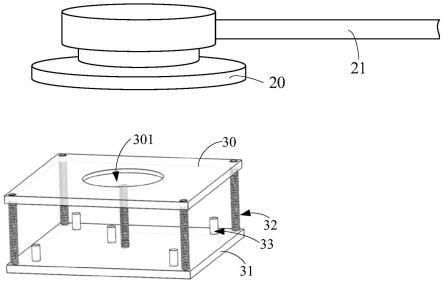
18.图2为本发明实施例提供的一种压力检测系统的结构示意图。
具体实施方式
19.图1为一种压力检测系统的结构示意图。
20.参考图1,压力传感器12安装在研磨手臂11上,在机台设定下压力之后,研磨手臂11带动压力传感器12作用在受力装置13上,受力装置13通过反作用力反馈给压力传感器12,以使压力传感器12获取研磨手臂11的当前压力。
21.现有技术中,在安装压力传感器12之前,需要先拆除实际研磨过程中需要使用到的安装在研磨手臂11上的研磨盘,再通过磁吸等方式将压力传感器12安装在研磨手臂11上。此时,压力传感器12获取到的压力仅包括机台设定并通过研磨手臂11施加的压应力,而不包括研磨盘的自重,这就使得压力传感器12获取到的压力并非实际研磨过程中研磨对象受到的压力,进而导致机台无法根据压力传感器12获取的数值准确监控并调节研磨对象在实际研磨过程中受到的压力。
22.同时,为保证压力传感器12数据的有效传输,压力传感器12的信号线需要连接至解析装置上,而由于压力传感器12固定于研磨手臂11上,研磨手臂11在实际研磨步骤中需要上下运动,这就导致信号线会随着研磨手臂11上下运动,上下运动可能导致信号线出现内部损坏或接触不良等问题,进而使得检测数据因为内部损坏以及接触不良出现偏差。
23.此外,目前的压力传感器12通常仅将受力装置13反馈的最大反作用力记为研磨手臂11施加的压力,而不呈现研磨手臂11施加于受力装置13上的压力的分布情况。在极端情况下,研磨盘与研磨对象的研磨盘之间可能具有一定倾斜角度,此时,即便研磨手臂11提供的压力和研磨盘的自重之和等于预设的研磨压力,也得不到预设的研磨结果。
24.为解决上述问题,本发明实施例提供一种压力检测系统,在受力层与基底之间设置多个弹性体,并通过多个弹性体测量研磨手臂施加于受力层不同位置的压力,进而可根据受力层不同位置所承受的压力来表征研磨手臂施加的压力的均衡性。
25.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施例进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施例中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施例的种种变化和修改,也可以实现本技术所要求保护的技术方案。
26.图2为本发明实施例提供的一种压力检测系统的结构示意图。
27.参考图2,压力检测系统包括:研磨手臂21与受力层30,受力层30用于承受研磨手臂21的压力;基底31和多个弹性体32,多个弹性体32固定于受力层30和基底31之间;形变传感器33,用于检测弹性体32的形变量;分析装置(未图示),用于根据形变传感器33的检测结果以及弹性体32的弹性系数获取受力层30所承受的压力。
28.本实施例中,压力检测系统还包括:研磨盘20,固定于研磨手臂21上,研磨手臂21通过研磨盘20向受力层30施加压力。由于弹性体32安装于受力层30与基底31之间,因此研
磨盘20可安装于研磨手臂21上,研磨手臂21可带动研磨盘20共同向受力层30施加压力,弹性体32可测量出研磨手臂21施加的压力以及研磨盘20的自重之和,如此,弹性体32的测量结果更接近于实际研磨过程中研磨对象所承受的压力,保证在实际研磨过程中,研磨对象具有较好的研磨结果。
29.本实施例中,形变传感器33的信号线通过基底31固定。由于基底31在研磨过程中不发生移动,通过基底31固定信号线,有利于保证信号线具有良好的稳定性以及较优的性能,进而保证形变传感器33能够准确获取弹性体32的形变量,同时使得分析装置能够根据弹性体32的形变量准确获取研磨手臂21施加的应力和研磨盘20的自重之和。
30.本实施例中,受力层的实际指代根据应用场景有所不同。具体地,在实际研磨过程中,受力层30一般为研磨垫,研磨对象一般为晶圆;在压力检测系统的测试过程中,受力层30还可以是测试结构的受力面,即通过测试结构来模拟研磨垫,以确保应用于实际研磨过程的压力检测系统的参数的准确性。
31.以下将以受力层30为测试结构的受力面进行示例性说明。具体如下:
32.本实施例中,弹性体32的个数大于等于3,例如4。弹性体32的个数越多,弹性体32就能检测出受力层30表面更多位置的受压情况,而由于三点才能限定一个面,因此弹性体32的个数需要大于等于3,分析装置才能够推算出受力层30整个表面的受压情况,以表征实际研磨过程中研磨对象的受压面的受压情况,以及判断研磨对象的受压均衡性。
33.当弹性体32的个数小于3时,分析装置只能获取受力层30表面一条直线路径上的或者局部点状区域内的受力情况;此外,研磨对象的受压均衡性可通过受力层30表面不同位置之间的最大压力差来表征,或者通过受压面的受压力的方差等参数进行表征。
34.当弹性体32的个数为3时,弹性体32可以呈三角分布,以较好地支撑受力层30;本实施例中,弹性体32的个数为大于等于4,4个弹性体32围成一个矩形,以稳定支撑受力层30。
35.本实施例中,受力层30具有受力中心,在平行于受力层30顶面的方向上,至少两个弹性体32与受力中心的间距相等。受力中心指的是受力层30的受力面的中心,理想情况下,受力面中任意两个位置的受力相等;而当研磨手臂21的压力主要集中于受力中心时,受力面不同位置的受力应当遵循等距相等原则,即与受力中心间距相等的不同位置的受力大小相同,如此,可通过对比距离受力中心间距相等的不同位置的弹性体32的形变量,获取受力层30的受力均衡性。
36.其中,至少以下两种情况可能导致受力层30的受力均衡性较差:第一,研磨手臂21向受力层30施加压力时,自身发生了偏移,导致受力层30的实际受力面的中心并非预设的受力中心;第二,研磨盘20与受力层30之间存在一定倾斜角度,导致研磨手臂21和研磨盘20向受力层30施加的压力集中于受力中心的一侧。
37.当受力层30所承受的压力的均衡性不满足预设要求时,可认为在实际研磨过程中,研磨对象的受力均衡性可能也无法满足预设要求,因此需要通过形变传感器33反馈的参数对机台、研磨手臂21或研磨盘20进行调整。
38.本实施例中,受力层30内具有凹槽301,凹槽301用于容纳校正砝码,凹槽301的中心为受力中心,以避免凹槽301的设置使得受力层30的重心发生偏移。在受力层30受压的情况下,可通过在凹槽301内任意位置放置任意重量的校正砝码,控制受力层30具有较好的受
力均衡性,以及使得受力层30承受预设的压力,进而可根据校正砝码的位置和重量对研磨手臂21的压力和位置,以及研磨盘20的重量和角度进行调整,以使机台设定的压力和研磨盘20自重之和等于研磨对象所需的研磨压力,避免实际压力大于或小于所需的研磨压力,以及使得受力层30的受力均衡性较高。
39.此外,由上可知,受力层30所承受的压力的均衡性还体现在与受力中心间距不等的不同位置的受力是否相等,当受力不等时,可认为研磨盘20与受力层30表面并未贴合,导致受力层30局部区域表面并未受力。
40.本实施例中,在垂直于受力层30表面的方向上,弹性体32的正投影位于研磨盘32的正投影内。如此,在进行受力推算时,分析装置具有数量更多的能够反映真实应力情况的数据锚点,有利于更为准确地推算出受力面内其他区域的受力情况。
41.本实施例中,凹槽301的直径小于研磨盘20的直径,凹槽301仅用于容纳校正砝码;在其他实施例中,凹槽的直径大于研磨盘的直径,研磨盘和校正砝码可一同放入凹槽内,在垂直于受力层表面的方向上,至少部分弹性体的正投影位于研磨盘的正投影之外。其中,校正砝码既可以是标准砝码,也可以是根据实际需要定制的砝码。
42.本实施例中,弹性体32的中心轴线穿过受力中心,即弹性体32还位于受力中心与基底30之间。
43.在分析装置对受力层30的受力情况进行推算时,进一步获取受力中心的受力情况,可对受力中心与受力边缘之间的受力情况进行更为有效的推算,以提高推算结果的准确性。
44.本实施例中,分析装置还用于根据不同弹性体32的形变量差值调整研磨手臂21的平面位置和朝向。调整研磨手臂21的平面位置用于保证,在垂直于受力层30表面的方向上,研磨盘20朝向受力层30的表面的中心与预设的受力中心处于同一轴线内;调整研磨手臂21的朝向,用于保证研磨盘20与受力层30表面贴合,避免两者之间出现超过误差允许范围的倾斜角度,保证受力层30的实际受力面具有较好的受力均衡性。
45.本实施例中,多个弹性体32的规格相同,具体为长度以及弹性系数相同。如此,有利于保证相同压力作用下,不同弹性体32的形变量相同和反弹力相同,从而保证研磨盘20可对研磨对象不同区域进行相同程度的研磨,避免因按压松紧程度不同导致的磨耗量差异。
46.其中,弹性体32可以为最大弹力为15n的弹簧,形变传感器33可以为激光传感器,弹性体32的最大弹力可以根据研磨对象的需求以及具体研磨工艺进行调整。
47.本实施例中,在研磨手臂21向受力层30施加压力之前,需要将形变传感器33的测量值调为零,以避免受力层30自重对检测结果造成影响。
48.本实施例中,在受力层与基底之间设置多个弹性体,并通过多个弹性体测量研磨手臂施加于受力层不同位置的压力,进而可根据受力层不同位置所承受的压力来表征研磨手臂施加的压力的均衡性。
49.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各自更动与修改,因此本发明的保护范围应当以权利要求限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1