用于在真空处理系统中移动装置的运输系统、包括其的基板处理系统以及操作运输系统的方法与流程
1.本公开内容的实施方式涉及用于运输载体的设备和方法,特别是用于在处理期间承载基板或掩模的载体。更具体地,本公开内容的实施方式涉及用于在采用磁悬浮的真空处理系统中运输载体的设备和方法。
背景技术:
2.用于在基板上进行层沉积的技术包括例如溅射沉积、物理气相沉积(pvd)、化学气相沉积(cvd)和热蒸发。被涂覆的基板可用于若干应用和若干技术领域中。例如,被涂覆的基板可用于显示装置的领域中。显示装置可用于制造电视机屏幕、计算机显示器、移动电话、其他手持装置等来显示信息。典型地,显示器通过使用不同材料的层堆叠涂覆基板来生产。
3.为了沉积层堆叠,可使用处理模块的直列(in-line)布置。直列处理系统包括多个处理模块(诸如沉积模块)以及任选的另外的处理模块(诸如清洁模块和/或蚀刻模块),其中处理方面随后在处理模块中进行,使得多个基板可在直列处理系统中连续地或准连续地进行处理。
4.基板可由载体(即,用于在真空系统中承载基板的承载装置)承载。典型地使用运输系统来将承载基板的载体运输通过真空系统。在基板处理期间(特别是用于显示器制造)的主要挑战是避免产生颗粒。为了减少颗粒产生,已经提出磁悬浮系统,使得可基本上无接触地运输载体。
5.然而,真空环境中的磁运输系统是有挑战性的,因为运输系统的许多机械和电气部件不支持真空。例如,在真空环境中提供电磁体可能导致大脱气率和处理系统污染。
6.因此,需要提供克服了现有技术中的问题中的至少一些的(特别是用于真空处理系统的)用于运输装置(诸如载体)的改善的系统和方法。
技术实现要素:
7.鉴于以上内容,提供了根据独立权利要求的用于在真空处理系统中移动装置的运输系统、基板处理系统以及操作用于在真空处理系统中移动装置的运输系统的方法。另外的方面、优点和特征从从属权利要求、描述和附图中显而易见。
8.根据本公开内容的一个方面,提供了一种用于在真空处理系统中移动装置的运输系统。所述运输系统包括驱动单元,所述驱动单元包括外壳,所述外壳包围具有一个或多个电磁体的内部空间。另外,所述运输系统包括真空系统,所述真空系统与所述外壳的所述内部空间连接。
9.根据本公开内容的另一方面,提供了一种基板处理系统。所述基板处理系统包括:真空处理腔室;处理装置,所述处理装置设置在所述真空处理腔室中;基板载体,所述基板载体用于承载基板;以及运输系统,所述运输系统用于运输所述基板载体。所述运输系统包
括驱动单元,所述驱动单元包括外壳,所述外壳包围具有一个或多个电磁体的内部空间。另外,所述运输系统包括真空系统,所述真空系统与所述外壳的所述内部空间连接,以及与所述真空处理腔室的内部空间连接。
10.根据本公开内容的另一方面,提供了一种操作用于在真空处理系统中移动装置的运输系统的方法。所述方法包括在所述真空处理系统的真空腔室中施加具有第一真空压力p1的第一真空。另外,所述方法包括在驱动单元的外壳中施加具有第二真空压力p2的第二真空。所述驱动单元的所述外壳包围具有一个或多个电磁体的内部空间。另外,所述方法包括通过采用所述驱动单元来移动所述装置。
11.实施方式还涉及用于实行所公开的方法的装置并且包括用于执行每个描述的方法方面的装置部件。这些方法方面可借助于硬件部件、由适当软件编程的计算机、这两者的任何组合或以任何其他方式执行。此外,根据本公开内容的实施方式还涉及用于操作所描述的装置的方法。用于操作所描述的装置的方法包括用于实行所述装置的每一功能的方法方面。例如,根据本公开内容的另一方面,提供了一种(特别是用于制造电子装置的)涂覆基板的方法。电子装置可以是光电装置,例如显示器。所述涂覆基板的方法包括使用根据本文描述的任何实施方式的运输系统、根据本文描述的任何实施方式的基板处理系统和根据本文描述的任何实施方式的操作用于在真空处理系统中移动装置的运输系统的方法中的至少一个。
附图说明
12.为了可详细地理解本公开内容的上述特征,可参考实施方式来得到以上简要地概述的本公开内容的更具体的描述。附图涉及本公开内容的实施方式并且描述如下:
13.图1示出了根据本文描述的实施方式的运输系统的示意图;
14.图2示出了根据本文描述的另外的实施方式的具有要被运输的装置的运输系统的示意图;
15.图3示出了根据本文描述的实施方式的具有另外的任选特征的运输系统的示意图;
16.图4示出了根据本文描述的实施方式的包括真空腔室的运输系统的示意图;
17.图5示出了根据本文描述的实施方式的基板处理系统的示意图;并且
18.图6示出了用于说明根据本文描述的实施方式的操作用于在真空处理系统中移动装置的运输系统的方法的流程图。
具体实施方式
19.现将详细地参考本公开内容的各种实施方式,这些实施方式的一个或多个示例示出于各图中。在以下对附图的描述中,相同的附图标记是指相同的部件。仅描述了相对于单独的实施方式的差异。每个示例是作为对本公开内容的解释而提供的,并且不意指对本公开内容的限制。另外,被示出或描述为一个实施方式的部分的特征可在其他实施方式上或结合任何其他实施方式使用,以产生又一个实施方式。说明书旨在包括此类修改和变化。
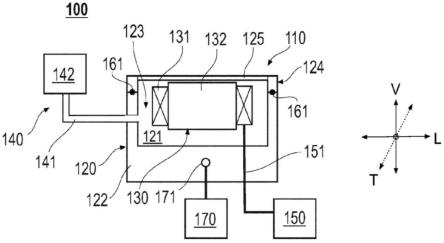
20.示例性地参考图1,描述了根据本公开内容的用于在真空处理系统中移动装置10的运输系统100。例如,装置10可以是载体、特别是基板载体或掩模载体。然而,应当理解,如
本文所描述的运输系统100也可用于真空处理系统中所采用的其他装置,例如处理装置,诸如沉积源。
21.装置10可由运输系统100在运输方向t上移动,如图1示例性指示的。在图1中,运输方向t垂直于纸面。运输方向t典型地是基本上水平的方向(水平+/-10
°
)。在本公开内容中,术语“运输方向”可被理解为装置由运输系统沿运输路径运输的方向。运输路径可以是线性的或弯曲的。另外,运输方向可沿运输路径变化。另外,在图1中,指示了竖直方向v和侧向方向l。
22.根据可与本文描述的任何其他实施方式结合的实施方式,运输系统100包括驱动单元110,如图1示例性示出的。驱动单元110包括外壳120。外壳120包围内部空间121。如图1示意性示出的,一个或多个电磁体130设置在内部空间121中。另外,运输系统100包括真空系统140。真空系统140与外壳120的内部空间121连接。因此,应当理解,能够通过使用真空系统140在外壳120的内部中产生真空。
23.因此,与现有技术相比,本文描述的运输系统的实施方式在真空兼容性方面得到改善。特别是,通过提供具有在其中能够提供真空的驱动单元的运输系统,可减小在驱动单元外壳内部与驱动单元外壳外部之间的压力差。因此,驱动单元外壳、特别是驱动单元外壳的覆盖电磁体的部分的应力和弹性变形可减小,使得与现有技术相比,驱动单元外壳壁、特别是覆盖电磁体的部分可设计成具有更小厚度。因此,可提高驱动单元的驱动效率,特别是在真空环境中。
24.在更详细地描述本公开内容的各种另外的实施方式之前,说明与本文使用的一些术语和表达有关的一些方面。
25.在本公开内容中,“用于移动装置的运输系统”可被理解为被配置为在运输方向t上沿运输路径移动(特别是运输)装置的系统或设备。特别地,运输系统可被配置为运输基本上竖直取向的装置。如本文所使用的“基本上竖直”可涵盖与完全竖直取向的10
°
或更小的偏差。更具体地,可由运输系统移动的装置可以是载体。因此,用于移动装置的运输系统可以是用于在运输方向t上沿运输路径移动(特别是运输)载体的载体运输系统。
26.在本公开内容中,“载体”可被理解为被配置为承载对象(例如,基板或掩模)通过真空环境的承载装置。特别地,载体可以是在处理系统中使用的基板载体或掩模载体,例如,用于竖直处理基板。载体可包括载体主体和被配置为将对象(例如,基板或掩模)保持在该载体主体的对象支撑表面处的保持装置(例如,机械、静电或磁性夹持装置)。载体可被配置为承载大面积基板,即,具有1m2或更大、特别是5m2或更大或甚至是8m2或更大的基板。运输和保持大且重的载体是有挑战性的,特别是使用磁悬浮时。
27.在本公开内容中,术语“基板”可特别地涵盖基本上非柔性的基板,例如晶片、透明晶体(诸如蓝宝石等)的切片或玻璃板。然而,本公开内容不限于此,并且术语“基板”还可涵盖柔性基板(诸如卷材或箔)。术语“基本上非柔性”应当被理解为区分于“柔性”。特别地,基本上非柔性的基板可具有一定程度的柔性,例如具有0.5mm或更低的厚度的玻璃板,其中与柔性基板相比,基本上非柔性的基板的柔性很小。根据本文描述的实施方式,基板可由适于材料沉积的任何材料制成。例如,基板可由从由以下项组成的组中选择的材料制成:玻璃(例如,钙钠玻璃、硼硅玻璃等)、金属、聚合物、陶瓷、化合物材料、碳纤维材料或可通过沉积工艺涂覆的任何其他材料或材料组合。
28.如上所述,装置10可以是基板载体或掩模载体。特别地,载体可以是用于大面积基板的基板载体或用于掩模的掩模载体,该掩模用于掩蔽大面积基板。在本公开内容中,术语“大面积基板”是指具有面积为0.5m2或更大、特别是1m2或更大的主要表面的基板。在一些实施方式中,大面积基板可以是第4.5代(其对应于约0.67m2基板(0.73m
×
0.92m))、第5代(其对应于约1.4m2基板(1.1m
×
1.3m))、第7.5代(其对应于约4.29m2基板(1.95m
×
2.2m))、第8.5代(其对应于约5.7m2基板(2.2m
×
2.5m)),或者甚至第10代(其对应于约8.7m2基板(2.85m
×
3.05m))。可类似地实现甚至更高的世代(诸如第11代和第12代)和对应的基板面积。
29.图2示出了与要运输的装置10结合的运输系统100。特别地,驱动单元110可布置在要运输的装置10下方。示例性参考图2,根据可与本文描述的任何其他实施方式结合的实施方式,运输系统100还包括用于非接触地悬浮装置10(例如载体,特别是基板载体或掩模载体)的磁悬浮单元190。参考图5示例性描述了其中装置10是基板载体230的示例性实施方式。特别地,磁悬浮单元190被配置为将装置10保持在装置运输空间中。装置运输空间可被理解为在沿运输路径在运输方向t上运输装置期间布置有装置的区域。典型地,磁悬浮单元190布置在装置运输空间上方。特别地,如图2示例性所示,磁悬浮单元190被布置成与装置10的一个或多个第一磁对应件181相互作用。因此,一个或多个第一磁对应件181可布置在装置10的顶部部分处。如图2示例性所示,磁悬浮单元190典型地包括一个或多个第一致动器191,以用于非接触地保持装置10。因此,装置的一个或多个第一磁对应件181可与磁悬浮单元190的一个或多个第一致动器191磁性地相互作用。
30.特别地,一个或多个第一磁对应件181可以是被动磁性元件。例如,一个或多个第一磁对应件181可由磁性材料(诸如铁磁材料、永磁体)制成,或者可具有永磁性质。
31.如本文所使用的“被动磁性元件”或“被动磁体”可被理解为未被主动地控制(例如,经由反馈控制)的磁体。例如,没有根据输入参数(诸如距离)来控制的输出参数(诸如被动磁体的磁场强度)。例如,如的“被动磁性元件”可包括一个或多个永磁体。替代地或另外地,“被动磁性元件”或“被动磁体”可包括可能未被主动地控制的一个或多个电磁体。
32.例如,如图2示例性所示,一个或多个第一致动器191可附接到例如真空腔室的上腔室壁177的外表面。替代地,一个或多个第一致动器191可附接到上腔室壁177的内表面,如图5中示例性所示。
33.在本公开内容中,“磁悬浮单元”可被理解为被配置为通过使用磁力以非接触方式保持对象(例如,诸如载体的装置)的单元。在本公开内容中,术语“悬浮(levitating)”或“悬浮(levitation)”是指对象(例如,承载基板或掩模的载体)的状态,其中对象在没有机械接触或支撑的情况下漂浮。
34.在本公开内容中,术语“非接触悬浮”可在如下意义上理解:重量(例如,载体的重量、特别是承载基板或掩模的载体的重量)不是由机械接触或机械力保持的,而是由磁力保持的。换句话说,说明书全文所使用的术语“非接触”可被理解为使用磁力而不是机械力(即接触力)来将载体保持在悬浮或漂浮状态下。
35.在本公开内容中,磁悬浮单元的“第一致动器”可被理解为主动且可控制的元件。特别地,一个或多个第一致动器可包括可控磁体,诸如电磁体。一个或多个第一致动器的磁场可以是可主动地控制的,以维持和/或调整磁悬浮单元与载体之间的距离。换句话说,磁
悬浮单元的“第一致动器”可被理解为具有可控制且可调整的磁场以提供作用在载体上的磁悬浮力的元件。
36.示例性参考图2,应当理解,驱动单元110的一个或多个电磁体130代表电磁线性马达的定子部分。另外,示例性参考图2,应当理解,一个或多个电磁体130被布置成与装置10的一个或多个第二磁对应件182相互作用。特别地,一个或多个第二磁对应件182可设置在装置10的底部处。在装置运输期间,一个或多个第二磁对应件182在运输方向t上移动,从而经过一个或多个电磁体130。因此,一个或多个电磁体130可被理解为电磁线性马达的定子,并且一个或多个第二磁对应件182可被理解为电磁线性马达的动子部件。例如,电磁线性马达可以是同步线性马达或异步线性马达。
37.因此,应当理解,装置的一个或多个第二磁对应件182可与驱动单元110的一个或多个电磁体130磁性地相互作用。特别地,一个或多个第二磁对应件182可以是被动磁性元件。例如,一个或多个第二磁对应件182可由磁性材料(诸如铁磁材料、永磁体)制成,或者可具有永磁性质。
38.换句话说,根据可与本文描述的任何其他实施方式结合的实施方式,一个或多个电磁体130被配置为(特别是以非接触方式)在运输方向上移动装置。特别地,应当理解,一个或多个电磁体130可以是可主动控制的,以用于在运输方向t上对装置10施加移动力。
39.因此,“驱动单元”可被理解为被配置为在运输方向上移动如本文所描述的装置的单元。特别地,如本文所描述的驱动单元可被配置为产生在运输方向t上作用在装置(例如,载体)上的磁力。因此,驱动单元可以是线性马达。更具体地,用于移动或运输装置的驱动单元可被理解为被配置为提供驱动力(例如在不同于悬浮力的方向上的力)的单元,其中装置从一个位置移动到另一个不同位置,例如沿运输方向的不同位置。例如,该装置可以是承载基板或掩模的载体,并且可通过磁悬浮单元(即,通过对抗重力的力)悬浮。装置可在被悬浮时由驱动单元在运输方向t(不同于与重力平行的方向)上移动。
40.示例性参考图3,根据可与本文描述的任何其他实施方式结合的实施方式,真空系统140包括一个或多个管道141,该一个或多个管道141将外壳120的内部空间121与一个或多个真空泵142连接。例如,一个或多个真空泵142可包括预真空泵、高真空泵和超高真空泵中的至少一者。
41.另外,如图3示意性所示,一个或多个电磁体130可包括分别缠绕在一个或多个芯132周围的一个或多个线圈131。一个或多个电磁体130(特别是一个或多个线圈131)典型地经由一个或多个电源线151连接。如图3示意性所示,一个或多个电源线151延伸穿过外壳120的壁。一个或多个芯132可包括磁性材料,即,铁磁材料,诸如铁等。一个或多个线圈131可被提供为缠绕在一个或多个芯周围的导线。
42.根据可与本文描述的任何其他实施方式结合的实施方式,外壳120包括主体122,主体122具有用于一个或多个电磁体130的接收部123,如图3中示例性指示的。更具体地,接收部123被配置为使得一个或多个电磁体130可布置在其中。另外,外壳120包括覆盖接收部123的盖124。因此,应当从图3中理解,外壳的内部空间121由具有接收部123的主体122和盖124限定。典型地,盖124包括膜片125,如图3示意性指示的。术语“膜片”可被理解为相对于膜片的厚度具有大表面积的结构。例如,典型地,膜片125的厚度t为0.1mm<t<2.5mm、特别是0.1mm<t<2.0mm、更特别是0.1mm<t<1.0mm。根据其他示例,膜片125的厚度t为0.3mm
<t<2.5mm、特别是0.3mm<t<2.0mm、更特别是0.3mm<t<1.0mm。膜片125可由不锈钢制成。
43.通过提供具有如本文所描述的膜片的盖124,可有利地减少涡流损失。因此,由如本文所描述的驱动单元110所产生的驱动力相对于现有技术增加。因此,有益地,可提高总体驱动效率。
44.根据可与本文描述的任何其他实施方式结合的实施方式,典型地,在主体122与盖124之间的界面处设置气密密封件161,如图3示例性指示的。例如,气密密封件161可由o形环提供。
45.如图3示例性所示,根据可与本文描述的任何其他实施方式结合的实施方式,运输系统100还可包括用于冷却驱动单元110的冷却系统170。特别地,冷却系统170典型地包括嵌入外壳120中的一个或多个冷却元件171。例如,一个或多个冷却元件171可以是基于流体的冷却元件,例如具有冷却流体的冷却管道。替代地,一个或多个冷却元件171可以是帕尔帖(peltier)元件。
46.根据可与本文描述的任何其他实施方式结合的实施方式,运输系统100包括真空腔室175,如图4示例性所示。驱动单元110至少部分地布置在真空腔室175内。
47.在本公开内容中,术语“真空”可被理解为具有小于例如10毫巴的真空压力的技术真空。典型地,如本文所描述的真空腔室中的压力可在10-3
毫巴与约10-11
毫巴之间,更典型地在10-8
毫巴与10-11
毫巴之间或甚至小于10-11
毫巴。
48.示例性参考图4,根据可与本文描述的任何其他实施方式结合的实施方式,真空系统140与真空腔室175的内部空间176连接。因此,典型地,真空系统140被配置为在真空腔室175中提供具有第一真空压力p1的第一真空。例如,第一真空压力p1可以是高真空(high vacuum,hv)压力或超高真空(ultra high vacuum,uhv)压力。典型地,高真空压力(hv)是小于10-3
毫巴的压力、特别是在10-3
毫巴至10-8
毫巴的范围内。超高真空(uhv)压力是10-8
毫巴至10-11
毫巴的范围内的压力。
49.另外,真空系统140被配置为在驱动单元110的外壳120中提供具有第二真空压力p2的第二真空。例如,第二真空压力p2可以是预真空压力。典型地,预真空压力是在100毫巴至10-3
毫巴的范围内的压力。
50.因此,真空系统140可被配置为提供在外壳120的内部空间121与真空腔室175的内部空间176之间的压力差δp,|δp|<0.4巴、特别是|δp|<0.2巴、更特别是|δp|<0.1巴。更具体地,真空系统140可被配置为提供在真空腔室175的内部空间176中提供的第一真空压力p1与在外壳120的内部空间121中提供的第二真空压力p2之间的压力差δp,|δp|=p
1-p2<400毫巴、特别是|δp|<200毫巴、更特别是|δp|<100毫巴。应当理解,δp表示绝对压力差。因此,由于在驱动单元110的外壳120的内部与真空腔室175的内部之间的减小的压力差,与现有技术相比,盖124、特别是膜片125可具有更低厚度,因为膜片上的应力并因此弹性变形可被有益地减少。
51.如图4示例性所示,根据可与本文描述的任何其他实施方式结合的实施方式,真空系统140包括预真空泵143和高真空泵144(特别是超高真空泵)。预真空泵143与高真空泵144(特别是超高真空泵)以及驱动单元110的外壳120的内部空间121例如经由一个或多个管道141连接。高真空泵144(特别是超高真空泵)连接到真空腔室175的内部空间176。因此,
有益地,可同时提供在真空腔室175内部的真空以及在驱动单元110的外壳120内部的真空。
52.示例性参考图4,根据可与本文描述的任何其他实施方式结合的实施方式,运输系统100包括设置在主体122与真空腔室175之间的界面处的另外的气密密封件162。
53.示例性参考图5,描述了根据本公开内容的(特别地用于竖直处理基板的)基板处理系统200。基板处理系统200包括至少一个真空处理腔室210、设置在真空处理腔室210中的处理装置220、以及用于运输基板载体230的运输系统100。处理装置220可从由沉积源、蒸发源和溅射源组成的组中选择,或从用于处理用于显示器制造的大面积基板的其他处理装置中选择。在图5中,处理装置220是沉积源,其中要沉积的材料由虚线箭头222指示。用于运输基板载体230的运输系统100包括驱动单元110,该驱动单元110包括外壳120,该外壳120包围具有一个或多个电磁体130的内部空间121。另外,用于运输基板载体230的运输系统100包括真空系统140,该真空系统140与外壳120的内部空间121和真空处理腔室210的内部空间211连接。特别地,用于运输基板载体230的运输系统100是按照根据本文描述的任何实施方式的用于移动装置100的运输系统100来配置的,如参照图1至图4示例性描述的。
54.示例性参考图6,描述了根据本公开内容的操作用于在真空处理系统中移动装置10的运输系统100的方法300。根据可与本文描述的任何其他实施方式结合的实施方式,方法300包括在真空处理系统的真空腔室175中施加(由图6中的框310表示)具有以第一真空压力p1的第一真空。
55.另外,方法300包括在驱动单元110的外壳120中施加(由图6中的框320表示)具有第二真空压力p2的第二真空。外壳120包围具有一个或多个电磁体130的内部空间121。另外,方法300包括通过采用驱动单元110来移动(由图6中的框330表示)装置10。
56.根据可与本文描述的任何其他实施方式结合的实施方式,方法300还包括提供(由图6中的框340表示)第一真空压力p1与第二真空压力p2之间的压力差δp,其中压力差δp是|δp|<0.4巴、特别是|δp|<0.2巴、更特别是|δp|<0.1巴。
57.鉴于以上内容,应当理解,与现有技术相比,本公开内容的实施方式有益地提供了在真空兼容性和驱动效率方面有所改善的运输系统、基板处理系统和操作运输系统的方法。
58.虽然前述内容针对实施方式,但是在不脱离基本范围的情况下,可设想其他和进一步实施方式,并且范围由所附权利要求书的范围确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1