一种自动化式端面切割装置的制作方法
1.本发明属于蜂窝陶瓷加工设备领域,具体涉及一种自动化式端面切割装置。
背景技术:
2.蜂窝陶瓷载体是一种结构似蜂窝形状的新型陶瓷产品,被广泛应用在化工、电力、冶金、石油、电子电器、机械等工业中。在蜂窝陶瓷载体的生产过程中,由于蜂窝陶瓷载体的高度存在一定量的公差,因此需要对蜂窝陶瓷载体的端面进行切割,使其高度满足规定尺寸。而目前常见的切割方法是通过单面切刀对其进行切除,这样的切割方式很容易造成蜂窝陶瓷载体两侧端面不平行,严重影响蜂窝陶瓷载体的产品质量。
技术实现要素:
3.本发明的目的是为了解决现有技术的不足,提供一种自动化式端面切割装置。
4.一种自动化式端面切割装置包括装置平台,所述的装置平台上设有进料工位、垂直度检测工位、端面切割工位、垂直度复检工位和出料工位,装置平台的中部设有横向放置的夹爪轨道,夹爪轨道上设有可沿夹爪轨道活动的夹爪工装,夹爪工装内设有检测角度调整机构,所述的进料工位、垂直度检测工位、端面切割工位和垂直度复检工位之间通过夹爪工装相连,所述进料工位和出料工位的上方分别设有进料绗架和出料绗架,进料绗架和出料绗架上分别设有进料机械手和出料机械手,所述的进料工位与蜂窝陶瓷输送线之间通过进料机械手相连,出料工位与垂直度复检工位之间通过出料机械手相连,所述的垂直度检测工位和垂直度复检工位上均设有检测机构,检测机构包括对称放置在夹爪轨道前后两侧的光源和视觉检测设备,所述的视觉检测设备用于检测光源是否通过蜂窝陶瓷载体,并反馈光源通过信号至控制器,控制器与夹爪工装控制相连。
5.更进一步地,装置平台靠近进料工位的一端设有托盘自动堆叠机,所述的托盘自动堆叠机位于装置平台和蜂窝陶瓷输送线之间。
6.更进一步地,装置平台上还开设有切割废料收集槽,所述的切割废料收集槽位于夹爪轨道的四周,并且切割废料收集槽与装置平台侧面上的切割废料出料槽相连通,所述的切割废料出料槽内设有切割废料输送带。
7.更进一步地,端面切割工位上设有两组前后对称的端面切割机构,所述的端面切割机构包括切割砂轮和转动电机,切割砂轮套设在转动电机的转轴上。
8.更进一步地,垂直度复检工位和出料工位之间设有风刀吹扫设备。
9.更进一步地,出料工位上设有用于放置蜂窝陶瓷载体的出料载台。
10.更进一步地,控制器上设有报警指示灯,所述的报警指示灯用于提示操作人员取下不合格的蜂窝陶瓷载体。
11.有益效果:本发明公开了一种自动化式端面切割装置,本端面切割装置将蜂窝陶瓷载体切割过程中的摆放方式由人工摆放改为机械夹爪摆放,保证了蜂窝陶瓷载体两侧端面相平行,并且通过增设垂直度检测工位和垂直度复检工位,保证了蜂窝陶瓷载体两侧端
面的垂直度,加快蜂窝陶瓷载体生产效率的同时提高了蜂窝陶瓷载体的产品质量。
附图说明
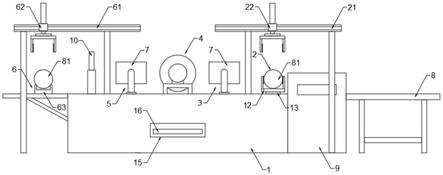
12.图1是端面切割装置的主视图;
13.图2是端面切割装置的俯视图;
14.图中:1、装置平台 11、夹爪轨道 12、夹爪工装 13、检测角度调整机构 14、切割废料收集槽 15、切割废料出料槽 16、切割废料输送带 2、进料工位 21、进料绗架 22、进料机械手 3、垂直度检测工位 4、端面切割工位 41、端面切割机构 42、切割砂轮 43、转动电机 5、垂直度复检工位 6、出料工位 61、出料绗架 62、出料机械手 63、出料载台 7、检测机构 71、光源 72、视觉检测设备 8、蜂窝陶瓷输送线 81、蜂窝陶瓷载体 9、托盘自动堆叠机 10、风刀吹扫设备
具体实施方式
15.为了加深对本发明的理解,下面结合实施例和附图对本发明作进一步详细详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
16.如图1和图2所示,一种自动化式端面切割装置包括装置平台1,所述的装置平台1上设有进料工位2、垂直度检测工位3、端面切割工位4、垂直度复检工位5和出料工位6,装置平台1的中部设有横向放置的夹爪轨道11,夹爪轨道11上设有可沿夹爪轨道11活动的夹爪工装12,夹爪工装12内设有检测角度调整机构13,所述的进料工位2、垂直度检测工位3、端面切割工位4和垂直度复检工位5之间通过夹爪工装12相连。
17.所述进料工位2和出料工位6的上方分别设有进料绗架21和出料绗架61,进料绗架21和出料绗架61上分别设有进料机械手22和出料机械手62,所述的进料工位2与蜂窝陶瓷输送线8之间通过进料机械手22相连,出料工位6与垂直度复检工位5之间通过出料机械手62相连。
18.所述的垂直度检测工位3和垂直度复检工位5上均设有检测机构7,检测机构7包括对称放置在夹爪轨道11前后两侧的光源71和视觉检测设备72,所述的视觉检测设备72用于检测光源71是否通过蜂窝陶瓷载体81,并反馈光源71通过信号至控制器,控制器与夹爪工装12控制相连。
19.于本实施例中,装置平台1靠近进料工位2的一端设有托盘自动堆叠机9,所述的托盘自动堆叠机9位于装置平台1和蜂窝陶瓷输送线8之间。
20.于本实施例中,装置平台1上还开设有切割废料收集槽14,所述的切割废料收集槽14位于夹爪轨道11的四周,并且切割废料收集槽14与装置平台1侧面上的切割废料出料槽15相连通,所述的切割废料出料槽15内设有切割废料输送带16。
21.于本实施例中,端面切割工位4上设有两组前后对称的端面切割机构41,所述的端面切割机构41包括切割砂轮42和转动电机43,切割砂轮42套设在转动电机43的转轴上。
22.于本实施例中,垂直度复检工位5和出料工位6之间设有风刀吹扫设备10。
23.于本实施例中,出料工位6上设有用于放置蜂窝陶瓷载体81的出料载台63。
24.于本实施例中,控制器上设有报警指示灯,所述的报警指示灯用于提示操作人员取下不合格的蜂窝陶瓷载体81。
25.工作情况:如图1和图2所示,蜂窝陶瓷载体81通过蜂窝陶瓷输送线8输送至装置平台1后被进料绗架21上的进料机械手22抓取,进料机械手22将蜂窝陶瓷载体81放置在进料工位2处,并被夹爪轨道11上的夹爪工装12所抓取,夹爪工装12带动蜂窝陶瓷载体81运动至垂直度检测工位3,夹爪工装12内的检测角度调整机构13调节蜂窝陶瓷载体81不同的检测角度,视觉检测设备72开始记录不同检测角度下的光源71是否通过蜂窝陶瓷载体81,并反馈光源71通过信号至控制器,在规定时间内,以光源71顺利通过蜂窝陶瓷载体81时的检测角度为最佳角度,控制器控制夹爪工装12以最佳角度为标准调节蜂窝陶瓷载体81的抓取角度,第一次垂直度检测完成后,夹爪工装12带动蜂窝陶瓷载体81转运至端面切割工位4,此时端面切割工位4内的两组端面切割机构41对蜂窝陶瓷载体81的两侧端面进行切割,切割工作完成后,蜂窝陶瓷载体81随着夹爪工装12来到垂直度复检工位5进行第二次垂直度检测,第二次垂直度检测后的蜂窝陶瓷载体81通过出料绗架61上的出料机械手62转运至出料工位6上的出料载台63内,并且在转运过程中蜂窝陶瓷载体81被风刀吹扫设备10所吹扫。
26.需要注意的是:如果在规定时间内,视觉检测设备72始终无法检测到光源71通过蜂窝陶瓷载体81,视觉检测设备72反馈检测不合格信号至控制器,控制器上的报警指示灯亮起,用于提示操作人员取下不合格的蜂窝陶瓷载体81。
27.本端面切割装置将蜂窝陶瓷载体切割过程中的摆放方式由人工摆放改为机械夹爪摆放,保证了蜂窝陶瓷载体两侧端面相平行,并且通过增设垂直度检测工位和垂直度复检工位,保证了蜂窝陶瓷载体两侧端面的垂直度,加快蜂窝陶瓷载体生产效率的同时提高了蜂窝陶瓷载体的产品质量。
28.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1