通信光纤用的高精度研磨装置及其使用方法与流程
1.本发明属于通信光纤加工技术领域,具体涉及通信光纤用的高精度研磨装置及其使用方法。
背景技术:
2.特殊几何形状端面的光纤对提高光耦合效率具有重要作用,这对于光在通讯在传感的发展中有着很重要的价值。光纤研磨抛光是一种比较常见的光纤端面加工方法。如将光纤夹持在夹具中,漏出端面,与转动的研磨片接触,实现研磨抛光。
3.在研磨过程中,研磨机构会出现颤动主要原因为两个方面,第一直接来源:研磨机构自身原因:研磨机构由研磨座和研磨片组成,研磨片会因磨耗而难以继续达到所需的研磨效果时,就需要更换新的研磨片,为了实现更换研磨片方便,研磨片与研磨座可拆卸设置,然而在研磨过程中,研磨座在旋转时,会影响研磨座上的研磨片,使得研磨片上各点很难保证在同一平面内,使得研磨座以及研磨片的转动轨迹超过工作范围内,给研磨深度带来一定的误差,影响研磨效果,降低研磨的精密度;第二间接来源:随着传动轴的使用,传动轴自身会发生损耗,传动轴自身转动时会发生不稳定转动,从而影响了与传动轴连接的研磨机构,使研磨机构转动会发生颤动。
技术实现要素:
4.发明目的:为了解决上述问题,本发明提供了通信光纤用的高精度研磨装置及其使用方法。
5.技术方案: 一种通信光纤用的高精度研磨装置,包括工作台,还包括:研磨机构,设于所述工作台上;驱动机构,设于所述工作台下方且与所述研磨机构传动连接;所述驱动机构用于驱动研磨机构在水平面上自转的同时,还用于调节研磨机构在水平面上的平衡性;视觉识别单元,设于所述研磨机构一侧;所述视觉识别单元被设定实时监测所述研磨机构转动时的转动轨迹,得到转动轨迹范围。
6.在进一步的实施例中,所述研磨机构包括:研磨座,开设在所述研磨座上且与研磨座同轴并用于容纳研磨片的凹槽,至少三组沿所述凹槽周向排布并向外伸展的限位槽,与所述限位槽传动连接的限位件;研磨时,所述限位件被设定与研磨片接触并对研磨机构施加压力,实现研磨片除在水平面上转动外无其他方向的活动自由度。
7.在进一步的实施例中,所述驱动机构包括:贯穿所述工作台延伸至与所述研磨机构连接的传动轴,与所述传动轴连接的驱动组件,以及设于所述传动轴下端部且用于平稳传动轴的平衡组件。
8.在进一步的实施例中,研磨时,通讯光纤的待研磨端被设定在预定位置被研磨,所
述预定位置的范围半径,其中r为研磨片的半径。
9.在进一步的实施例中,还包括微调机构:微调机构,设于所述研磨机构与工作台之间;使用前,所述微调机构与研磨机构不接触,使用时,所述微调机构向研磨机构方向伸长,直至与所述研磨机构接触且研磨机构研磨时转动轨迹在预定范围内。
10.使用上述一种通信光纤用的高精度研磨装置的使用方法,包括以下步骤:获取所述研磨机构研磨时转动n圈的转动轨迹,得到研磨时转动轨迹范围;将所述转动轨迹范围与预定范围比较;若所述转动轨迹范围在预定范围内,则保持原态;若所述转动轨迹范围不在预定范围内,则对所述研磨机构进行微调处理。
11.在进一步的实施例中,得到转动轨迹范围具体为:以垂直所述工作台顶面的平面建立x
‑
y坐标系,在所述上表面边缘选取若干个参考特定点,设定若干个参考特征点分别为a、b
…
q,所述若干个参考特定点每经过视觉识别单元且处于x
‑
y坐标系的平面上时,所述识别单元获取若干个参考特定点的图像,并计算得出研磨时若干个参考特定点的坐标。
12.在进一步的实施例中,预定范围的确定具体步骤为:所述研磨在静止时,所述识别单元获取若干个参考特定点a、b
…
q的图像信息,并计算得出若干个参考特定点a、b
…
q静止时的坐标,得到若干个参考特定点当前横坐标集合,在静止时若干个特定点的纵坐标相等,设为h,则预定范围为(h
‑
h,h+h),其中h为研磨机构转动时在误差范围内可接受的颤动高度。
13.在进一步的实施例中,研磨时,识别单元得到参考特征a、b
…
q的坐标为,得到若干个参考特定点更新的横坐标集合,其中n为研磨机构转动的圈数或参考特征点a、b
…
q第n次经过工业摄像机,则参考特征点a、b
…
q的研磨时的高度分别为,
…
,并得到参考特征点a、b
…
q的高度集合。
14.在进一步的实施例中,若p∈(h
‑
h,h+h)且s=s’,则所述微调机构保持原状;否则,所述微调机构向上运动,直至与所述研磨机构接触,直至p∈(h
‑
h,h+h)且s=s’。
15.有益效果:驱动机构在为研磨机构提供动力的同时,通过在传动轴端部设置平衡组件,对传动轴下端进行约束,减少传动轴不稳定转动,从而实现减少研磨机构的颤动震动;识别视觉单元实时监测研磨机构研磨时的转动轨迹范围,并获得转动轨迹范围结果,当研磨机构的转动轨迹范围不在预定范围内时,通过微调机构将对研磨机构进行微调,从而实现研磨机构的转动轨迹范围在预定范围内,实现了对研磨机构的减震,从而减少研磨深度变化带来的误差,保证研磨效果,提高研磨的精密度。
附图说明
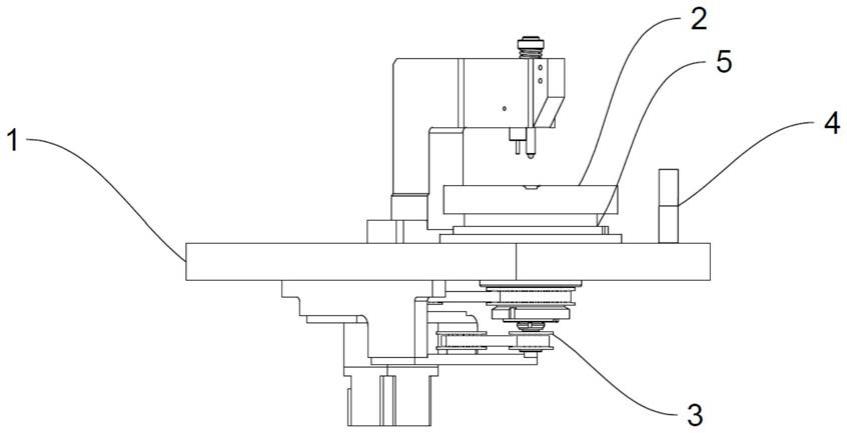
16.图1是本发明的结构示意图。
17.图2是驱动机构的部分结构示意图。
18.图3是研磨机构的结构示意图。
19.图4是微调机构的结构示意图。
20.图1至图4中各标注为:工作台1、研磨机构2、驱动机构3、视觉识别单元4、微调机构5、研磨座21、研磨片22、限位件23、传动轴31、伺服电机32、主动轮33、从动轮34、固定板35、第一转轮36、第二转轮37、安装座51、活动座52、电动伸缩杆53、弹性弹簧54。
具体实施方式
21.为了解决现有技术中存在的问题,申请人对现有各种方案进行了深入地分析,具体如下:现有技术中为了使得更换研磨片方便,一般采用研磨片与研磨座可拆卸设置,如研磨片上设置安装孔直接放置在研磨座上。但随着研磨机构的使用,研磨机构长久的工作,内部结构都会发生损耗,研磨座在随着电机旋转时,研磨座本身会发生颤动,进而影响到研磨座上的研磨片,研磨片会随着研磨座一起颤动或与研磨座发生位置偏移,研磨座以及研磨片的实际转动轨迹超过工作范围时,会给研磨深度带来一定的误差,从而影响研磨效果,降低研磨精度。
22.为此申请人在延长研磨装置的寿命情况下,对减少研磨座21以及研磨片22颤动做出改进,并提出了以下解决方案,提供了一种通信光纤用的高精度研磨装置,包括工作台1,研磨机构2,驱动机构3,视觉识别单元4以及微调机构5。其中,工作台1包括顶面与底面,研磨机构2设在工作台1的顶面,驱动机构3设置在工作台1的底面,并与研磨机构2连接。视觉识别单元4设于研磨机构2的一侧,至少包括工业摄像机和计算机处理设备,工业摄像机用于实时监测研磨机构2转动时的转动轨迹并获取图像,将图像传输至计算机处理设备中,计算机分析计算出研磨机构2转动轨迹范围,并与预定范围比较。预定范围依据研磨机构2上表面边缘在静止时在工作台1上的高度h为参考,设置阈值h(阈值h为研磨机构2转动时在误差范围内可接受的颤动高度),则预定范围为。微调机构5设在研磨机构2下方,当研磨机构2的转动轨迹不在预定范围内时,微调机构5对研磨机构2进行调节,使研磨机构2的转动轨迹保持在预定范围内。
23.研磨机构2的颤动具体意思为研磨机构2除了在水平面上的转动外还包括具有其他方向的活动自由度,该其他方向的活动自由度为本发明提到的研磨机构2的颤动,该其他方向的活动自由度可包括研磨机构2在横向或竖向的一个方向上的运动。
24.研磨机构2的颤动来源主要为两个方面,第一方面为直接来源,由于研磨机构2自身的结构,研磨机构2有研磨座21和研磨片22组成。研磨片22与通信光纤直接接触研磨,研磨片22在使用过程中,难免出现磨损的现象,此时需要对研磨片22进行更换,为了方便更换,现有技术一般采用研磨片22与研磨座21可拆卸的方式进行连接,如直接在研磨片22上开设安装孔套在研磨座21上,研磨座21在转动时发生颤动,会影响研磨片22的稳定性,研磨片22也会跟着研磨座21一起颤动或者位置发生偏移,会给研磨深度带来误差,从而影响研
磨效果,为此:在进一步的实施例中,研磨机构2包括:研磨座21,研磨片22以及限位件23,研磨座21为圆形,研磨座21上表面同轴开设有具有一定深度的凹槽,凹槽用于容纳研磨片22,凹槽的深度与研磨片22的厚度相适应,在凹槽中心设置一个限位杆,研磨片22设置与限位杆适配的限位孔,将研磨片22放置在凹槽内时,限位杆穿过限位孔,限位杆的高度与研磨片22的厚度相等,研磨座21上表面与研磨片22形成一个平整的平面。沿着凹槽的周向设置至少三组等分排布并向外伸展的限位槽,在本实施例中限位槽为三组,在限位槽内滑动连接安装限位件23,限位件23为限位板,在装卸研磨片22时,限位件23移动至研磨机构2边缘,与研磨片22不接触,当研磨片22安装后,限位件23滑向研磨片22,与限位件23接触,并对限位件23施加移动的压力,使得研磨片22在研磨时不会具有活动自由度,限位件23与研磨片22的接触端具有一定的弧度,该弧度与研磨片22的弧度相适配,实现限位件23对研磨片22挤压时,研磨片22不会有活动自由度。
25.研磨机构2颤动第二方面来源为间接来源:随着研磨装置的使用,驱动机构3带动研磨机构2转动时,驱动机构3转轴发生损耗,驱动机构3的转轴的稳定性欠佳,导致转轴带动研磨机构2转动时,引起研磨盘转动时发生颤动,为此,在进一步的实施例中,驱动机构3包括传动轴31,驱动组件以及平衡组件。驱动机构3用于驱动研磨机构2在水平面上自转的同时,还用于调节研磨机构2在水平面上的平衡性,即保持研磨机构2除在水平面上自转外无其他方向的活动自由度。其中传动轴31贯穿所述工作台1延伸至与研磨机构2连接,连接方式为现有技术中常见的转轴与转盘连接方式。传动轴31转动时带动研磨机构2转动。驱动组件与传动杆轴连接,驱动组件具体包括设于工作台1下方的伺服电机32,与伺服电机32连接主动轮33,通过皮带与主动轮33连接的从动轮34,从动轮34与传动轴31传动连接;平衡组件与传动轴31下端部连接,平衡组件具体包括设于工作台1下方的固定板35,设于所述固定板35上的第一转轮36,通过张紧皮带与第一转轮36连接的第二转轮37,第二转轮37与传动轴31下端部连接,传动轴31自身的转动带动平衡组件转动,平衡组件反过来通过第一转轮36和第二转轮37的转动,对传动轴31下端部进行约束,由于第一转轮36和第二转轮37与张紧皮带之间形成一个稳定的传动系统,则会影响到与之连接的传动轴31下端部,引导传动轴31下端部保持稳定,从而降低因传动轴31不稳定而造成的研磨盘发生颤动的可能性。
26.在上述实施例中,传动轴31的不稳定转动发生位置不仅来自于下端部,还来源于上端部,设传动轴31与研磨机构2连接的位置为传动轴31的上端部,传动轴31上端部不稳定转动会导致研磨机构2晃动,为此,在进一步的实施例中:微调机构5与传动轴31同轴设置,微调机构5设于工作台1顶面与研磨机构2之间,微调机构5具体结构为包括设于工作台1顶面的安装座51,与安装座51弹性连接的活动座52,安装座51、活动座52与传动轴31同轴设置,安装座51与活动座52之间设有多组弹性弹簧54,弹性弹簧54内设有电动伸缩杆53,安装座51与传动轴31传动连接,活动座52与传动轴31通过滑动连接,活动座52向上移动时,沿着传动轴31外壁滑动。使用前,微调机构5与研磨机构2不接触,微调机构5与传动轴31同轴转动,当传动轴31的上端不稳定发生抖动时,微调机构5由于体积比传动轴31大,传动轴31的震感传递至微调机构5上,分担了传动轴31上端的抖动力,从而实现对传动轴31上端起到减震的效果。当研磨机构2的转动轨迹范围不在预定
范围时,说明研磨机构2的震动或震动较大,将微调机构5中活动座52向上移动,直至研磨机构2与研磨机构2接触,分担研磨机构2的震动,实现对研磨机构2的减震效果,使研磨机构2的转动轨迹范围与预定范围相同。同时微调机构5由于是与传动轴31同轴转动的,在微调机构5接触研磨机构2时,不会影响研磨机构2自身的旋转。在微调机构5向上移动接触研磨机构2过程中,对研磨机构2的接触力远小于研磨机构2与传动轴31之间的作用力,所以微调机构5不会对研磨机构2与传动轴31之间的作用力造成影响,或者说微调机构5不会使研磨机构2在竖向方向上有活动自由度。
27.为了进一步防止由于研磨机构2的颤动对研磨不利影响,因为研磨机构2转动时,受离心力的影响,越靠近边缘的点越不稳定,震动发生可能性越大,为了降低研磨机构2自身带来的影响,研磨时,设定通讯光纤的待研磨端在研磨机构2的中心范围被研磨,中心范围为以研磨机构2的原点为中心,半径为r的圆,其中, ,r为研磨片的半径。
28.使用上述的一种通讯光纤用的高精度研磨装置的使用方法,包括以下步骤:获取研磨机构2研磨时转动n圈的转动轨迹,得到研磨时转动轨迹范围。通信光纤在研磨机构2的上表面进行研磨处理,研磨机构2上表面边缘的高度波动即表明了研磨机构2的研磨效果是符合要求。故在研磨机构2上表面边缘上设定若干个参考特定点a、b
…
q,以垂直工作台1顶面的平面建立x
‑
y坐标系,研磨机构2静止时,若干个参考特征点位于x
‑
y坐标系上,在本实施例中选取两个参考特征点a、b;左右工业摄像机设置在研磨机构2的一侧,在研磨机构2静止时,获取研磨机构2静止图像信息,得到参考特征点a、b在静止时的坐标分别为,得到a、b当前横坐标集合,研磨机构2在静止时,,h为研磨机构2上表面边缘相对于工作台1顶面的高度;研磨机构2每经过一次转动,参考特征点a、b都会经过工业摄像机,左右工业摄像机对经过其且处于x
‑
y坐标系上的参考特征点a、b进行图像获取,得到研磨时参考特征点a、b的坐标为,n为研磨机构转动的圈数或者说参考特征点a、b第n次经过工业摄像机。研磨时或者,分别得到参考特征点a、b的研磨时的高度分别为,,进而得到参考特征点a、b的高度集合;以及a、b两点更新的横坐标集合。
29.在x
‑
y坐标系上,任意一点o的坐标o,在左右工业摄像机成像内的成像坐标分别为,则,,其中l为左右摄像机的光心间的固定距离。
30.将转动轨迹范围与预定范围比较;设置阈值h(阈值h为研磨机构2转动时在误差范围内可接受的颤动高度),则预定范围为(h
‑
h,h+h)。将参考特征点a、b研磨时的高度的
、也即集合与预定范围(h
‑
h,h+h)比较,只有p∈(h
‑
h,h+h)且s=s’,则微调机构5保持原态;否则启动微调机构5,对研磨机构2进行微调处理直至获取的p和s’满足。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1