非晶带材热处理收放带系统及控制方法与流程
1.本发明涉及非晶、纳米晶带材处理,特别涉及非晶、纳米晶带材处理中的恒速、恒张力系统及控制方法,属于高端磁芯生产制造技术领域。
背景技术:
2.应用于电表等方面的磁芯要求低导磁率、低损耗、抗直流,性能稳定磁芯,通过对非晶、纳米晶带材进行退火处理(热处理)可以使材料达到这种要求,在中国专利申请号2006800267143、2014101224230中对这一处理过程进行过较为详细的披露,这一过程中退回过程中的温度、带材所受到的张力、带材的速度对得到的带材性能具有决定性的影响,上述两篇文献中均提到退火应在一定张力范围内进行,但生产实践证明,在退火时张力变化范围越大,得到的产品整体性能就越差、废品率也就越高,在恒张力、恒速情况下得到的带材性能最好,目前在这种非晶、纳米晶带材的处理中虽然上述方法已经公知,但最后能够得到符合要求纳米晶带、非晶带材的厂家还是少之又少,即使部分厂家得到了部分合格产品,但其良品率也较低,这种现象产生的主要原因就是在退回过程中无法实现恒速、恒张力,目前传统的张力控制采用的是在进退火炉的一侧压着带材,压着的部位至放带处的带材为松弛状态,靠压力实现带材的张力,这会产生摩擦影响带材性能,且张力的大小与压力、摩擦系数均相关,压力和摩擦系数在实际运行中会发生变化,所以无法实现稳定的恒张力,在速度控制方面,因为经过退火炉后的收带侧卷绕的直径会越来越大,为了实现恒定的线速度,必须不断的调整收带轮的角速度,而这要求有带材的厚度一致、运行时间等固定的参照体系,但张力不恒定的情况下会导致速度的参照体系不稳定,导致实现恒速度较难,进一步加大了得到合格产品的难度。
技术实现要素:
3.本发明的目的在于克服目前的纳米晶带材的处理中存在的难以实现恒张力、恒速度的问题,提供一种非晶带材热处理收放带系统及控制方法。
4.为实现本发明的目的,采用了下述的技术方案:非晶带材热处理收放带系统,包括的安装在机架上均通过电机驱动的放带盘、收带盘,放带盘、收带盘的驱动电机均连接至控制器控制,在放带盘与收带盘之间带材经过的路径上转动安装有多个滚轮,与放带盘配合设置有带材检测传感器,放带盘转动放出带材后、被放出的带材呈松弛状态,在机架上还转动安装有过渡盘,所述的过渡盘为槽轮状,沿过渡盘的周面开设有多个径向的气孔,多个气孔均连通过渡盘的内腔,在过渡盘的中心或者转轴上连接有旋转接头,旋转接头与过渡盘的内腔连通,如旋转接头连接在转轴上,转轴上具有与过渡盘内腔相连通的气路,旋转接头的固定部连接在真空发生装置上,过渡盘的内腔除了气孔、旋转接头外与外界之间封闭隔离,在靠近过渡盘处具有一个前滚轮、一个后滚轮,从放带盘过来的带材绕过前滚轮、再绕过过渡盘、再绕过后滚轮后向后输送,过渡盘后的带材处于张紧状态;所述的过渡盘通过转轴转动安装有机架上,转轴直接连接在电子阻尼器上或者转
轴通过传动机构与电子阻尼器之间相传动;所述的恒速、恒张力系统还安装有过渡盘转速检测装置;所述的电子阻尼器、转速检测装置均连接至控制器。
5.进一步的;放带盘的驱动电机为步进电机,收带盘的电机为伺服电机。
6.进一步的;所述的前滚轮、后滚轮位于同一高度上,在前滚轮前部的架上还安装有第一支撑滚轮,带材从放带盘上放下后在下方做一个u形转弯后从第一支撑轮上经过。
7.进一步的;所述的电子阻尼器为磁阻尼器,磁阻尼器的转动轴与过渡盘的转轴之间同轴固定连接。
8.进一步的;所述的过渡盘转速检测装置为霍尔传感器。
9.进一步的;所述的带材检测传感器为接触式带材检测盘。
10.进一步的;所述的滚轮还包括位于收带盘前的末端支撑轮,在末端支撑轮前安装有三个呈三角形分布的滚轮a、滚轮b、滚轮c,其中第一支撑轮、前滚轮、后滚轮、滚轮a、滚轮c、末端滚轮位于同一高度上,滚轮c位于滚轮a、滚轮b连线的中线上。
11.非晶带材热处理收放带系统控制方法,采用非晶带材热处理收放带系统,所述的控制方法如下:a:放带电机转动放出带材,通过带材检测传感器检测带材的位置,使放出后的带材呈松弛状态;b:将带材绕过包括第一支撑滚轮、前滚轮、过渡盘、后滚轮后通过热处理设备后绕至收带盘上,除上述滚轮外,在带材经过的路径上可选择的设置或不设置其它滚轮;c:通过真空发生装置对过渡盘的内腔抽气,使带材吸附在过渡盘上,吸附在过渡盘上的带材与过渡盘之间成为一体,向后拉带材时驱动过渡盘转动,过渡盘转动带动磁阻尼器转动;d:收带电机向后拉带材驱动过渡盘旋转,调节电子阻尼器的阻力大小至设定值后使过渡盘转轴转动的阻力值恒定,在过渡盘转动过程采用过渡盘转速检测装置检测过渡盘转动的角速度,根据转盘转动的角速度、带材在过渡盘上绕设的周长得到带材向后移动的线速度,当带材向后移动的线速度达到设定要求时,通过控制收带电机的转速来保持过渡盘转动的角速度恒定,具体控制方法如下:根据过渡盘的角速度得到带材向后输送的线速度,根据带材向后移动的线速度、时长得到向后输送的带材的总长度,根据带材总长度、厚度可得到收带轮上带材盘的直径,根据带材盘的直径、收带轮的角速度可得到收带轮处带材的线速度,通过控制器调节控制使收带轮端的线速度与过渡轮后的带材线速度一致。
12.本发明的积极有益技术效果在于:本发明在纳米晶带材热处理中能够高精确的实现张力恒定、带材移动线速度恒定,使带材变形均匀、受热一致,为得到良好的性能的产品提供了强大的技术支撑,经过在实践中试用效果良好。
附图说明
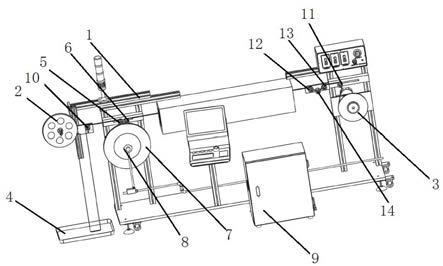
13.图1是本发明的一个方向的示意图。
14.图2是本发明的另一个方向的示意图。
15.图3是过渡盘内气路的示意图。
16.图4是过渡盘连接转轴机旋转接头的示意图。
具体实施方式
17.为了更充分的解释本发明的实施,提供本发明的实施实例,这些实施实例仅仅是对本发明的阐述,不限制本发明的范围。
18.附图中各标记为:1:机架;2:放带盘;3:收带盘;4:接触式带材检测盘;5:前滚轮;6:后滚轮;7:过渡盘;71:气孔;72:内腔;73:气道;74:旋转接头连接处;8:旋转接头;9:真空发生装置;10:第一支撑滚轮;11:末端支撑滚轮;12:滚轮a;13:滚轮b;14:滚轮c;15:步进电机;16:伺服电机;17:磁阻尼器;18:热处理炉;19:转轴。
19.纳米晶带材热处理中的恒速、恒张力系统,包括的安装在机架1上均通过电机驱动的放带盘2、收带盘3,放带盘、收带盘的驱动电机均连接至控制器控制,本实施例中,放带盘的驱动电机为步进电机15,收带盘的电机为伺服电机16。
20.在放带盘与收带盘之间带材经过的路径上转动安装有多个滚轮,与放带盘配合设置有带材检测传感器,所述的带材检测传感器为接触式带材检测盘,接触式带材检测传感器为现有技术,可参考中国专利号2017212321483中的方案。放带盘转动放出带材后、被放出的带材呈松弛状态,在机架上还转动安装有过渡盘7,所述的过渡盘为槽轮状,沿过渡盘的周面开设有多个径向的气孔71,多个气孔均连通过渡盘的内腔72,在过渡盘的中心或者转轴上连接有旋转接头8,旋转接头与过渡盘的内腔连通,74所示为旋转接头连接处,73所示为过渡盘内的气道,如旋转接头连接在转轴上,转轴上具有与过渡盘内腔相连通的气路,旋转接头的固定部连接在真空发生装置9上,过渡盘的内腔除了气孔、旋转接头外与外界之间封闭隔离,在靠近过渡盘处具有一个前滚轮5、一个后滚轮6,从放带盘过来的带材绕过前滚轮5、再绕过过渡盘7、再绕过后滚轮6后向后输送,过渡盘后的带材处于张紧状态;本实施例中,所述的前滚轮、后滚轮位于同一高度上,在前滚轮前部的架上还安装有第一支撑滚轮10,带材从放带盘上放下后在下方做一个u形转弯后从第一支撑轮上经过。
21.所述的过渡盘通过转轴19转动安装有机架上,转轴直接连接在电子阻尼器上或者转轴通过传动机构与电子阻尼器之间相传动;本实施例中,所述的电子阻尼器为磁阻尼器17,磁阻尼器的转动轴与过渡盘的转轴19之间同轴固定连接。所述的恒速、恒张力系统还安装有过渡盘转速检测装置;本实施例中,所述的过渡盘转速检测装置为霍尔传感器,所述的电子阻尼器、转速检测装置均连接至控制器。
22.更为优化的,所述的滚轮还包括位于收带盘前的末端支撑轮11,在末端支撑轮前安装有三个呈三角形分布的滚轮a12、滚轮b13、滚轮c14,其中第一支撑轮、前滚轮、后滚轮、滚轮a、滚轮c、末端滚轮位于同一高度上,滚轮c位于滚轮a、滚轮b连线的中线上。
23.纳米晶带材热处理中的恒速、恒张力控制方法,采用上述的恒速、恒张力系统,所述的控制方法如下:a:放带电机转动放出带材,通过带材检测传感器检测带材的位置,使放出后的带材呈松弛状态;b:将带材绕过包括第一支撑滚轮、前滚轮、过渡盘、后滚轮后通过热处理设备后绕至收带盘上,除上述滚轮外,在带材经过的路径上可选择的设置或不设置其它滚轮;c:通过真空发生装置对过渡盘的内腔抽气,使带材吸附在过渡盘上,吸附在过渡盘上的带材与过渡盘之间成为一体,向后拉带材时驱动过渡盘转动,过渡盘转动带动磁阻尼器转动;
d:收带电机向后拉带材驱动过渡盘旋转,调节电子阻尼器的阻力大小至设定值后使过渡盘转轴转动的阻力值恒定,在过渡盘转动过程采用过渡盘转速检测装置检测过渡盘转动的角速度,根据转盘转动的角速度、带材在过渡盘上绕设的周长得到带材向后移动的线速度,当带材向后移动的线速度达到设定要求时,通过控制收带电机的转速来保持过渡盘转动的角速度恒定,通过控制收带电机的转速具体控制方法如下:根据过渡盘的角速度得到带材向后输送的线速度,根据带材向后移动的线速度、时长得到向后输送的带材的总长度,根据带材总长度、厚度可得到收带轮上带材盘的直径,根据带材盘的直径、收带轮的角速度可得到收带轮处带材的线速度,通过控制器调节控制使收带轮端的线速度与过渡轮上的线速度一致。
24.在详细说明本发明的实施方式之后,熟悉该项技术的人士可清楚地了解,在不脱离上述申请专利范围与精神下可进行各种变化与修改,凡依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本发明技术方案的范围,且本发明亦不受限于说明书中所举实例的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1