一种爬壁机器人抛丸机的制作方法
1.本实用新型涉及抛丸机技术领域,特别是涉及一种爬壁机器人抛丸机。
背景技术:
2.抛丸机作为一种表面处理工具,在表面处理中经常用到,其普遍包括抛丸器,其由一个箱体内安装抛丸叶轮而形成,抛丸器的箱体上有进料口以及出料口,通过出料口由抛丸叶轮旋转将由进料口进入的钢丸旋转抛出,经由箱体引导后通过抛丸窗抛出冲击工件表面而对工件表面处理,而抛丸机在作业时,其抛丸窗须与工件的表面接触并密封。
3.有些工件,如船体,由于其需要表面处理的位置高,普通抛丸机不方便使用,就需要由爬壁机器人携带小型化的抛丸机移动到相应的位置,然后对工件外侧面进行抛丸作业,然而,目前的常规机器人抛丸机结构相对大,特别是设置有绞龙输送机来回料,实现丸料的循环输送,这样导致结构相对比较大,占用空间大且体积大,不利于爬壁机器人将其携带到相应的作业高度进行作业。
技术实现要素:
4.本实用新型的目的是针对现有技术中存在的技术缺陷,而提供一种用于爬壁机器人携带使用的结构紧凑,重量轻的小型化的抛丸机。
5.为实现本实用新型的目的所采用的技术方案是:
6.一种爬壁机器人抛丸机,包括抛丸器,与所述抛丸器传动连接的抛丸电机、与所述抛丸器连接的抛丸窗,所述抛丸器包括出料腔以及回料腔,所述出料腔以及回料腔呈v形连接且连接位置的前端开口与所述抛丸窗连接,所述回料腔连接到位于所述出料腔上方的回料箱的侧壁上的回料口,所述回料箱的底部的下料口通过下料锥连接到所述抛丸器的上端的入料口,所述抛丸器与工件接触的表面与水平面垂直布置。
7.优选的,所述下料锥与所述抛丸器的上端的入料口间形成下料通道中安装有电动砂阀以控制回料的下料。
8.优选的,所述抛丸电机布置在电机架上,位于所述抛丸器的后方,所述电机架与所述抛丸器的后端的连接板采用螺栓连接。
9.优选的,所述抛丸电机与所述抛丸器采用皮带传动连接。
10.优选的,所述回料箱中有上表面形成弧形状以引导回料呈弧形状流动回收的导流腔,所述导流腔的一端开口与回料口连接,另一端开口向下指向所述下料锥的上端。
11.优选的,所述导流腔的一侧设置有分隔板,该分隔板的上端与所述回料箱的上端连接,下端距离所述回料箱的底部一段距离而不接触,将所述回料箱的内部形成两个空间,所述导流腔位于其中一个空间内。
12.本实用新型的爬壁机器人抛丸机,不使用绞龙对回收料输送,成本低,结构简洁、紧凑,重量轻,固定在爬壁机器人上,方便爬壁机器人携带移动或升降作业,以对工件的表面进行处理作业。
附图说明
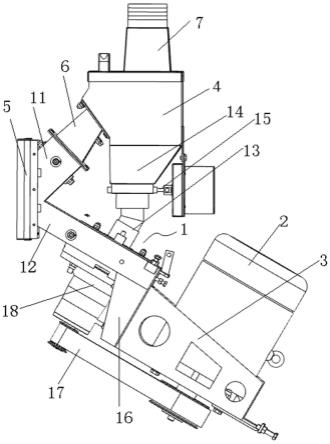
13.图1是本实用新型的爬壁机器人抛丸机整体构造示意图。
14.图2是本实用新型的立式抛丸机整体构造示意图(回料箱去掉一侧板)。
具体实施方式
15.以下结合附图和具体实施例对本实用新型作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
16.如图1-图2所示,本实用新型实施例的一种爬壁机器人抛丸机,包括抛丸器1,与所述抛丸器传动连接的抛丸电机2、与所述抛丸器连接的抛丸窗5,所述抛丸器包括出料腔12以及回料腔11,所述出料腔以及回料腔呈v形连接且连接位置的前端开口与所述抛丸窗5连接,所述回料腔通过回料管6连接到位于所述出料腔12上方的回料箱4的侧壁上的回料口,所述回料箱的底部的下料口通过下料锥14连接到所述抛丸器1的上端的入料口13,所述抛丸器与工件接触的表面与水平面垂直布置,如图1所示,工作时,抛丸机如图1所示状态,可以通过将该抛丸机固定于一个机架上,实现与移动设备或升降设置固定,以移动该抛丸机如图1所示直立状态下工作。
17.由于采用上述的技术方案,本实用新型中,设备整体结构紧凑,不使用回料绞龙,成本低,直接依靠重力进行回料循环利用。
18.作为一个可选的实施例,所述下料锥与所述抛丸器的上端的入料口间形成下料通道中安装有电动砂阀15以控制回料的下料。
19.作为一个可选的实施例,所述抛丸电机2布置在电机架3上,位于所述抛丸器1的后方,所述电机架3与所述抛丸器的后端的连接板16采用螺栓连接。其中,电机架3的侧面可以通过l形连接件与外侧的机架固定,以使电机架保护倾斜状,机架可以是一个方管焊接形成的矩形框架结构。
20.作为一个可选的实施例,所述抛丸电机与所述抛丸器采用皮带17传动连接,具体是与所述抛丸器1的抛丸叶轮组件18的驱动轴采用皮带连接。
21.作为一个可选的实施例,所述回料箱中有上表面形成弧形状以引导回料呈弧形状流动回收的导流腔19,所述导流腔的一端开口与回料口连接,另一端开口向下指向所述下料锥的上端。
22.作为一个可选的实施例,所述导流腔的一侧设置有分隔板20,该分隔板的上端与所述回料箱的上端连接,下端距离所述回料箱的底部一段距离而不接触,将所述回料箱的内部形成两个空间,所述导流腔位于其中一个空间内。
23.其中,所述的回料箱的顶端开口连接除尘管连接部7,以连接除尘管并连接到除尘设备,以除去处理过程中形成的粉尘,粉尘可以由分隔板的两侧向上而进入到除尘口排出。
24.本实用新型的爬壁机器人抛丸机,不使用绞龙对回收料输送,成本低,结构简洁、紧凑,重量轻,固定在爬壁机器人上,方便爬壁机器人携带移动或升降作业,以对工件的表面进行处理作业。
25.以上所述仅是本实用新型的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种爬壁机器人抛丸机,包括抛丸器,与所述抛丸器传动连接的抛丸电机、与所述抛丸器连接的抛丸窗,其特征在于,所述抛丸器包括出料腔以及回料腔,所述出料腔以及回料腔呈v形连接且连接位置的前端开口与所述抛丸窗连接,所述回料腔连接到位于所述出料腔上方的回料箱的侧壁上的回料口,所述回料箱的底部的下料口通过下料锥连接到所述抛丸器的上端的入料口,所述抛丸器与工件接触的表面与水平面垂直布置。2.根据权利要求1所述爬壁机器人抛丸机,其特征在于,所述下料锥与所述抛丸器的上端的入料口间形成下料通道中安装有电动砂阀以控制回料的下料。3.根据权利要求2所述爬壁机器人抛丸机,其特征在于,所述抛丸电机布置在电机架上,位于所述抛丸器的后方,所述电机架与所述抛丸器的后端的连接板采用螺栓连接。4.根据权利要求3所述爬壁机器人抛丸机,其特征在于,所述抛丸电机与所述抛丸器采用皮带传动连接。5.根据权利要求1所述爬壁机器人抛丸机,其特征在于,所述回料箱中有上表面形成弧形状以引导回料呈弧形状流动回收的导流腔,所述导流腔的一端开口与回料口连接,另一端开口向下指向所述下料锥的上端。6.根据权利要求5所述爬壁机器人抛丸机,其特征在于,所述导流腔的一侧设置有分隔板,该分隔板的上端与所述回料箱的上端连接,下端距离所述回料箱的底部一段距离而不接触,将所述回料箱的内部形成两个空间,所述导流腔位于其中一个空间内。
技术总结
本实用新型公开一种爬壁机器人抛丸机,包括抛丸器,与所述抛丸器传动连接的抛丸电机、与所述抛丸器连接的抛丸窗,所述抛丸器包括出料腔以及回料腔,所述出料腔以及回料腔呈V形连接且连接位置的前端开口与所述抛丸窗连接,所述回料腔连接到位于所述出料腔上方的回料箱的侧壁上的回料口,所述回料箱的底部的下料口通过下料锥连接到所述抛丸器的上端的入料口,所述抛丸器与工件接触的表面与水平面垂直布置。本实用新型的爬壁机器人抛丸机,不使用绞龙对回收料输送,成本低,结构简洁、紧凑,固定在爬壁机器人上,方便移动或升降作业。方便移动或升降作业。方便移动或升降作业。
技术研发人员:程学峰 郑林 程尧
受保护的技术使用者:天津圣弘业环保科技有限公司
技术研发日:2021.12.17
技术公布日:2022/6/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1