一种狭长方管内壁焊疤打磨机器人
1.本发明涉及焊疤打磨技术领域,尤其涉及一种狭长方管内壁焊疤打磨机器人。
背景技术:
2.机器人是可自主进行工作的机械装置,随着社会经济的发展和科学技术的进步,许多危险或重复作业的岗位都逐渐由机器人代替人工进行作业。在管道内壁打磨中,已经有很多种类的机器人被投入使用。但是在打磨长度远大于截面边长(长度是截面边长的10倍以上)的狭长方管内壁焊疤时,还没有很好的解决方案。如某企业有一批待打磨的狭长方管,方管长4m,截面为20cm*20cm的正方形,管道每个壁面上均有直径约2cm,厚1-2mm的焊疤,每条管道共有48个焊疤,共计32条管道,一共有1536个焊疤待打磨。如果使用人工打磨,预计需要数月完成。为此,亟待发明一种打磨机器人高效完成狭长方管的打磨任务,压缩时间成本。
3.现有的大部分管道打磨机器人适用于圆管内壁打磨,如专利cn113910077a公开了一种整体式管道打磨机器人,专利cn110185885b公开了一种管道打磨移动机器人,专利cn307181019s公开了金属管道打磨机器人,专利cn204658120u公开了管道焊缝打磨机器人。以上专利中方案都只适合于打磨圆管管道内的焊疤,无法适用于打磨狭长方管内壁的焊疤,且在提高打磨效率上缺乏专门的考虑。当采用焊接工艺制作的狭长方管如通风管道,储放狭长方形物品的管道内的焊疤需要打磨时,还是以人工打磨为主。人工打磨通常借助杆件将打磨头伸入管内作业,一方面当打磨位置距离进口较大时,打磨臂存在变形且视线受限导致操作难度大,另一方面受制于视线和杆件受力变形限制打磨力和打磨头推进速度慢导致打磨效率很低。
技术实现要素:
4.本发明目的在于针对现有技术的缺陷,提供一种高效的狭长方管内壁焊疤打磨机器人,其可承受的打磨速度和力相对较大。该机器人能简单实现机身横向移动与打磨头转向,具有运动灵活且刚度大的优势,从而可方便到达任意打磨位置并实现高效打磨,相对人工打磨显著提高了效率;特别是采用多个机器人同时作业时可同时打磨多个狭长方管,在保持高效的同时成本能优于采用多位工人打磨的成本。
5.为解决上述技术问题,本发明提供技术方案如下:
6.一种狭长方管内壁焊疤打磨机器人,其特征在于:包括底盘、机壳、转向模块、打磨模块,所述底盘上设置有驱动装置,所述机壳罩设在底盘上,所述转向模块包括转盘、转盘架、限位块、顶块,所述转盘架通过连接板与所述机壳外侧固定连接,所述转盘设置在转盘架的中部,转盘的中心通过连接杆转动连接在机壳上,所述限位块通过第一弹簧连接在转盘架的上下左右四边内侧,转盘的边缘开设有与所述限位块相配合的限位槽,所述顶块的一端通过第一传动轴连接驱动装置,另一端靠近转盘的边缘,且能够沿着转盘的径向挤压限位块,顶块通过第二弹簧连接转盘,所述打磨模块沿着转盘的径向与之固定连接,并且与
所述限位槽的位置相对应。
7.进一步的,所述转盘架的上下左右四个位置上各设置有一u型凹槽,所述限位块和第一弹簧设置在所述u型凹槽内。
8.进一步的,所述限位块为楔形结构。
9.进一步的,所述打磨模块包括打磨机体、打磨头、弹性伸缩杆、力矩电机,所述打磨机体固定连接在转盘上,所述打磨头通过所述弹性伸缩杆连接在打磨机体上,所述力矩电机固定连接在打磨机体上并且能够带动打磨头旋转。
10.进一步的,所述打磨机体上连接有摄像头,所述摄像头朝向所述打磨头的方向设置。
11.进一步的,还包括顶杆模块,所述顶杆模块包括第一电动顶杆、第二电动顶杆和第三电动顶杆,所述第一电动顶杆竖直设置在所述机壳内并向上延伸出机壳外,所述第二电动顶杆和第三电动顶杆水平设置在所述机壳内并分别左右延伸出机壳外。
12.进一步的,所述顶杆模块还包括齿轮、齿条,所述第二电动顶杆和第三电动顶杆分别水平连接在所述齿条的两端,所述齿轮的中心通过第二传动轴与所述驱动装置连接,所述齿轮和齿条相互啮合连接。
13.进一步的,所述第一电动顶杆的下端与所述机壳焊接固定。
14.进一步的,所述驱动装置与车轮相连,实现机器人的前后运动。
15.与现有技术相比,本发明的有益效果是:
16.1、本发明克服了现有的打磨机器人只能打磨圆形管道的不足,可用于管道较长、管口较小、焊疤较多需打磨的狭长方管的焊疤打磨。与人工借助长杆伸入狭长方形管道打磨相比,因就近操作和定位准确的优势本发明可显著提高打磨效率,大大缩短打磨时间。
17.2、本发明中通过使用电动推杆与齿轮齿条,实现机体横向上的移动,相对于转向机、转向杆组或者麦克纳姆轮结构简单、成本低廉;此外电动推杆可以在机器人打磨时稳定机身,有效防止因打磨产生的作用力使机器人机身抖动,保证了打磨时的准确度。通过一个简单的机构实现两个功能体现了机构的多功能化,同时也减小了机器人机身体积,工作时操作人员易于操作和控制。
18.3、本发明通过使用转向机构,实现打磨头360
°
的转向,可以打磨狭长方形管管道四侧的焊疤,进一步提高打磨效率。同时转向机构的自锁功能,可以确保打磨时打磨头不会晃动,结合电动推杆的稳定机身的功能,有效保证了打磨精度。
附图说明
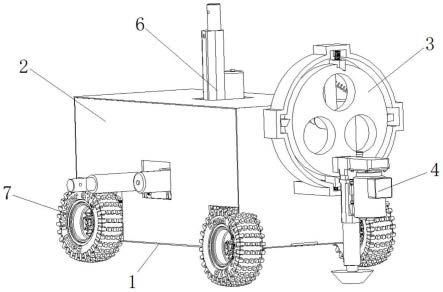
19.图1为本发明立体结构示意图一;
20.图2为本发明立体结构示意图二;
21.图3为本发明机壳内部结构示意图;
22.图4为本发明转向模块结构示意图;
23.图5为本发明限位块与限位槽配合状态示意图;
24.图6为本发明打磨模块结构示意图;
25.图7为本发明顶杆模块中第二电动顶杆和第三电动顶杆连接结构示意图;
26.图8为本发明实现上下左右四侧打磨时的工作状态示意图;
27.图9为本发明实现横向移动时的工作状态示意图;
28.其中:1-底盘,2-机壳,3-转向模块,4-打磨模块,5-驱动装置,6-顶杆模块,7-车轮,8-方管,9-焊疤,31-转盘,32-转盘架,33-限位块,34-顶块,35-连接板,36-连接杆,37-第一弹簧,38-第一传动轴,39-第二弹簧,41-打磨机体,42-打磨头,43-弹性伸缩杆,44-力矩电机,45-摄像头,61-第一电动顶杆,62-第二电动顶杆,63-第三电动顶杆,64-齿轮,65-齿条,66-第二传动轴,311-限位槽,321-u型凹槽。
具体实施方式
29.为了加深本发明的理解,下面我们将结合附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
30.图1、2示出了一种狭长方管内壁焊疤打磨机器人的具体实施例,包括底盘1、机壳2、转向模块3、打磨模块4、顶杆模块6,底盘1上设置有驱动装置5,机壳2罩设在底盘1上,底盘1与机壳2共同组成机器人的行进机构,底盘1上设有步进电机、差速器、传动系统,通过螺丝与底盘1相连,步进电机的运行带动传动系统,传递到车轮7,实现机器人在直线方向上的运动。
31.如图4所示,转向模块3包括转盘31、转盘架32、限位块33、顶块34,转盘架32通过连接板35与机壳2外侧固定连接,转盘31设置在转盘架32的中部,转盘31的中心通过连接杆36转动连接在机壳2上,转盘架32的上下左右四个位置上各设置有一u型凹槽321,限位块33通过第一弹簧37连接在转盘架32四周的四个u型凹槽321内,限位块33采用楔形结构,转盘31的边缘开设有与限位块33相配合的限位槽311,顶块34的一端通过第一传动轴38连接驱动装置5,另一端靠近转盘31的边缘,且能够沿着转盘31的径向挤压限位块33,顶块34通过第二弹簧39连接转盘31,打磨模块4沿着转盘31的径向与之固定连接,并且与限位槽311的位置相对应。
32.如图6所示,打磨模块4包括打磨机体41、打磨头42、弹性伸缩杆43、力矩电机44,打磨机体41固定连接在转盘31上,打磨头42通过弹性伸缩杆43连接在打磨机体41上,力矩电机44固定连接在打磨机体41上并且能够带动打磨头42旋转。打磨机体41上连接有摄像头45,摄像头45朝向打磨头42的方向设置,可将打磨状态图像信息实时反馈给操作人员,对机器人的位置、打磨速度进行适时调整。
33.如图3、7所示,顶杆模块6包括第一电动顶杆61、第二电动顶杆62、第三电动顶杆63、齿轮64、齿条65,第一电动顶杆61竖直设置在机壳2内,下端与机壳2焊接固定并向上延伸出机壳2外,第二电动顶杆62和第三电动顶杆63水平设置在机壳2内并分别左右延伸出机壳2外。第二电动顶杆62和第三电动顶杆63分别水平连接在齿条65的两端,齿轮64的中心通过第二传动轴66与驱动装置5连接,齿轮64和齿条65相互啮合连接。
34.如图8所示,打磨机器人工作时,第一传动轴38带动转盘31上的顶块34转动,顶块34与处于限位槽311中的限位块33接触后,第一弹簧37受到作用力被挤压,限位块33与限位槽311脱离,顶块34通过第二弹簧39拉动转盘31转动,当转盘31转动使限位槽311与下一限位块33配合时,转盘31停止转动,限位块33与限位槽311的状态如图5所示。工作时,打磨机器人先打磨方管8内壁下侧的焊疤9,如图8a。此时,力矩电机44提供动力,通过打磨机体41带动打磨头42高速旋转,弹性伸缩杆43给打磨头42提供垂直打磨面向下的作用力,确保打
磨头42与焊疤9平面紧密接触。打磨完毕后,启动转向模块3,此时转向模块3中转盘31逆时针转动,带动打磨模块4转动,打磨头42随着打磨机体41转动,依次完成狭长方管8内壁的右侧、上侧、左侧的焊疤9打磨,如图8b、c、d所示。
35.如图9所示,左右两侧的第二电动顶杆62和第三电动顶杆63分别顶住狭长方管8两侧内壁时,齿条65的位置相对固定下来,此时通过驱动装置5带动齿轮64沿着齿条65左右移动,从而带动整个机器人的主体在水平方向上左右平移,即横向上的平移,使打磨模块4能够对准需打磨区域。
36.上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1