一种煤岩粉煤光片的磨抛一体机及磨抛工艺的制作方法
1.本发明属于煤岩技术领域,涉及煤岩光片制备,具体涉及一种煤岩粉煤光片的磨抛一体机及磨抛工艺。
背景技术:
2.煤岩学是一个历史悠久而有充满活力的学科方向,煤岩分析广泛应用于煤炭资源勘查、煤炭分类、煤加工利用以及油气勘查、焦化厂监控进场煤质量、热液金属矿产预测等领域,是一项意义重大的基础性工作。制备出合格的粉煤光片是进行显微煤岩分析的基础。
3.长期以来,煤岩粉煤光片的制备一直沿用手工磨抛的方式,手工磨抛对操作人员的经验、体力等均具有较高的要求,磨抛效率较低,工作量大,粉煤光片质量无法保证,常因粉煤光片质量不达标对后续煤岩分析结果产生不利影响,人工磨抛粉煤光片在一定程度上影响了煤岩学方法的推广和应用。开发粉煤光片自动磨抛设备,是实现粉煤光片快速、高质量制备的一条重要技术途径,是未来煤岩光片制备的发展趋势,可以降低操作者的劳动强度,亦可以提高粉煤光片的质量。
4.当前煤岩粉煤光片磨抛领域主要存在下述三个问题:(a)无法实现煤岩粉煤光片的全自动磨抛;(b)磨抛工艺多样,不统一,且步骤复杂;(c)磨抛参数无法定量化固定。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于,提供一种煤岩粉煤光片的磨抛一体机及磨抛工艺,解决现有技术中的设备及工艺步骤复杂的技术问题。
6.为了解决上述技术问题,本发明采用如下技术方案予以实现:
7.一种煤岩粉煤光片的磨抛一体机,包括设备台体,设备台体的顶面上安装有机械臂、研磨工位和抛光工位;所述的研磨工位上安装有喷水龙头,所述的抛光工位上安装有喷抛光液水龙头。
8.所述的机械臂包括步进电机,步进电机带动中控旋转平台旋转,中控旋转台通过滚珠丝杠组件与小臂旋转伺服电机相连,小臂旋转伺服电机驱动曲柄滑块机构控制三爪气缸对样品放置套筒内的样品进行抓取和磨抛。
9.所述的设备台体的侧壁上设置有进气口、设备供电端子、进水口、进抛光液口、进洗洁精口和排水口;所述的进气口的外端与空气压缩机相连,所述的进气口的内外端分别与机械臂和抛光工位相连;所述的设备供电端子为磨抛一体机供电;所述的进水口的外端、进抛光液口的外端、进洗洁精口的外端和排水口的外端分别通过软管与外挂水箱相连,所述的外挂水箱悬挂在所述的设备台体的侧壁上;所述的进水口的内端分别与喷水龙头和喷抛光液水龙头相连;所述的进抛光液口的内端与喷抛光液水龙头相连;所述的进洗洁精口的内端与喷抛光液水龙头相连;所述的排水口的内端分别与研磨工位和抛光工位相连。
10.本发明还具有如下技术特征:
11.所述的设备台体的顶面上还安装有超声清洗工位和样品预置工位。
12.所述的设备台体的正面还设置有带有按键的触摸屏,触摸屏与电控系统相连。
13.所述的触摸屏用于实现人机交互,触摸屏还能够观察设备运行流程当前已经运行的状态。
14.所述的电控系统用于实现对磨抛一体机的各项参数进行设置和自动控制;所述的磨抛一体机的各项参数包括三爪气缸的三个套筒的磨抛气压、磨抛速度、磨抛抓手速度和磨抛圈数。
15.所述的电控系统分为运动控制部分和开关采集两大部分;所述的运动控制部分用于机械臂、研磨工位和抛光工位的运动件采集和控制功;所述的开关采集部分包括逻辑控制器信息处理模块、信息采集模块和动作命令发送模块,以及各气路水路的接线和供配电部分。
16.所述的设备台体的另一个侧壁上还设置有急停按钮,急停按钮与电控系统相连。
17.本发明还保护一种煤岩粉煤光片的磨抛工艺,该工艺采用如上所述的煤岩粉煤光片的磨抛一体机。
18.该工艺包括以下步骤:
19.步骤一,将样品按照gb/t 16773-2008的方法制备出煤岩粉煤光片;使用热胶法或冷胶法制备样品,研磨材料直接粘贴于研磨工位上;抛光材料直接粘贴于抛光工位上。
20.步骤二,启动煤岩粉煤光片的磨抛一体机,打开空压机,压缩气体通过进气口为磨抛一体机提供压缩气体。
21.步骤三,样品按顺序放置于样品预置工位中,与样品放置套筒的顺序相对应。
22.步骤四,对机械臂的位置进行校准。
23.步骤五,控制步进电机转动,带动中控旋转平台使机械臂运动于样品预置工位上方,机械臂通过滚珠丝杠组件沿z轴下降至样品相应位置,控制气压电磁阀启动,通过三爪气缸自动抓取样品,机械臂沿z轴抬起置初始高度。
24.步骤六,控制步进电机转动,带动中控旋转平台使机械臂运动于研磨工位上,机械臂通过滚珠丝杠组件沿z轴下降距离研磨工位至5mm处松开三爪气缸的抓手,控制气压电磁阀启动气压控制,根据设置的研磨气压参数重新进行样品抓取。
25.步骤七,控制喷淋电磁阀经喷水龙头进行喷水3秒,控制研磨工位电磁阀启动研磨工位,通过小臂旋转伺服电机控制曲柄滑块机构,使三爪气缸沿研磨工位逆时针反向旋转,控制喷淋电磁阀每隔10~15秒通过喷水龙头进行自动喷水2秒。
26.步骤八,当达到设定研磨圈数,控制研磨工位电磁阀停止工作,控制机械臂沿z轴同时抬起并通过小臂旋转一圈至初始位置。
27.步骤九,控制步进电机转动,带动中控旋转平台使机械臂运动于抛光工位上方,机械臂通过滚珠丝杠组件沿z轴下降距离抛光工位至5mm处松开气爪,控制气压电磁阀启动气压控制,根据设置的抛光气压参数重新进行样品抓取。
28.步骤十,控制喷淋电磁阀经喷抛光液水龙头进行喷抛光液3秒,控制抛光工位电磁阀启动抛光工位,通过小臂旋转伺服电机控制曲柄滑块机构,使三抓气缸沿抛光工位依逆时针旋转,控制喷淋电磁阀每隔10~15秒通过喷抛光液水龙头进行自动喷抛光液2秒。
29.步骤十一,当达到设定抛光圈数,控制抛光工位电磁阀停止工作,控制机械臂沿z轴同时抬起并通过小臂旋转一圈至初始位置。
30.步骤十二,控制步进电机转动,带动中控旋转平台使机械臂运动至超声清洗位,机械臂通过滚珠丝杠组件沿z轴下降至距超声清洗位底部10mm处松开气爪,超声清洗5~15秒,机械臂沿z轴抬起并通过中控旋转平台旋转至样品预置工位上方,沿z轴下降放置样品至初始位置,即完成自动磨抛。
31.步骤一中,所述的样品高度为9~13mm;所述的研磨材料选择粒径为600~2000目的背胶砂纸;所述的抛光材料选用羊绒或尼龙带背胶的抛光布。
32.步骤二中,设置研磨和抛光气压为0.040~0.150mpa,研磨速度为600~1500r/min,抛光速度为1200~2000r/min,研磨、抛光抓手速度为1~10r/min,研磨、抛光圈数为1~10圈。
33.步骤三中,能够同时进行3组9个样品的自动磨抛。
34.通过三爪气缸抓取样品时,执行平整度调整工序,所述的平整度调整工序采用先抓紧,再松开,最后二次抓紧的抓取方法,具体包括以下步骤:
35.步骤1,三爪气缸先抓紧光片样品,控制步进电机转动,带动中控旋转平台使机械臂运动于研磨工位或抛光工位上,此时光片样品和研磨工位或抛光工位之间的平整度未调整,进气口未提供高压气体。
36.步骤2,三爪气缸再松开光片样品,使光片样品自由置于研磨工位或抛光工位上,同时驱动进气口张开,为光片样品提供高压气体,使光片样品在高压气体和重力的双重作用下,达到与研磨工位或抛光工位实现平整。
37.步骤3,三爪气缸最后二次抓紧光片样品,执行后续磨抛工序。
38.本发明与现有技术相比,具有如下技术效果:
39.(ⅰ)本发明的一体机能够在无人工干预条件下进行煤岩粉煤光片的自动抓取、移动、研磨、抛光、清洗、放回原位等,实现煤岩粉煤光片的全自动磨抛。
40.(ⅱ)本发明的一体机煤岩粉煤光片自动磨抛设备创造性的采用一磨一抛工艺流程代替了传统磨抛工艺,达到《煤岩分析样品制备方法》(gbt16773-2008)要求的磨抛效果,磨抛步骤大幅简化。
41.(ⅲ)本发明的一体机解决了磨抛圈数磨抛压力等磨抛参数无法定量化的问题。实现了磨抛参数的定量化。
42.(ⅳ)本发明的工艺通过模拟人工磨抛的方法可以精确控制褐煤、烟煤、无烟煤及焦炭等煤岩光片磨抛参数,采用“一磨一抛”工艺,实现了煤岩光片的全自动磨抛。
43.(
ⅴ
)本发明的工艺应用降低了操作难度,工作人员易上手,可减少对专业性及经验的依赖,降低劳动强度和人员需求量,降低企业的用工成本。
附图说明
44.图1为煤岩粉煤光片的磨抛一体机的主视结构示意图。
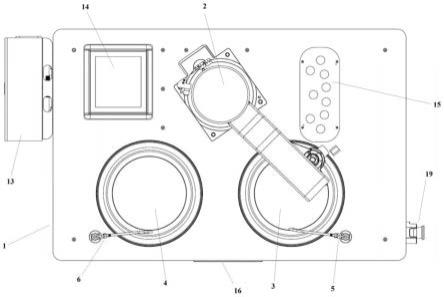
45.图2为煤岩粉煤光片的磨抛一体机的俯视结构示意图。
46.图3为机械臂的主视结构示意图。
47.图4为机械臂的侧视结构示意图。
48.图5为设备台体的侧视结构示意图。
49.图6为本发明的压缩空气气路示意图。
50.图7为本发明的水路控制示意图。
51.图8为电控系统的控制构架示意图。
52.图9为执行平整度调整工序的流程示意图。
53.图10(a)为未执行平整度调整工序的宏观磨抛效果图。
54.图10(b)为执行平整度调整工序后的宏观磨抛效果图。
55.图11(a)为未执行平整度调整工序的微观磨抛效果图。
56.图11(b)为执行平整度调整工序后的微观磨抛效果图。
57.图中各个标号的含义为:1-设备台体,2-机械臂,3-研磨工位,4-抛光工位,5-喷水龙头,6-喷抛光液水龙头,7-进气口,8-设备供电端子,9-进水口,10-进抛光液口,11-进洗洁精口,12-排水口,13-外挂水箱,14-超声清洗工位,15-样品预置工位,16-触摸屏,17-按键,18-电控系统,19-急停按钮,20-挂钩。
58.201-步进电机,202-中控旋转平台,203-滚珠丝杠组件,204-小臂旋转伺服电机,205-曲柄滑块机构,206-三爪气缸,207-样品放置套筒。
59.以下结合实施例对本发明的具体内容作进一步详细解释说明。
具体实施方式
60.需要说明的是,本发明中的所有零部件、机构、设备和装置,如无特殊说明,全部均采用现有技术中已知的零部件、机构、设备和装置。
61.现有技术中没有自动粉煤光片磨抛机,仅有半自动磨抛机,磨抛过程需要人为干预,磨抛效果差异较大,未有效解决无人工干预条件下进行煤岩粉煤光片的自动抓取、移动、研磨、抛光、清洗、放回原位的技术问题。本发明设备解决了上述问题。
62.现有磨抛工艺多样,多采用国标《煤岩分析样品制备方法》(gbt16773-2008)中推荐的粉煤光片四流程制备方法,即粗磨、精磨、细抛光、精抛光的研磨工艺,而本发明的煤岩粉煤光片自动磨抛设备创造性的采用一磨一抛工艺流程代替了传统磨抛工艺,经大量实验,所述设备采用一磨一抛工艺流程可以完好的代替传统磨抛工艺,达到《煤岩分析样品制备方法》(gbt16773-2008)要求的磨抛效果。
63.现有磨抛多凭借磨抛者的经验决定磨抛圈数、磨抛压力等磨抛参数,磨抛参数无法定量化,本发明通过大量实验解决了磨抛参数无法定量化的问题。
64.以下给出本发明的具体实施例,需要说明的是本发明并不局限于以下具体实施例,凡在本技术技术方案基础上做的等同变换均落入本发明的保护范围。
65.实施例1:
66.本实施例给出一种煤岩粉煤光片的磨抛一体机,如图1和图2所示,包括设备台体1,设备台体1的顶面上安装有机械臂2、研磨工位3和抛光工位4;所述的研磨工位3上安装有喷水龙头5,所述的抛光工位4上安装有喷抛光液水龙头6。
67.如图3和图4所示,所述的机械臂2包括步进电机201,步进电机201带动中控旋转平台202旋转,中控旋转台202通过滚珠丝杠组件203与小臂旋转伺服电机204相连,小臂旋转伺服电机204驱动曲柄滑块机构205控制三爪气缸206对样品放置套筒207内的样品进行抓取和磨抛。
68.如图5所示,所述的设备台体1的侧壁上设置有进气口7、设备供电端子8、进水口9、
进抛光液口10、进洗洁精口11和排水口12。
69.如图6所示,所述的进气口7的外端与空气压缩机相连,所述的进气口7的内外端分别与机械臂2和抛光工位4相连;所述的设备供电端子8为磨抛一体机供电。
70.如图7所示,所述的进水口9的外端、进抛光液口10的外端、进洗洁精口11的外端和排水口12的外端分别通过软管与外挂水箱13相连,所述的外挂水箱13悬挂在所述的设备台体1的侧壁上;所述的进水口9的内端分别与喷水龙头5和喷抛光液水龙头6相连;所述的进抛光液口10的内端与喷抛光液水龙头6相连;所述的进洗洁精口11的内端与喷抛光液水龙头6相连;所述的排水口12的内端分别与研磨工位3和抛光工位4相连。
71.本实施例中,设备台体1由底部支撑框架及壳体结构作为整个设备平台的支撑部分,包含内部焊接框架、外壳体、脚垫以及框架上的安装平面。
72.本实施例中,所述的外挂水箱13悬挂在所述的设备台体1的侧壁上的挂钩20上。
73.本实施例中,中控旋转台202包含外圈带齿形交叉滚子轴承、固定座,用于控制水平手臂上下移动。
74.本实施例中,曲柄滑块机构205用于进行整体水平面旋转、末端机械手回转两个动作配合,实现末端位置精确定位。优选的,曲柄滑块机构205采用已知常用的曲柄滑块机构。
75.本实施例中,三爪气缸206通过柔性并联末端执行器对气体介质作用的三个气缸进行的主动柔性控制。
76.本实施例中,样品放置套筒207内含有平台万向螺栓与弹簧配合的浮动机构,与三爪气缸206配合进行样品的抓取和模拟人手的柔性磨抛。
77.作为本实施例的一种优选方案,所述的设备台体1的顶面上还安装有超声清洗工位14和样品预置工位15。
78.作为本实施例的一种优选方案,所述的设备台体1的正面还设置有带有按键17的触摸屏16,触摸屏16与电控系统18相连。
79.作为本实施例的一种优选方案,所述的触摸屏16用于实现人机交互,触摸屏16还能够观察设备运行流程当前已经运行的状态。
80.作为本实施例的一种优选方案,如图8所示,所述的电控系统18用于实现对磨抛一体机的各项参数进行设置和自动控制;所述的磨抛一体机的各项参数包括三爪气缸的三个套筒的磨抛气压、磨抛速度、磨抛抓手速度和磨抛圈数。
81.进一步优选的,如图8所示,所述的电控系统18分为运动控制部分和开关采集两大部分;所述的运动控制部分用于机械臂2、研磨工位3和抛光工位4的运动件采集和控制功;所述的开关采集部分包括逻辑控制器信息处理模块、信息采集模块和动作命令发送模块,以及各气路水路的接线和供配电部分。
82.作为本实施例的一种优选方案,所述的设备台体1的另一个侧壁上还设置有急停按钮19,急停按钮19与电控系统18相连。
83.本实施例中,运动控制部分的各运动电机和开关采集部分的逻辑控制通过以太网进行通讯控制,实现信息的传输。急停按钮可实现一键急停保护各运动机构,触摸屏可实现工艺的选择。
84.本实施例中,末端机械手、机械臂、研磨三工位、抛光工位、机械臂z轴升降,均通过驱动器驱动电机实现。电机运行当前位置的采集均通过驱动器将信息转化输送给plc,即可
编程逻辑控制器,plc将电信号通过通讯协议发送给电机驱动器,电机驱动器将信息处理输出给电机运行指定的目标位和目标速度等。
85.本实施例中,逻辑控制器和采集模块采用成熟的plc系统完成。采集模块中包含数字量i/o模块和模拟量i/o模块,数字量主要包含启动信号、气压检测、电磁阀等信号。模拟量主要用于三爪气缸在抓取样品后研磨、抛光过程中,调节三爪气缸的三个套筒的气压为一个恒定值。为保证控制精度,通过增加前馈及摩擦补偿的方式提高控制精度。
86.本实施例中,设备中使用压缩气体作为动力的组件有:三爪气缸、套筒推压装置、抛光液搅拌。其中三爪气缸和抛光液的气体压力调试完成后恒定不变,套筒推压装置的压力是根据不同工艺修改设置参数的。因此在选择气动原件时除了常用的气体三联件、电磁阀、气压检测开关通过一套比例阀来实现不同工艺调节不同压力的功能。
87.实施例2:
88.本实施例给出一种煤岩粉煤光片的磨抛工艺,该工艺采用如上实施例1中给出的煤岩粉煤光片的磨抛一体机。
89.该工艺包括以下步骤:
90.步骤一,将样品按照gb/t 16773-2008的方法制备出煤岩粉煤光片;使用热胶法或冷胶法制备样品,样品高度为9~13mm;研磨材料选择粒径为600~2000目的背胶砂纸,直接粘贴于研磨工位3上;抛光材料选用羊绒或尼龙带背胶的抛光布,直接粘贴于抛光工位4上。
91.步骤二,启动煤岩粉煤光片的磨抛一体机,打开空压机,压缩气体通过进气口7为磨抛一体机提供压缩气体,根据样品的煤种情况,在触摸屏16中选择相应的自动磨抛模式;或在触摸屏16中选择自由磨抛模式,设置研磨和抛光气压为0.040~0.150mpa,研磨速度为600~1500r/min,抛光速度为1200~2000r/min,研磨、抛光抓手速度为1~10r/min,研磨、抛光圈数为1~10圈。
92.步骤三,样品按顺序放置于样品预置工位15中,与样品放置套筒207的顺序相对应,可同时进行3组9个样品的自动磨抛,在触摸屏16中选择需要磨抛的样品组。
93.步骤四,选择触摸屏16中设备自校功能,对机械臂2的位置进行校准。
94.步骤五,选择触摸屏16中自动磨抛功能,电控系统18控制步进电机201转动,带动中控旋转平台202使机械臂2运动于样品预置工位15上方,机械臂2通过滚珠丝杠组件203沿z轴下降至样品相应位置,控制气压电磁阀启动,通过三爪气缸206自动抓取样品,机械臂2沿z轴抬起置初始高度。
95.步骤六,电控系统18控制步进电机201转动,带动中控旋转平台202使机械臂2运动于研磨工位3上,机械臂2通过滚珠丝杠组件203沿z轴下降距离研磨工位3至5mm处松开三爪气缸206的抓手,电控系统18控制气压电磁阀启动气压控制,根据设置的研磨气压参数重新进行样品抓取。
96.步骤七,电控系统18控制喷淋电磁阀经喷水龙头5进行喷水3秒,控制研磨工位电磁阀启动研磨工位3,通过小臂旋转伺服电机204控制曲柄滑块机构205,使三爪气缸206沿研磨工位3逆时针反向旋转,电控系统18控制喷淋电磁阀每隔10~15秒通过喷水龙头5进行自动喷水2秒。
97.步骤八,触摸屏16上记录并显示设置的总研磨圈数和已经完成的研磨圈数,当达到设定研磨圈数,电控系统18控制研磨工位电磁阀停止工作,控制机械臂2沿z轴同时抬起
并通过小臂旋转一圈至初始位置。
98.步骤九,电控系统18控制步进电机201转动,带动中控旋转平台202使机械臂2运动于抛光工位4上方,机械臂2通过滚珠丝杠组件203沿z轴下降距离抛光工位4至5mm处松开气爪,电控系统18控制气压电磁阀启动气压控制,根据设置的抛光气压参数重新进行样品抓取。
99.步骤十,电控系统18控制喷淋电磁阀经喷抛光液水龙头6进行喷抛光液3秒,控制抛光工位电磁阀启动抛光工位4,通过小臂旋转伺服电机204控制曲柄滑块机构205,使三抓气缸206沿抛光工位4依逆时针旋转,电控系统18控制喷淋电磁阀每隔10~15秒通过喷抛光液水龙头6进行自动喷抛光液2秒。
100.步骤十一,触摸屏16上记录并显示设置的总研磨圈数和已经完成的研磨圈数,当达到设定抛光圈数,电控系统18控制抛光工位电磁阀停止工作,控制机械臂2沿z轴同时抬起并通过小臂旋转一圈至初始位置。
101.步骤十二,电控系统18控制步进电机201转动,带动中控旋转平台202使机械臂2运动至超声清洗位14,机械臂2通过滚珠丝杠组件203沿z轴下降至距超声清洗位14底部10mm处松开气爪,超声清洗5~15秒,机械臂2沿z轴抬起并通过中控旋转平台202旋转至样品预置工位15上方,沿z轴下降放置样品至初始位置,即完成自动磨抛。
102.本实施例中,电控系统18可选择自由磨抛模式,若仅设置研磨参数,则不进行步骤九、步骤十和步骤十一三步操作,若仅设置抛光参数,则不进行步骤六、步骤七和步骤八三步操作。
103.作为本实施例的一种优选方案,如图9所示,通过三爪气缸(206抓取样品时,执行平整度调整工序,所述的平整度调整工序采用先抓紧,再松开,最后二次抓紧的抓取方法,具体包括以下步骤:
104.步骤1,三爪气缸206先抓紧光片样品,电控系统18控制步进电机201转动,带动中控旋转平台202使机械臂2运动于研磨工位3或抛光工位4上,此时光片样品和研磨工位3或抛光工位4之间的平整度未调整,进气口7未提供高压气体;
105.步骤2,三爪气缸206再松开光片样品,使光片样品自由置于研磨工位3或抛光工位4上,同时电控系统18驱动进气口7张开,为光片样品提供高压气体,使光片样品在高压气体和重力的双重作用下,达到与研磨工位3或抛光工位4实现平整;
106.步骤3,三爪气缸(206最后二次抓紧光片样品,执行后续磨抛工序。
107.如图10(a)、图10(b)、图11(a)和图11(b)所示,执行本实施例的平整度调整工序后,磨抛效果有明显好转。
108.应用例1至6:
109.下述应用例给出一种基于实施例2的一种煤岩粉煤光片的磨抛工艺。具体而言,根据样品情况,对于不同变质程度的单种煤、混煤及焦炭,探索出一套独特的磨抛参数,可在自动磨抛一体机触摸屏4中内输入对应的磨抛气压、磨抛速度、磨抛圈数等,具体磨抛参数如表1。
110.表1固定的磨抛参数
[0111][0112]
应用例1:
[0113]
采用褐煤煤粉进行制作冷胶粉煤光片,砂纸粒度为1500目,设置研磨气压为0.050mpa,研磨速度600r/min,研磨抓手转速2r/min,研磨圈数4圈,抛光气压为0.070mpa,抛光工位转速2000r/min,抛光抓手转速2r/min,抛光圈数4圈。整个磨样时间在5min以内,所制得的粉煤光片在显微镜下观察,样品表面表面平整,无明显突起、凹痕,煤颗粒表面显微组分界线清晰、无明显划道,一次成样率100%。
[0114]
应用例2:
[0115]
采用烟煤煤粉进行制作热胶粉煤光片,砂纸粒度为1200目,设置研磨气压为0.070mpa,研磨速度900r/min,研磨抓手转速2r/min,研磨圈数2圈,抛光气压为0.100mpa,抛光工位转速1800r/min,抛光抓手转速2r/min,抛光圈数4圈。整个磨样时间在5min以内,所制得的粉煤光片在显微镜下观察,样品表面表面平整,无明显突起、凹痕,煤颗粒表面显微组分界线清晰、无明显划道,一次成样率100%。
[0116]
应用例3:
[0117]
采用烟煤煤粉进行制作冷胶粉煤光片,砂纸粒度为1500目,设置研磨气压为0.080mpa,研磨速度1200r/min,研磨抓手转速3r/min,研磨圈数2圈,抛光气压为0.120mpa,抛光工位转速2000r/min,抛光抓手转速2r/min,抛光圈数4圈。整个磨样时间在5min以内,所制得的粉煤光片在显微镜下观察,样品表面表面平整,无明显突起、凹痕,煤颗粒表面显微组分界线清晰、无明显划道,一次成样率100%。
[0118]
应用例4:
[0119]
采用无烟煤煤粉进行制作热胶粉煤光片,砂纸粒度为1500目,设置研磨气压为0.100mpa,研磨速度1200r/min,研磨抓手转速3r/min,研磨圈数4圈,抛光气压为0.140mpa,抛光工位转速2000r/min,抛光抓手转速4r/min,抛光圈数4圈。整个磨样时间在5min以内,所制得的粉煤光片在显微镜下观察,样品表面表面平整,无明显突起、凹痕,煤颗粒表面显微组分界线清晰、无明显划道,一次成样率100%。
[0120]
应用例5:
[0121]
采用混煤煤粉进行制作冷胶粉煤光片,砂纸粒度为1800目,设置研磨气压为0.100mpa,研磨速度1500r/min,研磨抓手转速2r/min,研磨圈数6圈,抛光气压为0.140mpa,抛光工位转速2000r/min,抛光抓手转速4r/min,抛光圈数4圈。整个磨样时间在5min以内,所制得的粉煤光片在显微镜下观察,样品表面表面平整,无明显突起、凹痕,煤颗粒表面显微组分界线清晰、无明显划道,一次成样率100%。
[0122]
应用例6:
[0123]
采用焦炭粉进行制作冷胶焦炭光片,砂纸粒度为1500目,设置研磨气压为0.120mpa,研磨速度900r/min,研磨抓手转速1r/min,研磨圈数4圈,抛光气压为0.150mpa,抛光工位转速1800r/min,抛光抓手转速2r/min,抛光圈数4圈。整个磨样时间在5min以内,所制得的焦炭光片在显微镜下观察,样品表面表面平整,无明显突起、凹痕,焦炭颗粒表面显微组分界线清晰、无明显划道,一次成样率100%。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1